TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025156071
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2025048166
出願日
2025-03-24
発明の名称
ロボット縫製アセンブリの為の旋回式下部アーム
出願人
インティヴァ プロダクツ, エルエルシー
,
Inteva Products, LLC
代理人
個人
,
個人
,
個人
主分類
D05B
73/04 20060101AFI20251002BHJP(縫製;刺しゅう;タフティング)
要約
【課題】縫製処理で使用するロボット縫製アセンブリを提供すること。
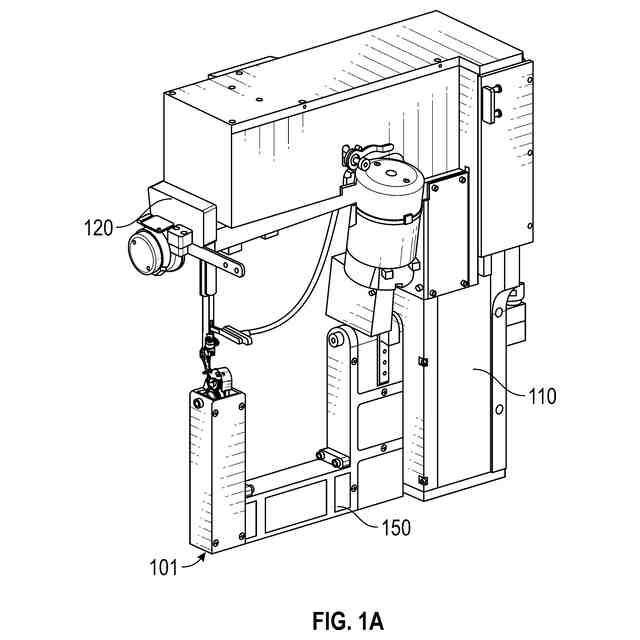
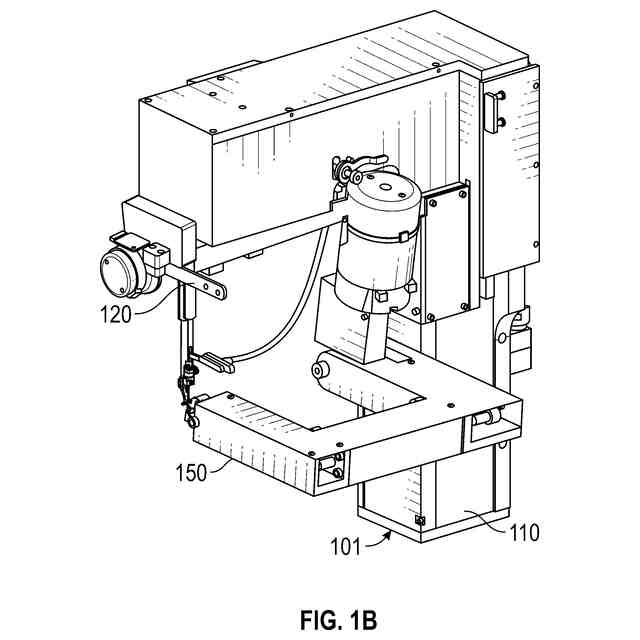
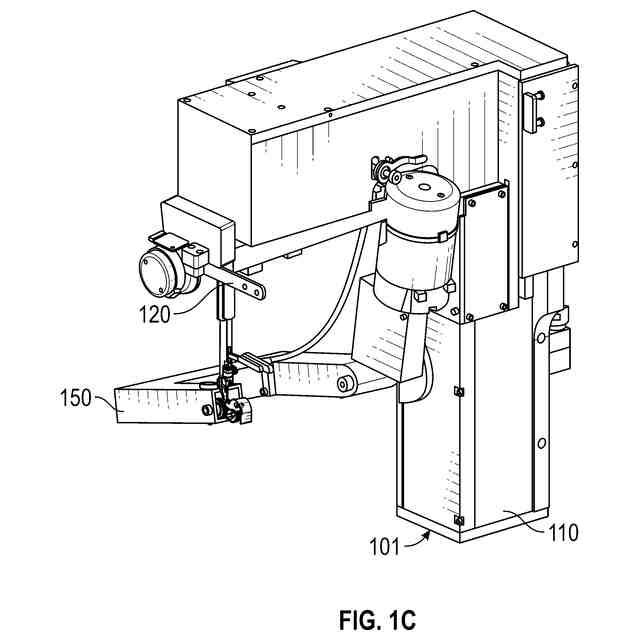
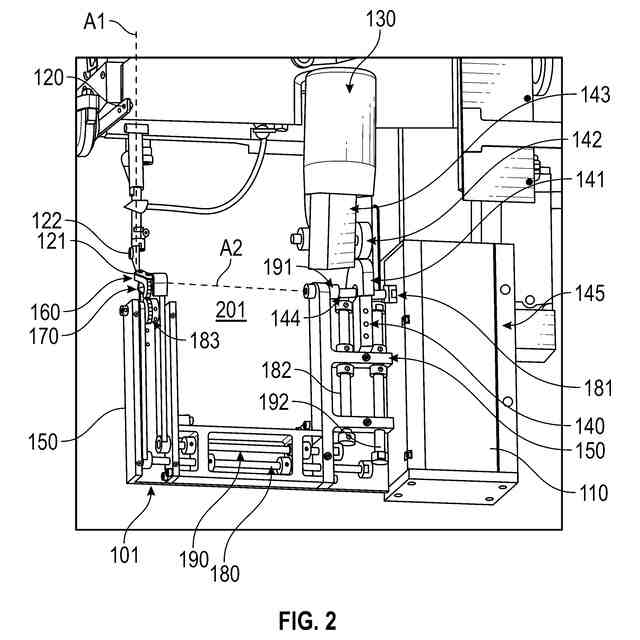
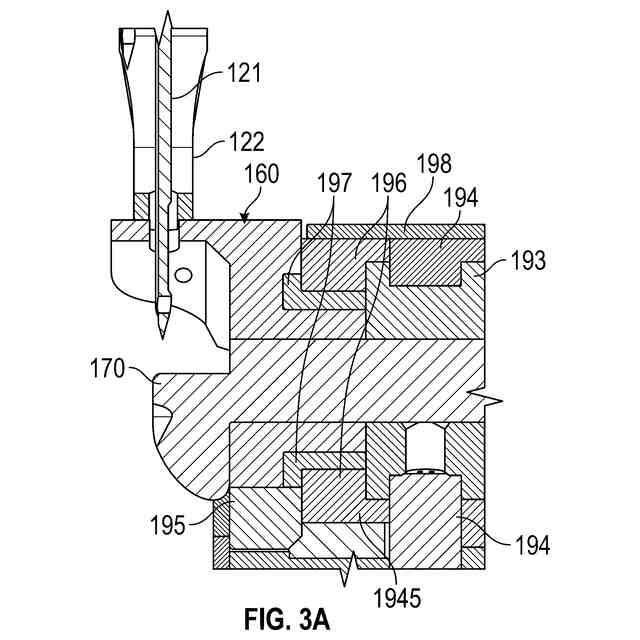
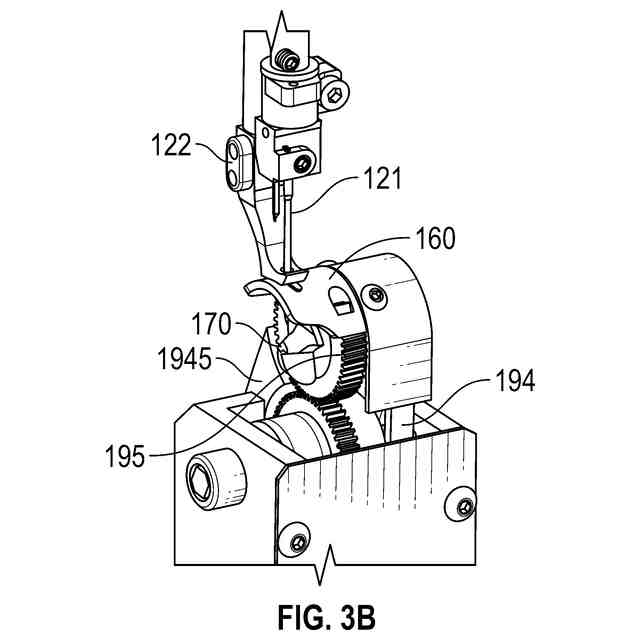
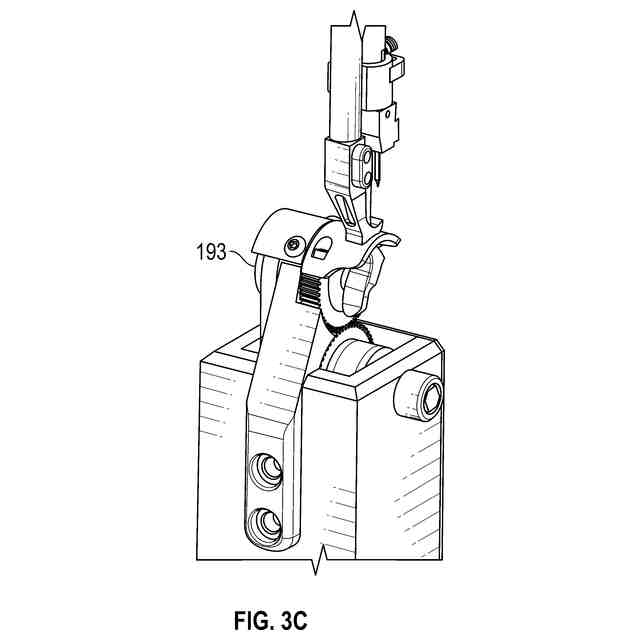
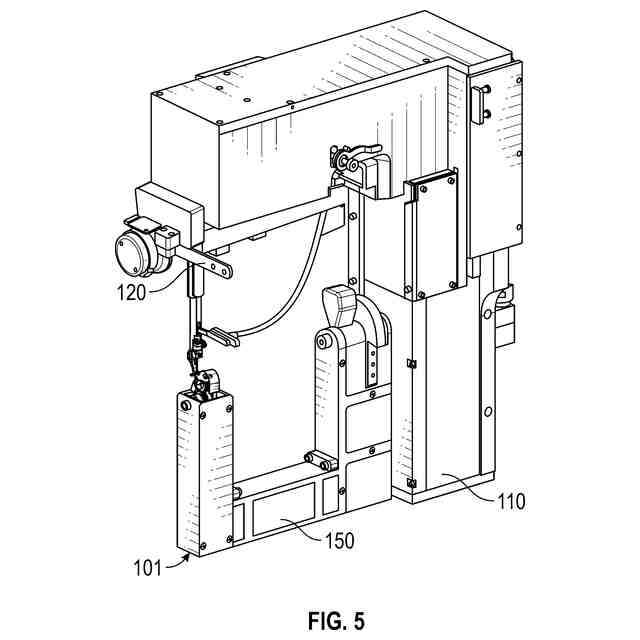
【解決手段】ロボット縫製アセンブリ101は、縫製ヘッド本体110と、上部アーム120と、モータ130と、下部アーム150とを含む。上部アームは、縫製ヘッド本体に取り付け可能であり、第1の軸A1に沿って配向された縫製針121を含む。下部アームは、モータによって第1の軸に対して横断方向に規定された第2の軸A2の周りに回転可能であるように、縫製ヘッド本体に回転可能に取り付け可能である。下部アームは、ステッチプレート160と、バタフライルーパ170と、第1の駆動列180および第2の駆動列190とを含む。第1の駆動列は、下部アームを通って伸長可能であり、下部アームの回転中にステッチプレートの位置を維持するように構成される。第2の駆動列は、下部アームを通って伸長可能であり、下部アームの回転中にバタフライルーパを駆動するように構成される。
【選択図】図2
特許請求の範囲
【請求項1】
ロボット縫製アセンブリであって、
縫製ヘッド本体と、
前記縫製ヘッド本体に取り付け可能であり、第1の軸に沿って配向された縫製針を備える上部アームと、
モータと、
前記モータによって前記縫製ヘッド本体に回転可能に取り付けられ、前記第1の軸に対して横方向に規定された第2の軸を中心に回転可能な下部アームと、
を備え、前記下部アームは、
ステッチプレートと、
バタフライルーパと、
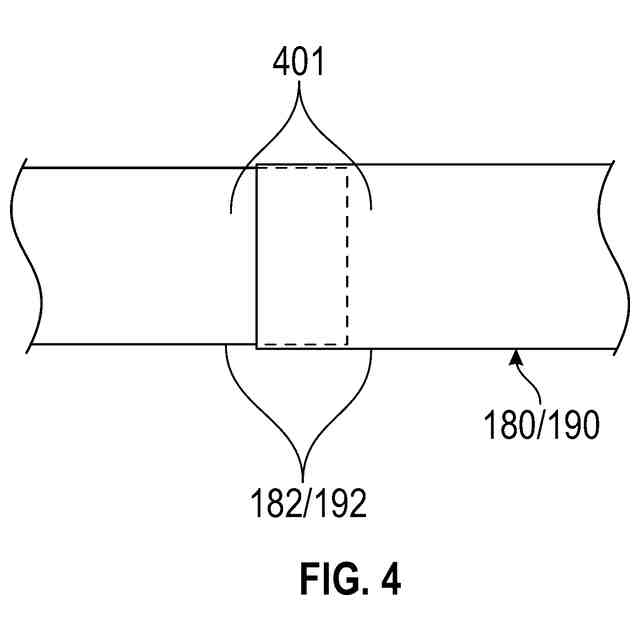
前記下部アームを貫通して伸長可能であり、前記下部アームの回転中に前記ステッチプレートの位置を維持するように構成された第1の駆動列と、
前記下部アームを貫通して伸長可能であり、前記下部アームの回転中に前記バタフライルーパを駆動するように構成された第2の駆動列と、
を備える、ロボット縫製アセンブリ。
続きを表示(約 1,300 文字)
【請求項2】
前記上部アーム、前記縫製針及び前記下部アームは、空の内部縫製領域を画定する、請求項1に記載のロボット縫製アセンブリ。
【請求項3】
前記下部アームは、前記第2の軸を中心として160°回転可能である、請求項1に記載のロボット縫製アセンブリ。
【請求項4】
記下部アームと前記第1の駆動列及び第2の駆動列とは、対応してU字状である、請求項1に記載のロボット縫製アセンブリ。
【請求項5】
前記第1の駆動列および第2の駆動列のうちの少なくとも一方は、同心シャフトを備える、請求項1に記載のロボット縫製アセンブリ。
【請求項6】
下部アームのトルク要求を低減するために使い捨て可能なカウンタウェイトをさらに備える、請求項1に記載のロボット縫製アセンブリ。
【請求項7】
前記縫製ヘッド本体に対して下部アームを支持するために、前記縫製ヘッド本体上に支持的に使い捨て可能な軸受をさらに備える、請求項1に記載のロボット縫製アセンブリ。
【請求項8】
前記縫製ヘッド本体から外向きに伸長可能なウィングと、
前記下部アームの回転中に前記ウィングに対して下部アームを支持するために前記下部アームに取り付け可能である、ころ軸受と、
を更に備える、請求項1に記載のロボット縫製アセンブリ。
【請求項9】
前記縫製ヘッド本体、前記上部アーム、前記下部アームおよび前記下部アームの回転をロボット制御するように構成されたプログラム可能な制御システムをさらに備える、ロボット縫製アセンブリであって、
前記プログラム可能な制御システムは、前記下部アームと縫製される物品との間の距離を計測するためのセンサシステムを備え、
前記プログラム可能な制御システムは、前記センサシステムの読み取り値に従って、前記縫製ヘッド本体、前記上部アーム、前記下部アーム、および前記下部アームの回転のプログラムされた動作を修正するように構成される、請求項1に記載のロボット縫製アセンブリ。
【請求項10】
ロボット縫製アセンブリであって、
縫製ヘッド本体と、
前記縫製ヘッド本体に取り付け可能であり、第1の軸に沿って配向された縫製針を備える上部アームと、
モータと、
下部アーム回転駆動列と、
前記モータにより前記下部アーム回転駆動列を介して前記第1の軸に対して横方向に規定された第2の軸を中心に回転可能に前記縫製ヘッド本体に回転可能に取り付け可能な下部アームと、
を備え、前記下部アームは、
ステッチプレートと、
バタフライルーパと、
前記下部アームを貫通して伸長可能であり、前記下部アームの回転中に前記ステッチプレートの位置を維持するように構成された第1の駆動列と、
前記下部アームを貫通して伸長可能であり、前記下部アームの回転中に前記バタフライルーパを駆動するように構成された第2の駆動列と、
を備える、ロボット縫製アセンブリ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
[関連出願の相互参照]
続きを表示(約 1,200 文字)
【0002】
[0001]本出願は、2024年3月29日に出願された米国仮出願第63/571,783号の利益を主張するものであり、その開示は、その全体が参照により本明細書に組み込まれる。
[背景]
【0003】
[0002]本開示の例示的な実施形態は、縫製処理で使用するためのロボット縫製アセンブリの技術に関する。
【0004】
[0003]現在のロボット縫製技術は、多くの場合、所定の位置に固定された下部アームポスト(即ち、固定位置下部アームポスト)を有する縫製ヘッドを含む。下部アームポストの存在および下部アームポストが所定の位置に固定されているという事実のために、下部アームポストは、複雑な形状を有する部品を縫製することを困難にする場合が多い。複雑な形状を有する部品のための縫製動作の間、下部アームポストは、部品自体に衝突するか、さもなければ、縫製ヘッドが部品の特定の部分にアクセスするのを妨げる可能性がある。このような場合やその他の場合には、縫製ヘッドが縫製動作を完了できるようにするために、縫製ヘッドを調整または再調整する必要がある。
【0005】
[0004]手縫い業界、特に履物やバッグや手荷物の製造では、回転式下部アーム技術が使用されてきた。このような技術は、ロボット縫製技術では利用できない。
【0006】
【概要】
【0007】
[0005]本開示の一態様によれば、ロボット縫製アセンブリが提供され、このロボット縫製アセンブリは、縫製ヘッド本体と、上部アームと、モータと、下部アームとを含む。上部アームは、縫製ヘッド本体に取り付け可能であり、第1の軸に沿って配向された縫製針を含む。下部アームは、モータによって第1の軸に対して横断方向に規定された第2の軸の周りに回転可能であるように、縫製ヘッド本体に回転可能に取り付け可能である。下部アームは、ステッチプレートと、バタフライルーパと、第1の駆動列および第2の駆動列とを含む。第1の駆動列は、下部アームを通って伸長可能であり、下部アームの回転中にステッチプレートの位置を維持するように構成される。第2の駆動列は、下部アームを通って伸長可能であり、下部アームの回転中にバタフライルーパを駆動するように構成される。
【0008】
[0006]追加および/または代替の実施形態によれば、上部アーム、縫製針、および下部アームは、空の内部縫製領域を規定する。
【0009】
[0007]追加的および/または代替的な実施形態によれば、下部アームは、第2の軸を中心に160°回転可能である。
【0010】
[0008]追加的および/または代替的な実施形態によれば、下部アームならびに第1の駆動列および第2の駆動列は、対応してU字状である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ