TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104371
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023222061
出願日
2023-12-28
発明の名称
被縫製物の位置決め装置
出願人
JUKI株式会社
代理人
個人
,
個人
主分類
D05B
33/00 20060101AFI20250703BHJP(縫製;刺しゅう;タフティング)
要約
【課題】比較的安価な構成で被縫製物の位置決めを行うことができる被縫製物の位置決め装置を実現する。
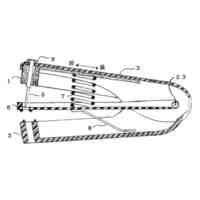
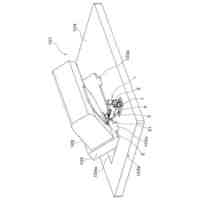
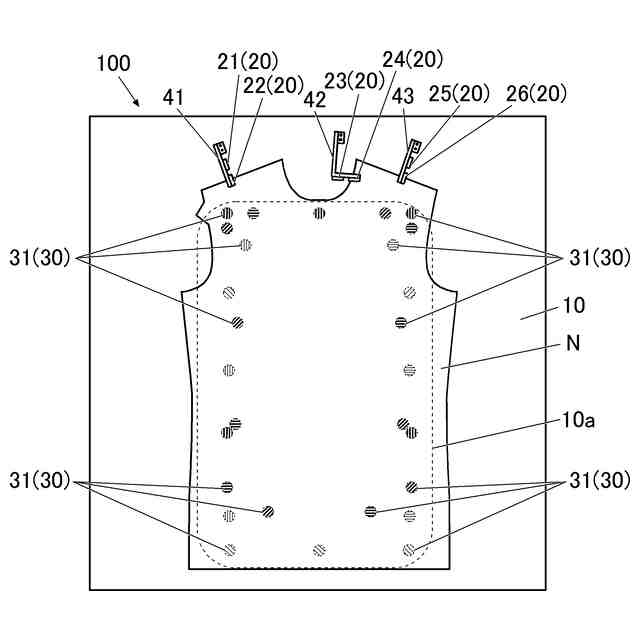
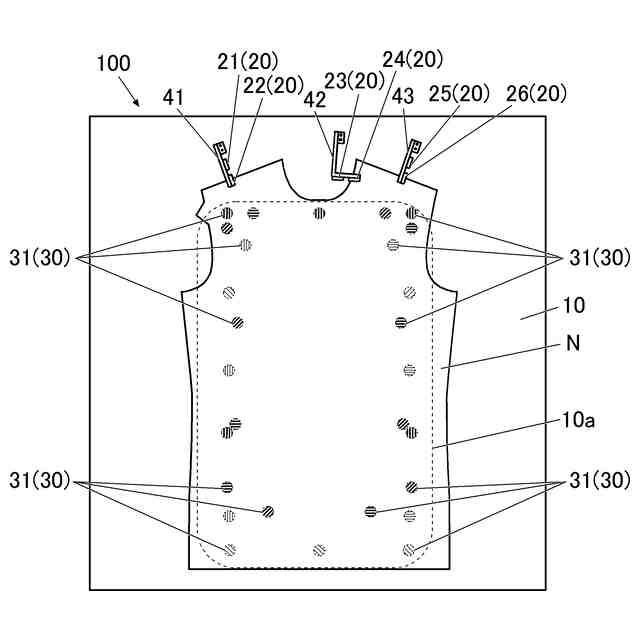
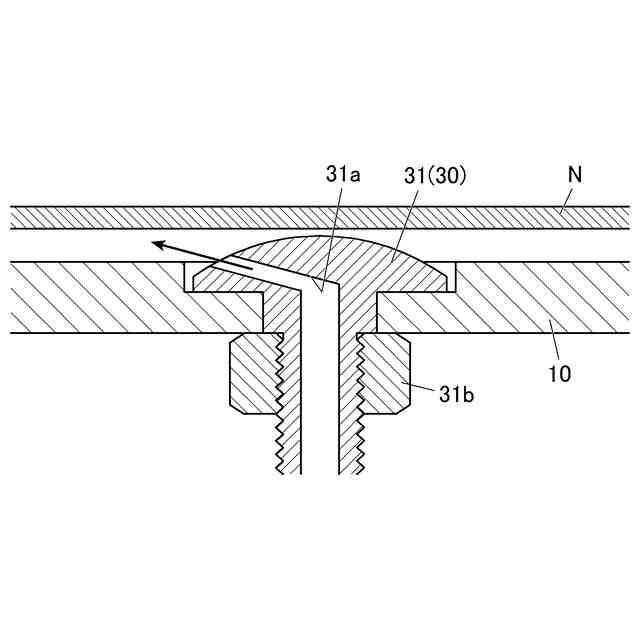
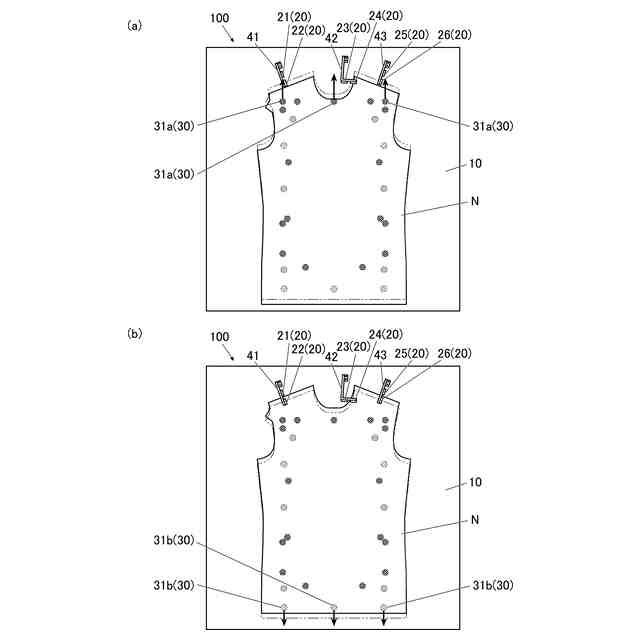
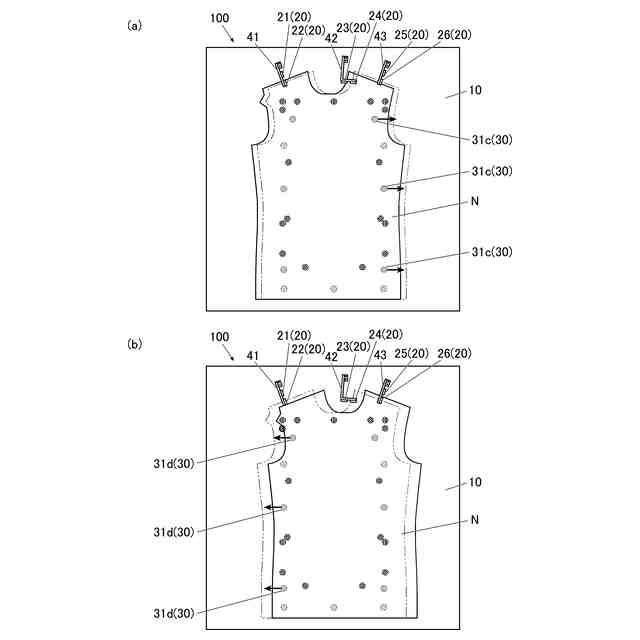
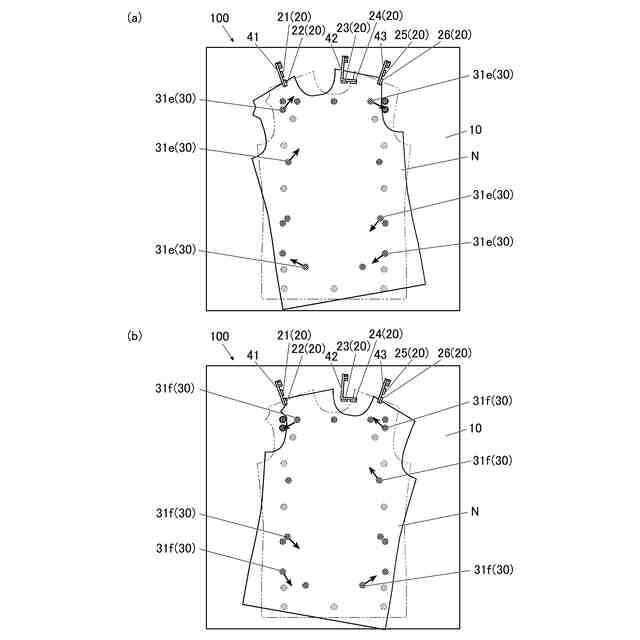
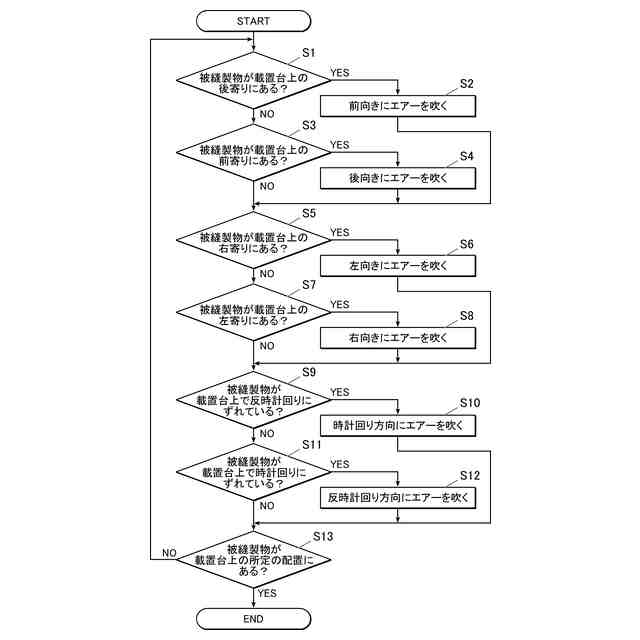
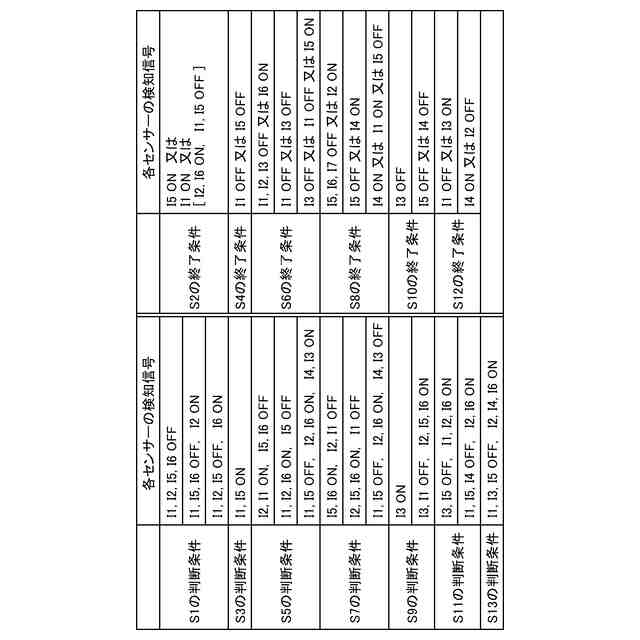
【解決手段】この被縫製物の位置決め装置100では、検出部20のセンサーとして反射型フォトセンサー(21~26)を用い、ノズル31や電磁弁32等で構成された移動力付与部30を用いており、このような構成によって載置台10上に載置された被縫製物Nを所定の配置に位置決めすることができる。つまり、この被縫製物の位置決め装置100は、様々なセンサーやロボットアームなどの高価な構成を必要としていないので、比較的安価な構成で被縫製物の位置決めを行うことができる。
【選択図】図1
特許請求の範囲
【請求項1】
被縫製物がその上面に載置される載置台と、
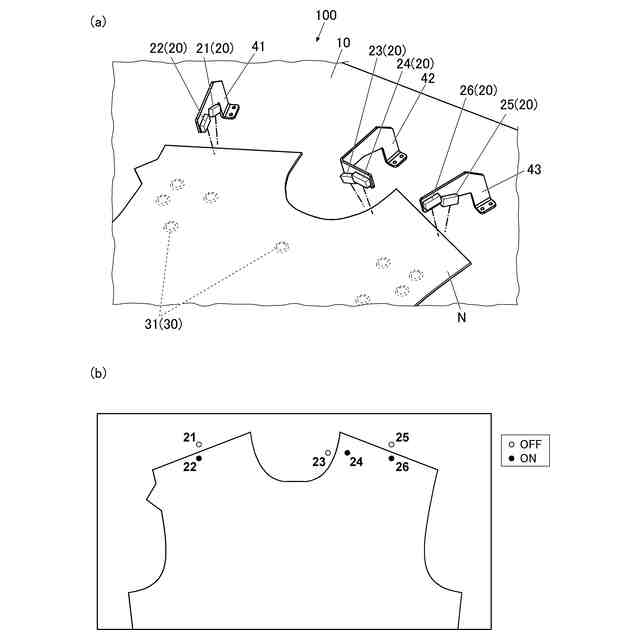
前記載置台上に載置された前記被縫製物の外縁の複数箇所を検出する検出部と、
前記載置台上に載置された前記被縫製物を異なる方向に移動させるよう、前記被縫製物に対して前記異なる方向毎の移動力を付与する移動力付与部と、
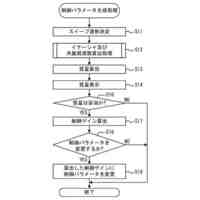
前記検出部が検出した前記被縫製物の外縁の複数箇所の配置が所定の配置になるまで、前記被縫製物の位置及び向きを修正するように前記移動力付与部を制御する制御部と、
を備えたことを特徴とする被縫製物の位置決め装置。
続きを表示(約 360 文字)
【請求項2】
前記検出部は、一点の目標位置で前記被縫製物の外縁の有無を検出するセンサーを複数有することを特徴とする請求項1に記載の被縫製物の位置決め装置。
【請求項3】
前記検出部は、線状の範囲で前記被縫製物の外縁を検出するセンサーを複数有することを特徴とする請求項1に記載の被縫製物の位置決め装置。
【請求項4】
前記移動力付与部は、前記被縫製物に対してエアーを吹き付ける複数のノズルを有することを特徴とする請求項1~3のいずれか一項に記載の被縫製物の位置決め装置。
【請求項5】
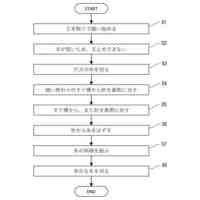
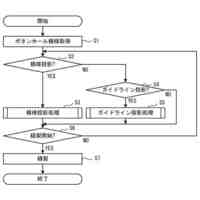
前記制御部は、前記被縫製物の位置の修正に関する動作制御を行ってから前記被縫製物の向きの修正に関する動作制御を行うことを特徴とする請求項1~3のいずれか一項に記載の被縫製物の位置決め装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被縫製物の位置決め装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、被縫製物の位置や向きを各種センサー(二次元変位センサー、磁気センサー、タッチセンサー、光電センサー)で正確に検出し、その被縫製物をロボットアームで保持して縫製装置に向きや位置を整えて供給する技術が知られている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
特開2022-092237号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1の技術の場合、様々なセンサーを用いて被縫製物の位置や向きを正確に検出する構成や、ロボットアームで被縫製物の向きや位置を整える構成は高価であるという問題があった。
【0005】
本発明の目的は、比較的安価な構成で被縫製物の位置決めを行うことができる被縫製物の位置決め装置を提供することである。
【課題を解決するための手段】
【0006】
以上の課題を解決するため、請求項1に記載の発明は、被縫製物の位置決め装置であって、
被縫製物がその上面に載置される載置台と、
前記載置台上に載置された前記被縫製物の外縁の複数箇所を検出する検出部と、
前記載置台上に載置された前記被縫製物を異なる方向に移動させるよう、前記被縫製物に対して前記異なる方向毎の移動力を付与する移動力付与部と、
前記検出部が検出した前記被縫製物の外縁の複数箇所の配置が所定の配置になるまで、前記被縫製物の位置及び向きを修正するように前記移動力付与部を制御する制御部と、
を備えたことを特徴とする。
【0007】
請求項2に記載の発明は、請求項1に記載の被縫製物の位置決め装置において、
前記検出部は、一点の目標位置で前記被縫製物の外縁の有無を検出するセンサーを複数有することを特徴とする。
【0008】
請求項3に記載の発明は、請求項1に記載の被縫製物の位置決め装置において、
前記検出部は、線状の範囲で前記被縫製物の外縁を検出するセンサーを複数有することを特徴とする。
【0009】
請求項4に記載の発明は、請求項1~3のいずれか一項に記載の被縫製物の位置決め装置において、
前記移動力付与部は、前記被縫製物に対してエアーを吹き付ける複数のノズルを有することを特徴とする。
【0010】
請求項5に記載の発明は、請求項1~3のいずれか一項に記載の被縫製物の位置決め装置において、
前記制御部は、前記被縫製物の位置の修正に関する動作制御を行ってから前記被縫製物の向きの修正に関する動作制御を行うことを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
JUKI株式会社
ミシン
26日前
個人
下糸連続供給装置
28日前
株式会社バルダン
ミシン
1か月前
JUKI株式会社
ミシン
26日前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ボビン
1か月前
個人
ニードルパンチ針を使用した仮留め器具
1か月前
個人
縫製方法
3か月前
ブラザー工業株式会社
縫製装置
1か月前
JUKI株式会社
ミシンの布押え
1か月前
ブラザー工業株式会社
糸巻回装置
1か月前
ブラザー工業株式会社
糸巻回装置
1か月前
株式会社PEGASUS
偏平縫いミシンの押え装置
1か月前
株式会社PEGASUS
偏平縫いミシンの送り装置
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
KLASS株式会社
畳縫着装置
2か月前
JUKI株式会社
取得装置及び二本針ミシン
1か月前
JUKI株式会社
ミシン
3か月前
星鋭縫じん機股ふん有限公司
ミシン
3か月前
ブラザー工業株式会社
ミシン及びミシン制御方法
2か月前
JUKI株式会社
ゴム繋ぎ装置
1か月前
ブラザー工業株式会社
移動検出装置及び縫製システム
1か月前
JUKI株式会社
差動送りミシン
1か月前
JUKI株式会社
縫製管理システム
3か月前
株式会社TOK
ミシンの点検時安全装置
1か月前
ブラザー工業株式会社
縫製支援方法、縫製支援プログラム、記憶媒体及び縫製装置
1か月前
ブラザー工業株式会社
縫製支援方法、縫製支援プログラム、記憶媒体及び縫製装置
1か月前
ブラザー工業株式会社
制御パラメータ生成方法、制御パラメータ生成プログラム及び記憶媒体
1か月前
デュルコップ アドラー ゲーエムベーハー
ミシン、そのようなミシンを有する縫製ユニット及びミシンの操作方法
19日前
浙江合和機電有限公司
筒縫い刺繍機の糸切り駆動機構
4か月前
インティヴァ プロダクツ, エルエルシー
ロボット縫製アセンブリの為の旋回式下部アーム
1か月前
他の特許を見る

 特許ウォッチ
特許ウォッチ