TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025046707
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023154950
出願日
2023-09-21
発明の名称
ハンドリング装置
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
15/08 20060101AFI20250326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者による手作業に近いハンドリング作業が実現すること。
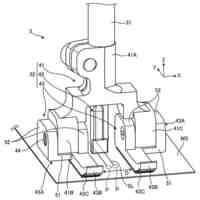
【解決手段】ハンドリング装置は、ロボットマニピュレータと、ロボットマニピュレータに装着され、開閉可能な一対の指部と、一対の指部を開閉動作させる第1アクチュエータと、を有する把持アセンブリと、を備え、一対の指部の各々は、指部の基端部および先端部に配置される基端プーリおよび先端プーリと、基端プーリおよび先端プーリにかけ渡され、外表面が生地との接触面を構成する無端ベルトと、を含み、把持アセンブリは、無端ベルトを回転駆動する第2アクチュエータを有する。
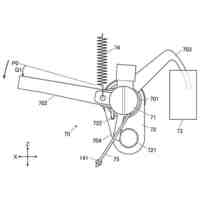
【選択図】図7
特許請求の範囲
【請求項1】
生地をハンドリングするハンドリング装置であって、
ロボットマニピュレータと、
前記ロボットマニピュレータに装着され、開閉可能な一対の指部と、前記一対の指部を開閉動作させる第1アクチュエータと、を有する把持アセンブリと、を備え、
前記一対の指部の各々は、前記指部の基端部および先端部に配置される基端プーリおよび先端プーリと、前記基端プーリおよび前記先端プーリにかけ渡され、外表面が前記生地との接触面を構成する無端ベルトと、を含み、
前記把持アセンブリは、前記無端ベルトを回転駆動する第2アクチュエータを有する、
ハンドリング装置。
続きを表示(約 850 文字)
【請求項2】
前記一対の指部は、位置が固定された固定指部と、前記第1アクチュエータにより前記固定指部に対して接近及び離隔する可動指部とを含む、
請求項1に記載のハンドリング装置。
【請求項3】
前記第2アクチュエータは、前記一対の指部に個別に設けられている、
請求項1に記載のハンドリング装置。
【請求項4】
前記一対の指部の閉状態において、前記一対の指部の前記先端プーリ同士が近接し、
前記無端ベルトは、前記先端プーリの周上の位置から、前記先端プーリと前記基端プーリとの間の位置までの範囲で、前記生地と接触する、
請求項1から3のいずれか1項に記載のハンドリング装置。
【請求項5】
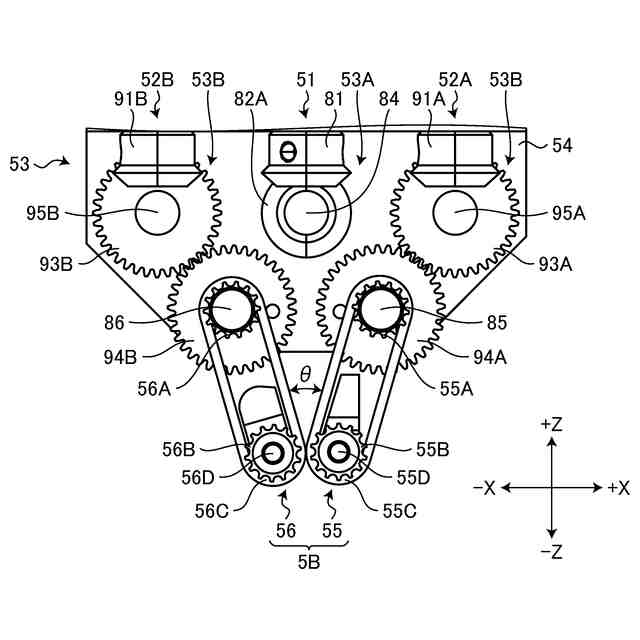
前記一対の指部の閉状態において、前記一対の指部の各々の前記無端ベルトがなす角度が鋭角となる、
請求項4に記載のハンドリング装置。
【請求項6】
前記第1アクチュエータ及び前記第2アクチュエータを制御する制御装置をさらに備え、
前記制御装置は、
前記第1アクチュエータにより閉状態にした前記一対の指部の間に前記生地を挟持させた状態で、前記第2アクチュエータを駆動させ、
前記第2アクチュエータが発生するトルクに基づいて、前記一対の指部に挟持された状態で前記生地の端部を検出する、
請求項1から3のいずれか1項に記載のハンドリング装置。
【請求項7】
前記一対の指部の閉状態で、前記一対の指部の前記先端プーリ同士が開閉方向に近接し、かつ、前記一対の指部の前記基端プーリ同士が開閉方向に近接する、
請求項4に記載のハンドリング装置。
【請求項8】
前記一対の指部の少なくとも一方を、前記先端プーリの回転軸に沿った方向へ移動させる第3アクチュエータをさらに備える、
請求項1から3のいずれか1項に記載のハンドリング装置。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、ハンドリング装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、ロボットにより、被縫製物である生地を縫製位置まで搬送したり、生地を折り返して縫い代を形成したりするシステムが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-147721号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
柔軟素材である生地を、適切に折り返したり、生地端を揃えたりするハンドリング作業は、縫製作業者は感覚的に実行できるが、ロボットマニピュレータにとっては難度が高い。作業者による手作業に近いハンドリング作業を実現することが望まれている。
【0005】
本発明の態様は、作業者による手作業に近いハンドリング作業を実現することを目的とする。
【課題を解決するための手段】
【0006】
本発明の態様に従えば、縫製される生地をハンドリングするハンドリング装置であって、ロボットマニピュレータと、前記ロボットマニピュレータに装着され、開閉可能な一対の指部と、前記一対の指部を開閉動作させる第1アクチュエータと、を有する把持アセンブリと、を備え、前記一対の指部の各々は、前記指部の基端部および先端部に配置される基端プーリおよび先端プーリと、前記基端プーリおよび前記先端プーリにかけ渡され、外表面が前記生地との接触面を構成する無端ベルトと、を含み、前記把持アセンブリは、前記無端ベルトを回転駆動する第2アクチュエータを有する、ハンドリング装置が提供される。
【発明の効果】
【0007】
本明細書で開示する技術によれば、作業者による手作業に近いハンドリング作業が実現できる。
【図面の簡単な説明】
【0008】
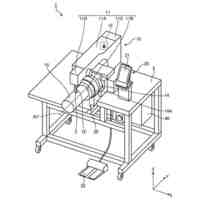
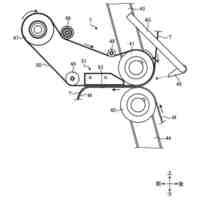
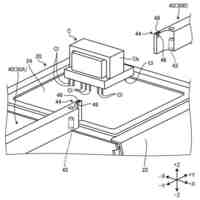
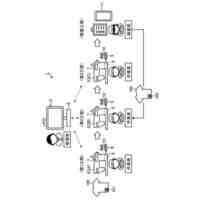
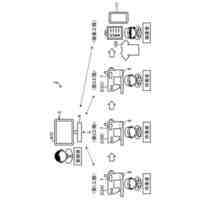
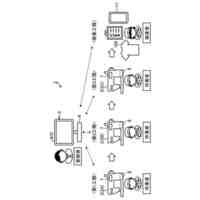
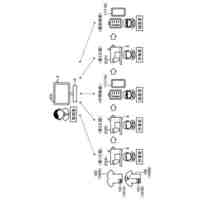
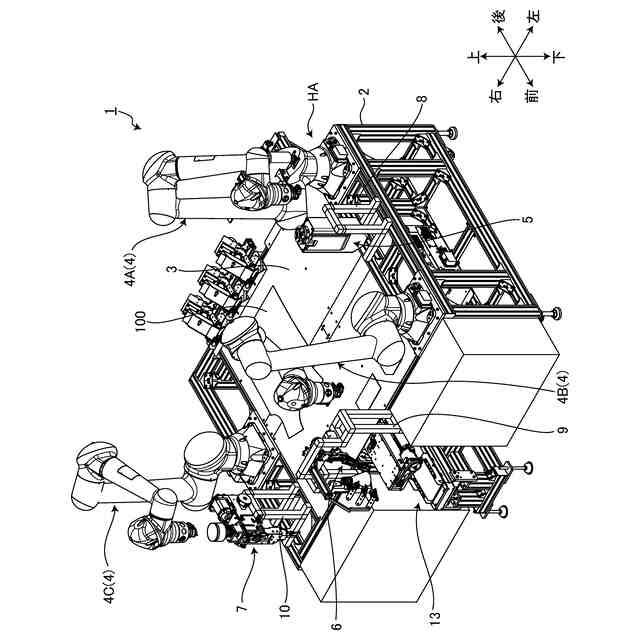
図1は、実施形態に係る縫製装置を示す斜視図である。
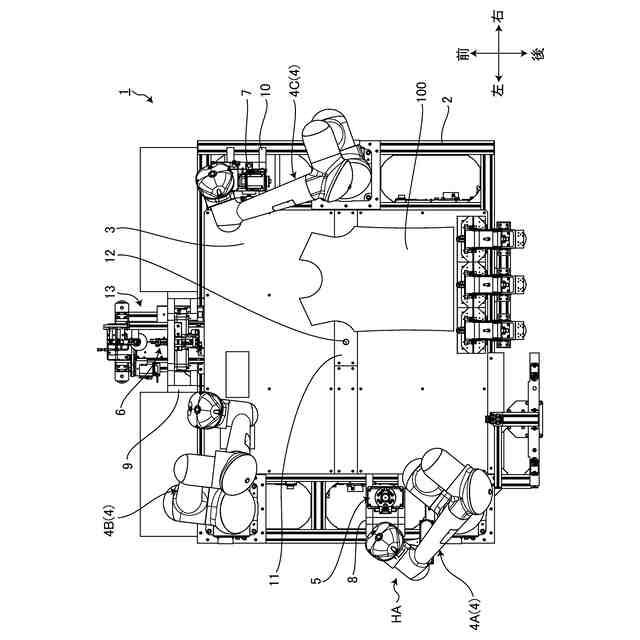
図2は、実施形態に係る縫製装置を示す平面図である。
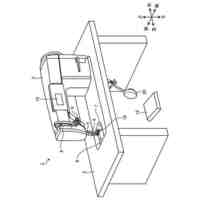
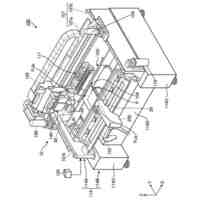
図3は、実施形態に係るハンドリング装置を示す斜視図である。
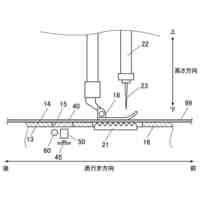
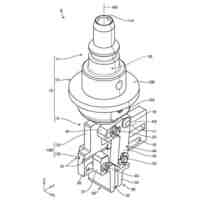
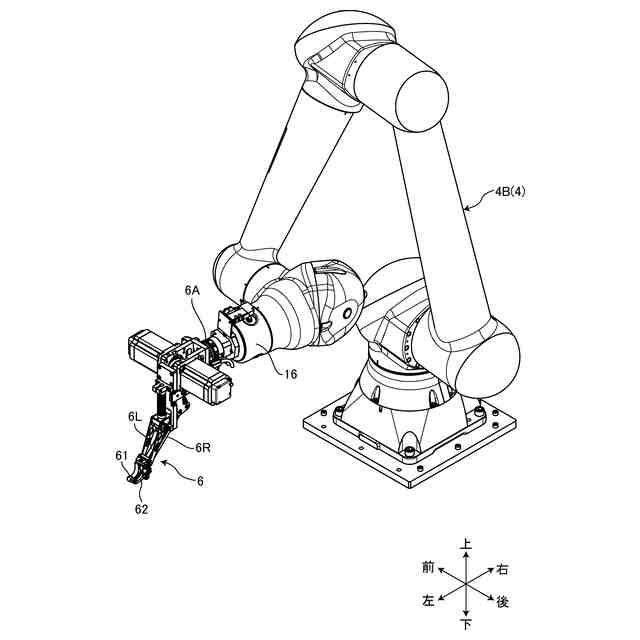
図4は、実施形態に係る第2ロボットマニピュレータの先端部に装着された送りアセンブリを示す斜視図である。
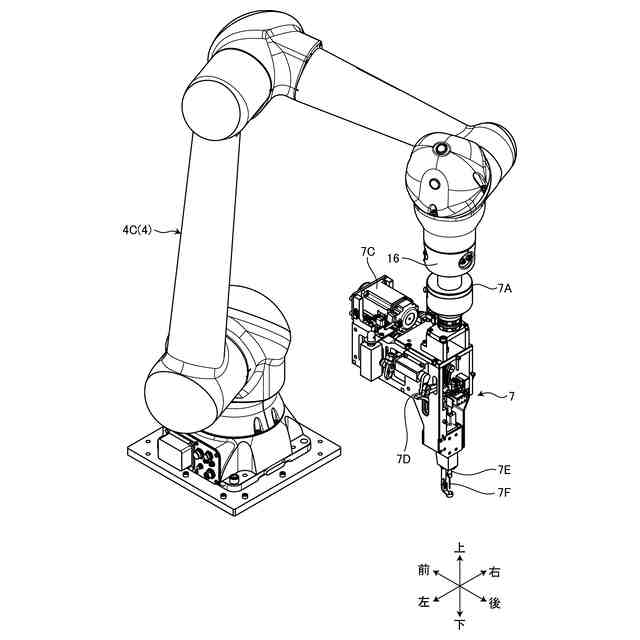
図5は、実施形態に係る第3ロボットマニピュレータの先端部に装着されたミシンアセンブリを示す斜視図である。
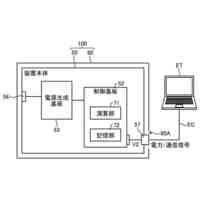
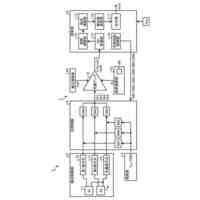
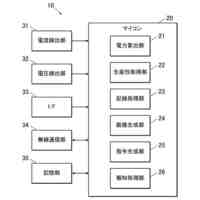
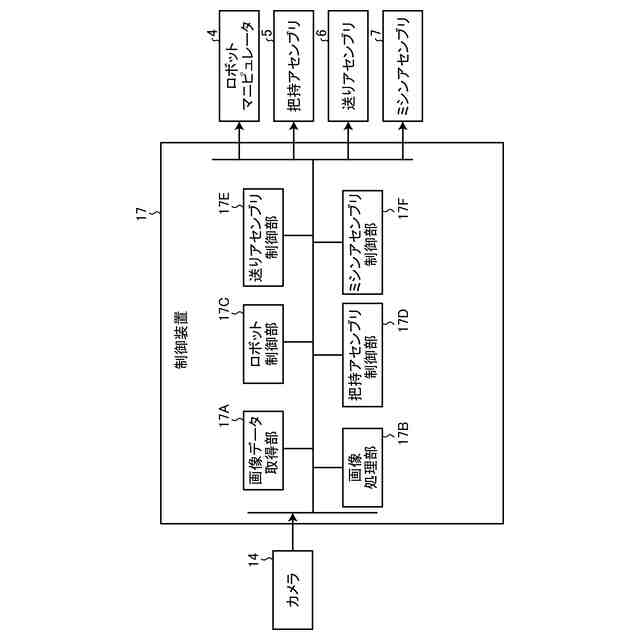
図6は、実施形態に係る縫製装置の制御装置を示すブロック図である。
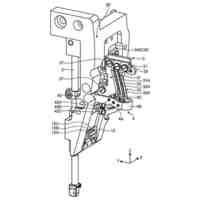
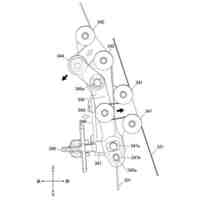
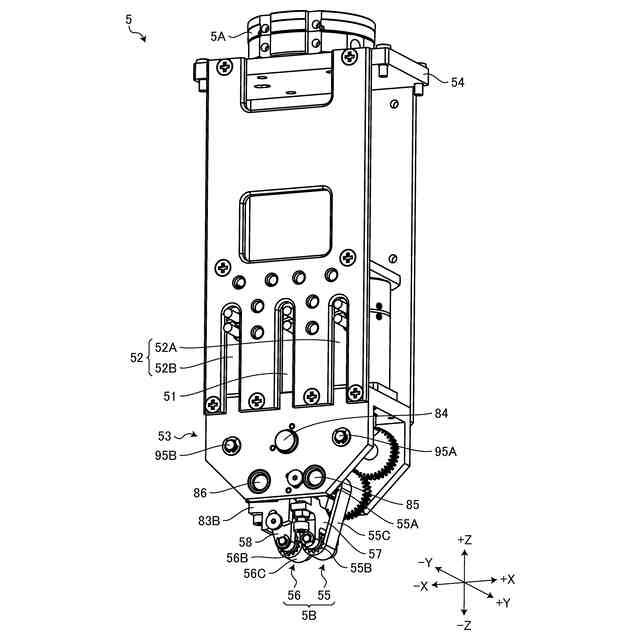
図7は、実施形態に係る把持アセンブリを示す斜視図である。
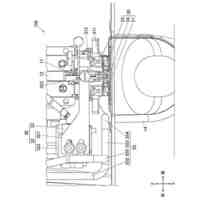
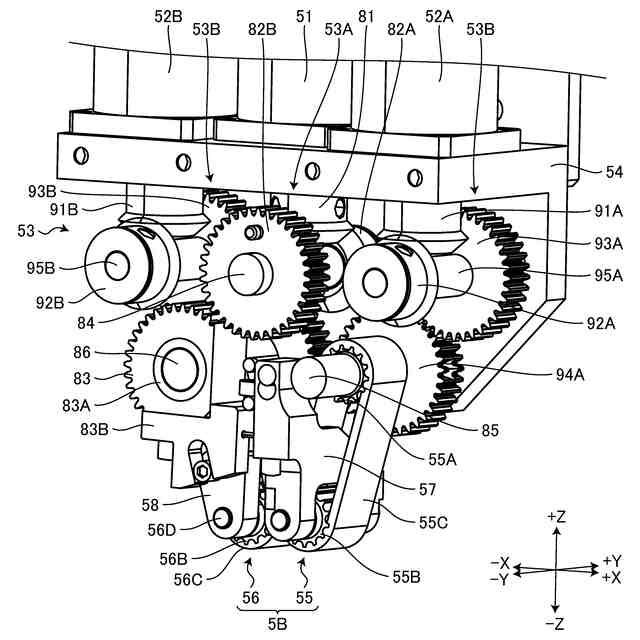
図8は、把持アセンブリの内部を説明する斜視断面図である。
図9は、一対の指部を示した模式的な断面図である。
図10は、第1アクチュエータによる可動指部の開閉を説明する説明図である。
図11は、生地を挟み込んだ状態の一対の指部を示した説明図である。
図12は、生地の端部ED一対の指部の間に配置された状態を示した説明図である。
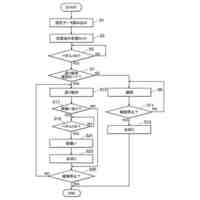
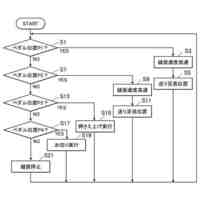
図13は、実施形態に係るハンドリング装置の制御を示すフローチャートである。
図14は、ハンドリング装置の動作の流れを説明する図である。
図15は、第2実施形態に係るハンドリング装置の把持アセンブリを示した斜視説明図である。
図16は、第3アクチュエータおよび可動保持部を示した斜視説明図である。
図17は、一対の指部が生地を挟持した状態を、-X方向に向けて視た模式図である。
図18は、第2実施形態に係るハンドリング装置の固定指部および可動指部を示した模式的な断面図である。
【発明を実施するための形態】
【0009】
[第1実施形態]
以下、実施形態について図面を参照しながら説明する。実施形態においては、左、右、前、後、上、及び下の用語を用いて各部の位置関係について説明する。これらの用語は、縫製装置1の中心を基準とした相対位置又は方向を示す。
【0010】
[縫製装置]
図1は、実施形態に係る縫製装置1を示す斜視図である。図2は、実施形態に係る縫製装置1を示す平面図である。本実施形態では、ロボットマニピュレータ4と、把持アセンブリ5とを備えるハンドリング装置HAを、縫製装置1に適用した例を示す。図1及び図2に示すように、縫製装置1は、架台2と、天板3と、ロボットマニピュレータ4と、把持アセンブリ5と、送りアセンブリ6と、ミシンアセンブリ7とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
3か月前
JUKI株式会社
ミシン
14日前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
19日前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン機構
3か月前
JUKI株式会社
基板作業装置
13日前
JUKI株式会社
縫製システム
2か月前
JUKI株式会社
部品実装装置
13日前
JUKI株式会社
差動送りミシン
1か月前
JUKI株式会社
上下送りミシン
13日前
JUKI株式会社
ミシン制御装置
2か月前
JUKI株式会社
ボンディング装置
12日前
JUKI株式会社
ボンディング装置
12日前
JUKI株式会社
縁かがり縫いミシン
2か月前
JUKI株式会社
縁かがり縫いミシン
1か月前
JUKI株式会社
ボタン付け縫製装置
1か月前
JUKI株式会社
ミシンの糸切り装置
14日前
JUKI株式会社
被縫製物の位置決め装置
12日前
JUKI株式会社
磁気検出回路及びミシン
13日前
JUKI株式会社
ミシンの消費電力分析装置
2か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
リード矯正装置及び実装装置
14日前
JUKI株式会社
グリップ装置及び部品実装装置
1か月前
JUKI株式会社
実装装置及び実装装置の制御方法
1か月前
JUKI株式会社
工業用ミシン及びユーザ認証方法
2か月前
JUKI株式会社
実装装置及び実装装置の制御方法
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
2か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
2か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
2か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ