TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104000
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221813
出願日
2023-12-27
発明の名称
基板作業装置
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H05K
13/04 20060101AFI20250702BHJP(他に分類されない電気技術)
要約
【課題】電子部品の実装において基板の撓みを抑制すること。
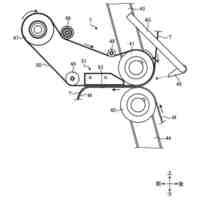
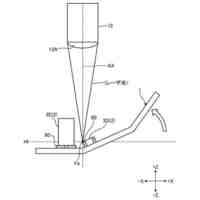
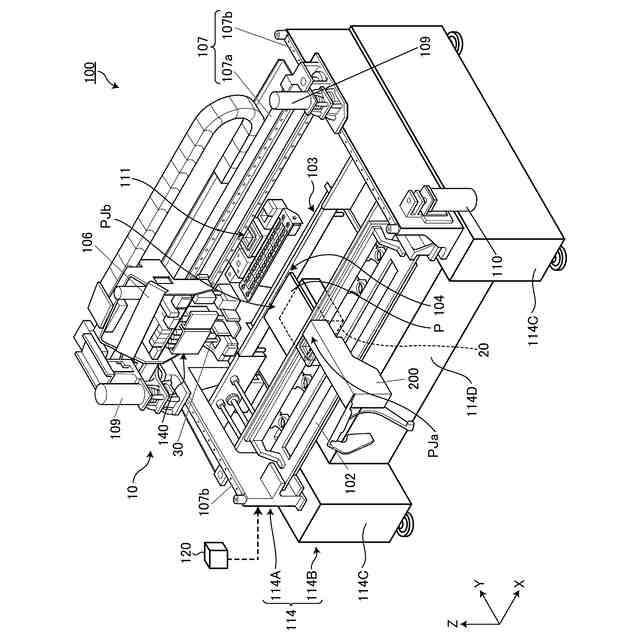
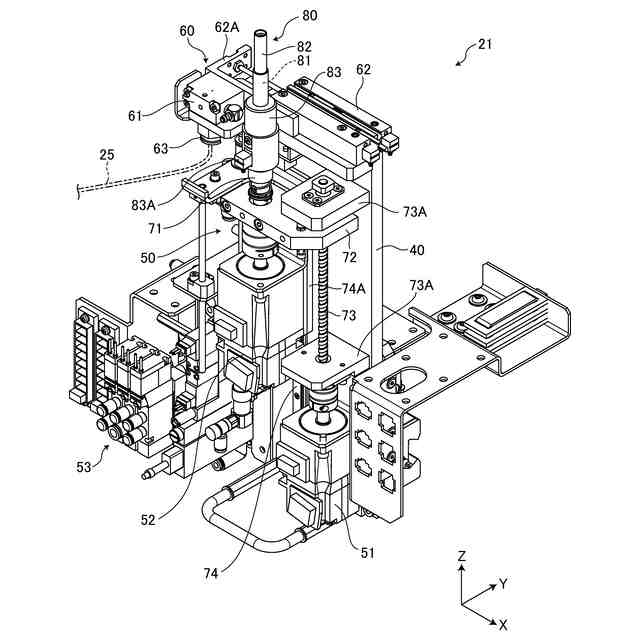
【解決手段】基板作業装置は、基板を作業位置に保持する基板保持装置と、基板保持装置よりも上方に配置され、基板保持装置に保持された基板の上面に部品を搭載する実装ユニットと、基板保持装置よりも下方に配置され、基板の上面に搭載された部品に対して、基板の下方からねじ締めを行うねじ締めユニットと、を備える。ねじ締めユニットは、基板保持装置に保持された基板の下面と対面する上向き姿勢のままで、ねじの取得とねじ締めとを行う作業ヘッドと、作業ヘッドをねじ装着位置へ移動させる移動機構と、を含む。
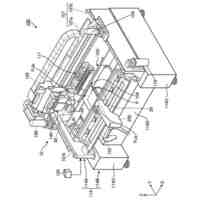
【選択図】図1
特許請求の範囲
【請求項1】
基板を作業位置に保持する基板保持装置と、
前記基板保持装置よりも上方に配置され、前記基板保持装置に保持された前記基板の上面に部品を搭載する実装ユニットと、
前記基板保持装置よりも下方に配置され、前記基板の上面に搭載された前記部品に対して、前記基板の下方からねじ締めを行うねじ締めユニットと、を備え、
前記ねじ締めユニットは、
前記基板保持装置に保持された前記基板の下面と対面する上向き姿勢のままで、ねじの取得とねじ締めとを行う作業ヘッドと、
前記作業ヘッドをねじ装着位置へ移動させる移動機構と、を含む、
基板作業装置。
続きを表示(約 730 文字)
【請求項2】
前記ねじ締めユニットは、送出路を介して前記作業ヘッドにねじを送り出す送出機構をさらに含む、
請求項1に記載の基板作業装置。
【請求項3】
前記送出機構は、空気圧によってねじを前記送出路に圧送する、
請求項2に記載の基板作業装置。
【請求項4】
前記作業ヘッドは、ねじの締め付けを行うツール部と、前記送出路からねじを取得して前記ツール部にセットする受け渡し部と、を有する、
請求項2に記載の基板作業装置。
【請求項5】
前記作業ヘッドは、ねじに係合するドライバーツールを着脱可能な装着部を有する、
請求項1に記載の基板作業装置。
【請求項6】
前記装着部は、前記ドライバーツールに代えて、ねじ締め以外の他の作業に用いる拡張ツールを装着可能である、
請求項5に記載の基板作業装置。
【請求項7】
前記拡張ツールは、前記基板の下面に接触して支持する支持具を含み、
前記移動機構は、前記実装ユニットの部品実装に伴い、部品の実装位置に対応する支持位置へ前記支持具を配置するように前記作業ヘッドを移動させる、
請求項6に記載の基板作業装置。
【請求項8】
前記移動機構は、前記基板の下面に沿った平面内で互いに直交するX軸方向とY軸方向とに前記作業ヘッドを移動させるX軸駆動部とY軸駆動部とを含み、
前記作業ヘッドは、ねじの締め付けを行うツール部と、X軸方向及びY軸方向と直交するZ軸方向に前記ツール部を移動させるZ軸駆動部を含む、
請求項1から7のいずれか1項に記載の基板作業装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、基板作業装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
電子機器の生産工程において、基板の表面に部品を実装する作業を行う自動機が使用される。特許文献1には、装置の筐体を上下2段に分け、基板の表面に対して上側から作業を実施する第1のロボットと、基板の裏面に対して下側から作業を実施する第2のロボットとを設けた基板組立装置が開示されている。第1のロボットは、基板の表面に部品を実装する。第2のロボットは、先端にドライバーが設けられた垂直多関節ロボットであり、基板への部品のねじ締め作業を行う。第2のロボットは、筐体の下段に設置されたネジ供給装置からねじをピックアップして、基板の裏面からネジを締め込むことで、基板に対して部品をネジ止めする。
【先行技術文献】
【特許文献】
【0003】
特開2019-209433号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ねじ締め作業を行うロボットは、ドライバーの先端を下向きにしてネジ供給装置からねじをピックアップし、その後、ドライバーの先端を上向きにして部品のねじ締めを行う。ねじ締めを行う度にロボットの先端部(ドライバー)を下向きと上向きとに姿勢変更するため、作業に時間がかかる。装置全体の作業効率を向上するため、ねじ締め作業に要する時間を短縮することが望まれる。
【0005】
本明細書で開示する技術は、ねじ締め作業に要する時間を短縮することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、基板作業装置を開示する。基板作業装置は、基板を作業位置に保持する基板保持装置と、前記基板保持装置よりも上方に配置され、前記基板保持装置に保持された前記基板の上面に部品を搭載する実装ユニットと、前記基板保持装置よりも下方に配置され、前記基板の上面に搭載された前記部品に対して、前記基板の下方からねじ締めを行うねじ締めユニットと、を備え、前記ねじ締めユニットは、前記基板保持装置に保持された前記基板の下面と対面する上向き姿勢のままで、ねじの取得とねじ締めとを行う作業ヘッドと、前記作業ヘッドをねじ装着位置へ移動させる移動機構と、を含む。
【発明の効果】
【0007】
本明細書で開示する技術によれば、ねじ締め作業に要する時間を短縮することができる。
【図面の簡単な説明】
【0008】
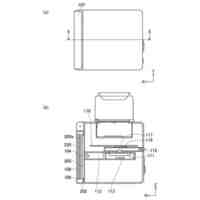
図1は、実施形態に係る基板作業装置を示す斜視図である。
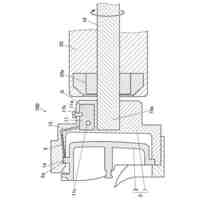
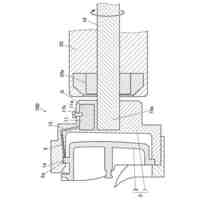
図2は、実施形態に係る実装ヘッドを模式的に示す図である。
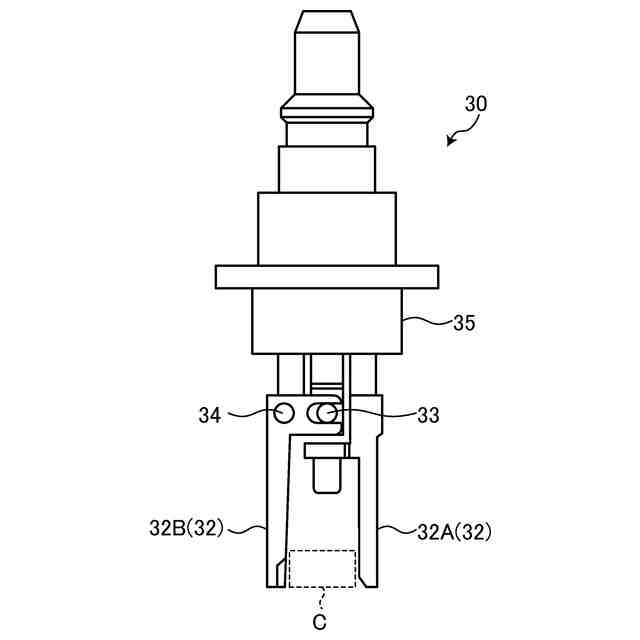
図3は、実施形態に係るノズルを示す図である。
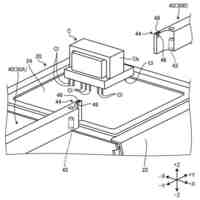
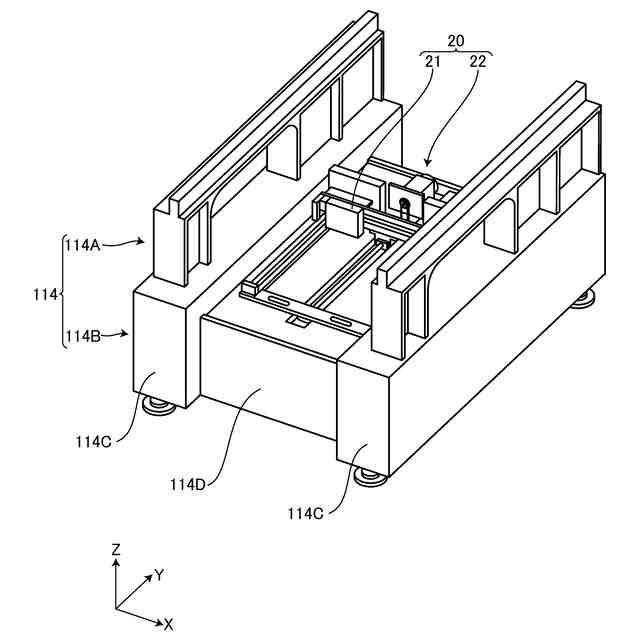
図4は、本実施形態に係るねじ締めユニットの設置位置を示す斜視説明図である。
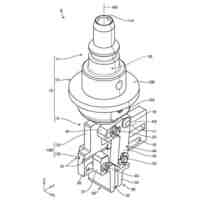
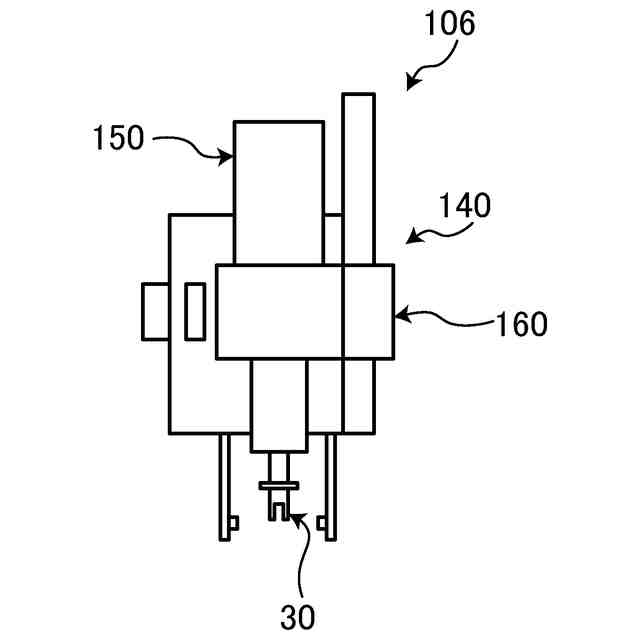
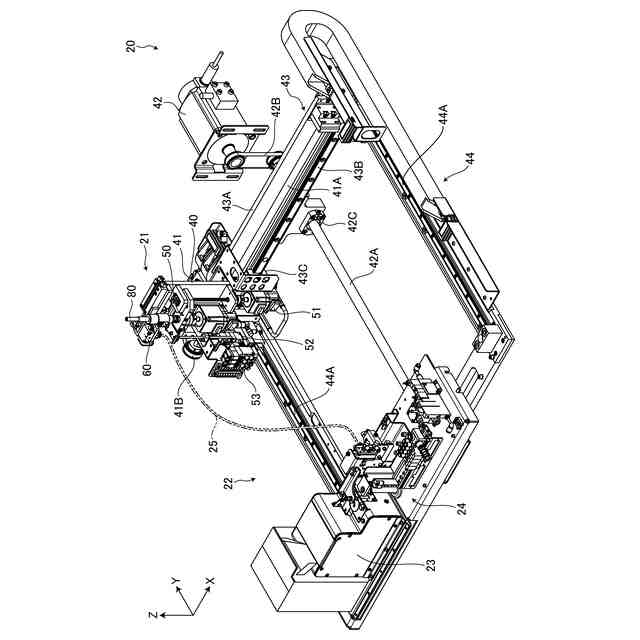
図5は、本実施形態に係るねじ締めユニットを示す斜視図である。
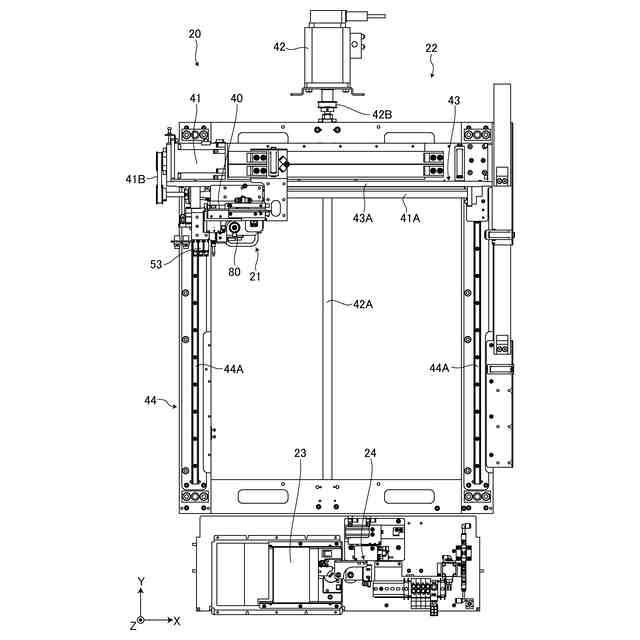
図6は、本実施形態に係るねじ締めユニットを示す上面図である。
図7は、本実施形態に係る作業ヘッドを示す斜視図である。
図8は、本実施形態に係る作業ヘッドを示す正面図である。
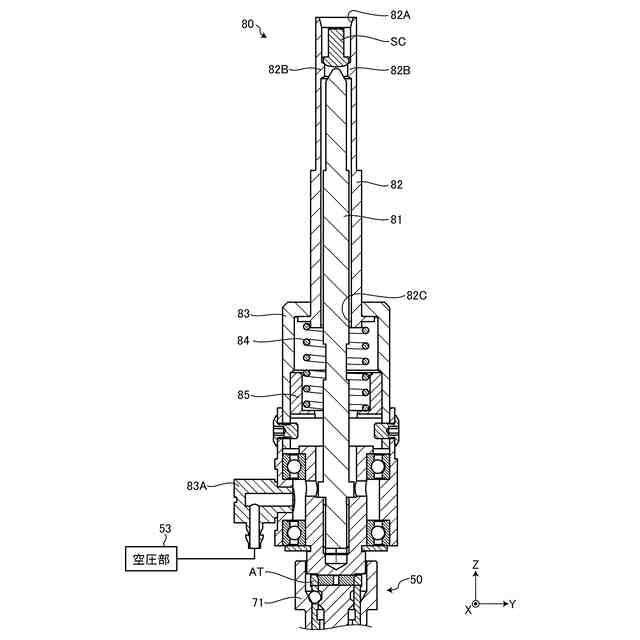
図9は、本実施形態に係るドライバーツールを示す断面図である。
図10は、本実施形態に係る受け渡し部の機能を示す模式図である。
図11は、実施形態に係るねじ供給装置及び送出機構を示す斜視図である。
図12は、実施形態に係る送出機構の要部断面図である。
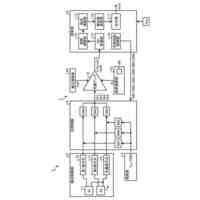
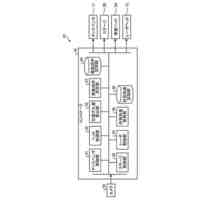
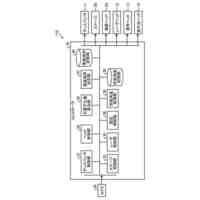
図13は、本実施形態に係る制御装置の一例を示す機能ブロック図である。
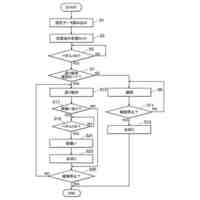
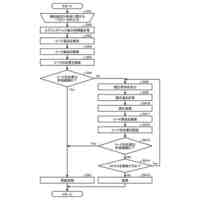
図14は、本実施形態に係る部品実装方法の一例を示すフローチャートである。
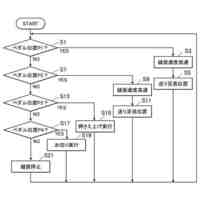
図15は、図14のステップS4におけるねじ締め作業の流れを示すフローチャートである。
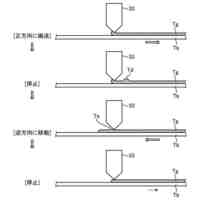
図16は、ねじ締めユニットによるねじ締め動作を示す模式図である。
図17は、実施形態に係るドライバーツールを示した斜視図である。
図18は、実施形態に係る拡張ツールの一例を示した斜視図である。
【発明を実施するための形態】
【0009】
以下、本発明に係る実施形態について図面を参照しながら説明するが、本発明はこれに限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。一部の構成要素を用いない場合もある。
【0010】
以下の説明においては、XYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部の位置関係について説明する。所定面内のX軸と平行な方向をX軸方向とし、所定面内においてX軸と直交するY軸と平行な方向をY軸方向とし、X軸及びY軸のそれぞれと直交するZ軸と平行な方向をZ軸方向とする。X軸を中心とする回転又は傾斜方向をθX方向とし、Y軸を中心とする回転又は傾斜方向をθY方向とし、Z軸を中心とする回転又は傾斜方向をθZ方向とする。所定面は、XY平面である。所定面に平行な方向は、X軸方向及びY軸方向の一方又は両方を含む。Z軸方向は、所定面に直交する方向である。本実施形態において、所定面は、水平面と平行であり、Z軸方向は、上下方向である。なお、所定面は、水平面に対して傾斜してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
16日前
JUKI株式会社
ミシン
11日前
JUKI株式会社
基板作業装置
10日前
JUKI株式会社
部品実装装置
10日前
JUKI株式会社
差動送りミシン
1か月前
JUKI株式会社
上下送りミシン
10日前
JUKI株式会社
ボンディング装置
9日前
JUKI株式会社
ボンディング装置
9日前
JUKI株式会社
縁かがり縫いミシン
1か月前
JUKI株式会社
ミシンの糸切り装置
11日前
JUKI株式会社
ボタン付け縫製装置
1か月前
JUKI株式会社
磁気検出回路及びミシン
10日前
JUKI株式会社
被縫製物の位置決め装置
9日前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
リード矯正装置及び実装装置
11日前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
グリップ装置及び部品実装装置
1か月前
JUKI株式会社
3次元実装装置及び3次元実装方法
9日前
JUKI株式会社
縫製管理システム及び縫製管理方法
9日前
JUKI株式会社
3次元実装装置及び3次元実装方法
9日前
JUKI株式会社
3次元実装装置及び3次元実装方法
9日前
JUKI株式会社
検査装置及び検査装置の位置補正方法
10日前
JUKI株式会社
生産システム、管理装置及び管理方法
9日前
JUKI株式会社
ミシン管理システム及びミシン管理方法
12日前
JUKI株式会社
編み紐付きパーツ、紐編み補助装置、及び紐編み補助方法
1か月前
JUKI株式会社
リード矯正装置、実装装置、及びリード矯正装置の制御方法。
12日前
株式会社コロナ
電気機器
12日前
日本精機株式会社
駆動装置
2か月前
株式会社遠藤照明
照明装置
24日前
日本精機株式会社
回路基板
1か月前
株式会社プロテリアル
シールド材
2か月前
キヤノン株式会社
電子機器
16日前
メクテック株式会社
配線基板
16日前
マクセル株式会社
配列用マスク
3日前
トキコーポレーション株式会社
照明器具
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ