TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152653
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024054655
出願日
2024-03-28
発明の名称
ミシン
出願人
ブラザー工業株式会社
代理人
個人
,
個人
主分類
D05B
57/08 20060101AFI20251002BHJP(縫製;刺しゅう;タフティング)
要約
【課題】ミシンの第一部材と第二部材との相対位置を、操作ダイヤルを操作して調整が可能なミシンにおいて、操作ダイヤルが適切に操作されているかを判別することに貢献するミシンを提供すること。
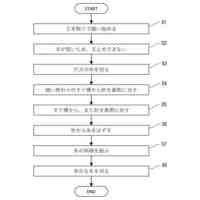
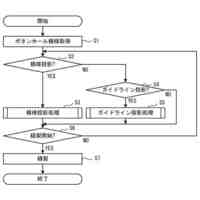
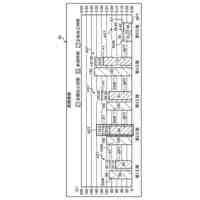
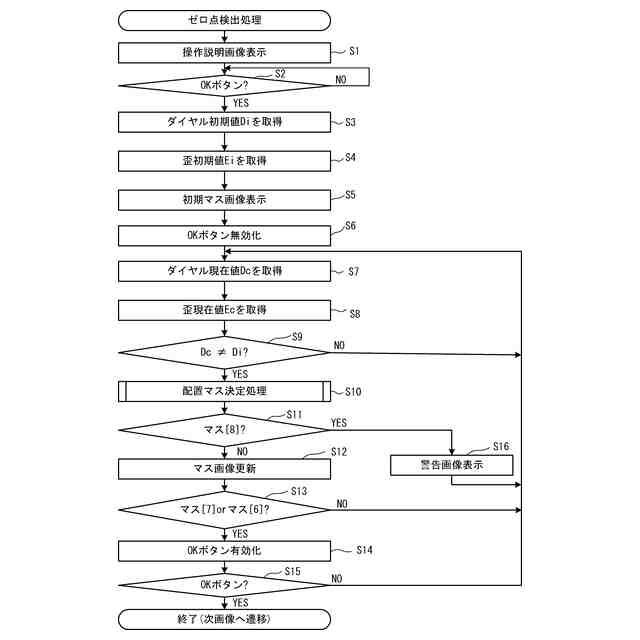
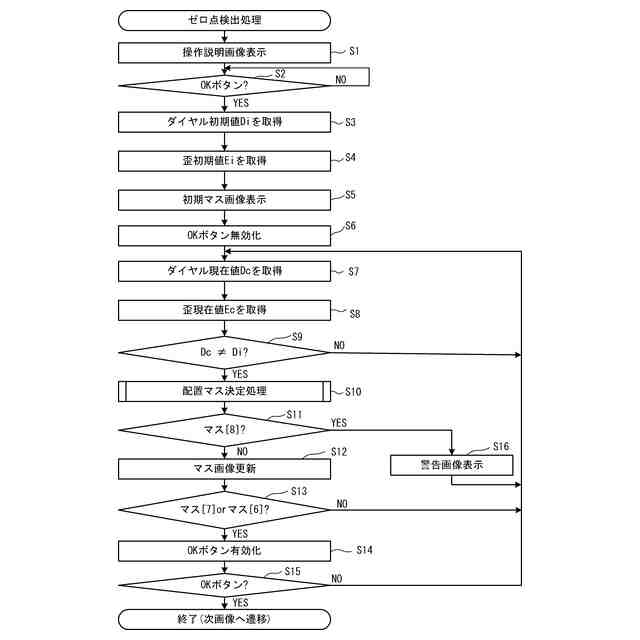
【解決手段】ミシンは、操作ダイヤル、検出器、及び表示制御部を有する。操作ダイヤルは、操作ダイヤルの回転量と回転方向とに応じて第一部材に対する第二部材の相対位置を調整可能である。表示制御部は、第一部材に対する第二部材の相対位置を表す画像であって、第一部材に対する第二部材の目標位置を示す目標位置マークと、第一部材に対する第二部材の初期位置と目標位置とを含む、第一部材に対する第二部材の移動可能範囲と、検出器が検出した回転方向に応じて、第一部材に対する第二部材の相対位置が目標位置に近づいたかを移動可能範囲上に示す現在位置マークとを含む画像を表示部に表示する(S5、S12)。
【選択図】図7
特許請求の範囲
【請求項1】
第一部材に対する第二部材の相対位置を調整可能なミシンにおいて、
第一回転方向と、前記第一回転方向とは逆の第二回転方向との各々に回転操作可能な操作ダイヤルであって、前記操作ダイヤルの回転量と回転方向とに応じて前記第一部材に対する前記第二部材の前記相対位置を調整可能な前記操作ダイヤルと、
前記操作ダイヤルの少なくとも前記回転方向を検出可能な検出器と、
前記第一部材に対する前記第二部材の前記相対位置を表す画像であって、
前記第一部材に対する前記第二部材の目標位置を示す目標位置マークと、
前記第一部材に対する前記第二部材の初期位置と前記目標位置とを含む、前記第一部材に対する前記第二部材の移動可能範囲と、
前記検出器が検出した前記回転方向に応じて、前記第一部材に対する前記第二部材の前記相対位置が前記目標位置に近づいたかを前記移動可能範囲上に示す現在位置マークと
を含む前記画像を表示部に表示する表示制御部と、
を備えることを特徴とするミシン。
続きを表示(約 1,300 文字)
【請求項2】
前記移動可能範囲は、複数のマスで表され、
前記目標位置マークは、前記複数のマスの内の何れかにより示されることを特徴とする請求項1に記載のミシン。
【請求項3】
前記検出器は、前記操作ダイヤルの前記回転方向及び前記回転量を検出可能であり、
前記表示制御部は、
前記検出器が検出した前記回転方向及び前記回転量に応じて、前記移動可能範囲に対する前記現在位置マークの表示位置を変更し、
前記複数のマスの内の前記初期位置のマスである初期マスから、前記初期マスに隣接する第一隣接マスに前記現在位置マークを相対移動させる際の前記検出器が検出する前記操作ダイヤルの回転量は、前記第一隣接マスから、前記初期マスとは別に前記第一隣接マスに隣接する第二隣接マスに前記現在位置マークを相対移動させる際の前記検出器が検出する前記操作ダイヤルの回転量よりも小さいことを特徴とする請求項2に記載のミシン。
【請求項4】
前記第一隣接マスの幅は、前記第二隣接マスの幅より短いことを特徴とする請求項3に記載のミシン。
【請求項5】
前記検出器は、前記操作ダイヤルの前記回転方向及び前記回転量を検出可能であり、
前記表示制御部は、
前記検出器が検出した前記回転方向及び前記回転量に応じて、前記移動可能範囲に対する前記現在位置マークの表示位置を変更し、
前記目標位置マークが位置するマスである目標マスと前記目標マスに隣接する第一目標隣接マスとの間で前記現在位置マークを相対移動する際の前記検出器が検出する前記操作ダイヤルの回転量は、前記第一目標隣接マスと前記目標マスとは別に前記第一目標隣接マスに隣接する第二目標隣接マスとの間で前記現在位置マークを相対移動させる際の前記検出器が検出する前記操作ダイヤルの回転量よりも小さいことを特徴とする請求項2に記載のミシン。
【請求項6】
前記第一目標隣接マスの幅は、前記第二目標隣接マスの幅より短いことを特徴とする請求項5に記載のミシン。
【請求項7】
前記画像において、前記目標位置マークを示す目標マスの色は、前記複数のマスの他のマスと異なる色であることを特徴とする請求項2から4の何れかに記載のミシン。
【請求項8】
前記画像において、前記複数のマスの内の前記移動可能範囲の端部を表す端部マスの色は、他のマスの色とは異なる色であることを特徴とする請求項2から6の何れかに記載のミシン。
【請求項9】
前記表示制御部は、前記検出器が検出した前記操作ダイヤルの回転量が所定量以下である時には、前記現在位置マークを点滅させた前記画像を前記表示部に表示させることを特徴とする請求項1から6の何れかに記載のミシン。
【請求項10】
前記第一部材の歪量を検出する歪検出器を更に備え、
前記表示制御部は、
前記歪検出器が検出した歪量に基づき、前記目標位置マークを示す目標マスに隣接する目標隣接マスから、前記目標マスに相対移動させた前記画像を前記表示部に表示させることを特徴とする請求項2から4の何れかに記載のミシン。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ミシンに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
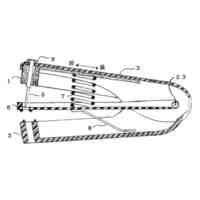
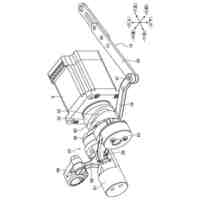
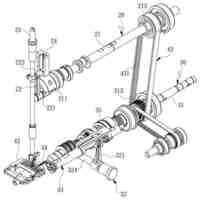
特許文献1のミシンは、ミシンフレーム、主軸、針棒、ループ捕捉器固定軸、ループ捕捉器、ループ捕捉器位置調節部材、及びループ捕捉器位置検知手段を備える。ループ捕捉器固定軸は、ミシンフレームへ回転又は揺動自在に支持され、主軸に伝達機構を介して連結される。ループ捕捉器は、ループ捕捉器固定軸に固定され、針棒の上下動に伴って形成される針糸ループを捕捉するループ捕捉部を有する。ループ捕捉器位置調節部材は、針棒下端に装着可能である。ループ捕捉器位置検知手段は、ループ捕捉器位置調節部材とループ捕捉器のループ捕捉部との接触状態を検知可能である。作業者は、ループ捕捉器がループ捕捉器固定軸に接触した状態を、ループ捕捉器位置検知手段により確認することで、ループ捕捉器の位置合わせを行う。
【先行技術文献】
【特許文献】
【0003】
特開2001-25594号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のミシンでは、ループ捕捉器とループ捕捉器固定軸とを相対的に近づけて、接触させる操作を行う場合の操作が適切に行われているかがわかりにくい。
【0005】
本発明の目的は、ミシンの第一部材と第二部材との相対位置を、操作ダイヤルを操作して調整が可能なミシンにおいて、操作ダイヤルが適切に操作されているかを判別することに貢献するミシンを提供することである。
【課題を解決するための手段】
【0006】
本発明の請求項1に係るミシンは、第一部材に対する第二部材の相対位置を調整可能なミシンにおいて、第一回転方向と、前記第一回転方向とは逆の第二回転方向との各々に回転操作可能な操作ダイヤルであって、前記操作ダイヤルの回転量と回転方向とに応じて前記第一部材に対する前記第二部材の前記相対位置を調整可能な前記操作ダイヤルと、前記操作ダイヤルの少なくとも前記回転方向を検出可能な検出器と、前記第一部材に対する前記第二部材の前記相対位置を表す画像であって、前記第一部材に対する前記第二部材の目標位置を示す目標位置マークと、前記第一部材に対する前記第二部材の初期位置と前記目標位置とを含む、前記第一部材に対する前記第二部材の移動可能範囲と、前記検出器が検出した前記回転方向に応じて、前記第一部材に対する前記第二部材の前記相対位置が前記目標位置に近づいたかを前記移動可能範囲上に示す現在位置マークとを含む前記画像を表示部に表示する表示制御部とを備える。ミシンは、表示部に表示された画像を表示することで、第一部材に対する第二部材の相対位置の調整作業を行う作業者が、第一部材に対する第二部材の相対位置を意図した位置とするのに適切な方向に操作ダイヤルを操作できているか否かを容易に確認することに貢献する。
【0007】
本発明の請求項2に係るミシンにおいて、前記移動可能範囲は、複数のマスで表され、前記目標位置マークは、前記複数のマスの内の何れかにより示される。ミシンは、作業者が表示部に表示された画像により移動可能範囲中の目標位置を把握しやすくすることに貢献する。
【0008】
本発明の請求項3に係るミシンにおいて、前記検出器は、前記操作ダイヤルの前記回転方向及び前記回転量を検出可能であり、前記表示制御部は、前記検出器が検出した前記回転方向及び前記回転量に応じて、前記移動可能範囲に対する前記現在位置マークの表示位置を変更し、前記複数のマスの内の前記初期位置のマスである初期マスから、前記初期マスに隣接する第一隣接マスに前記現在位置マークを相対移動させる際の前記検出器が検出する前記操作ダイヤルの回転量は、前記第一隣接マスから、前記初期マスとは別に前記第一隣接マスに隣接する第二隣接マスに前記現在位置マークを相対移動させる際の前記検出器が検出する前記操作ダイヤルの回転量よりも小さい。ミシンは、初期マスから第一隣接マスに移動する場合の検出器が検出する操作ダイヤルの回転量を、第一隣接マスから第二隣接マスに移動する場合の検出器が検出する操作ダイヤルの回転量よりも小さくすることで、操作ダイヤルの操作開始しはじめた段階で、適切な方向に操作できているかを確認しやすくすることに貢献する。
【0009】
本発明の請求項4に係るミシンにおいて、前記第一隣接マスの幅は、前記第二隣接マスの幅より短い。ミシンは、作業者が操作ダイヤルの操作開始しはじめた段階で、適切な方向に操作できているかを確認しやすくすることと、画像に基づき操作ダイヤルの回転量に対する第一部材に対する第二部材の相対位置の変化を把握することとの両立することに貢献する。
【0010】
本発明の請求項5に係るミシンにおいて、前記検出器は、前記操作ダイヤルの前記回転方向及び前記回転量を検出可能であり、前記表示制御部は、前記検出器が検出した前記回転方向及び前記回転量に応じて、前記移動可能範囲に対する前記現在位置マークの表示位置を変更し、前記目標位置マークが位置するマスである目標マスと前記目標マスに隣接する第一目標隣接マスとの間で前記現在位置マークを相対移動する際の前記検出器が検出する前記操作ダイヤルの回転量は、前記第一目標隣接マスと前記目標マスとは別に前記第一目標隣接マスに隣接する第二目標隣接マスとの間で前記現在位置マークを相対移動させる際の前記検出器が検出する前記操作ダイヤルの回転量よりも小さい。ミシンは、現在位置マークが目標マスの近傍にある場合に、操作ダイヤルに回転量に応じた現在位置マークの移動量を、目標マスから離れた位置に比べ敏感にすることで、作業者が、表示部に表示された現在位置マークを目標マスに合わせやすくすることに貢献する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
下糸連続供給装置
28日前
株式会社バルダン
ミシン
1か月前
JUKI株式会社
ミシン
26日前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ボビン
1か月前
個人
縫製方法
3か月前
ブラザー工業株式会社
縫製装置
1か月前
個人
ニードルパンチ針を使用した仮留め器具
1か月前
ブラザー工業株式会社
糸巻回装置
1か月前
JUKI株式会社
ミシンの布押え
1か月前
ブラザー工業株式会社
糸巻回装置
1か月前
株式会社PEGASUS
偏平縫いミシンの送り装置
1か月前
株式会社PEGASUS
偏平縫いミシンの押え装置
1か月前
JUKI株式会社
ミシン
3か月前
KLASS株式会社
畳縫着装置
2か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
取得装置及び二本針ミシン
1か月前
JUKI株式会社
ミシン
1か月前
星鋭縫じん機股ふん有限公司
ミシン
3か月前
ブラザー工業株式会社
ミシン及びミシン制御方法
2か月前
JUKI株式会社
ゴム繋ぎ装置
1か月前
ブラザー工業株式会社
移動検出装置及び縫製システム
1か月前
JUKI株式会社
差動送りミシン
1か月前
JUKI株式会社
縫製管理システム
3か月前
株式会社TOK
ミシンの点検時安全装置
1か月前
ブラザー工業株式会社
縫製支援方法、縫製支援プログラム、記憶媒体及び縫製装置
1か月前
ブラザー工業株式会社
縫製支援方法、縫製支援プログラム、記憶媒体及び縫製装置
1か月前
ブラザー工業株式会社
制御パラメータ生成方法、制御パラメータ生成プログラム及び記憶媒体
1か月前
デュルコップ アドラー ゲーエムベーハー
ミシン、そのようなミシンを有する縫製ユニット及びミシンの操作方法
19日前
インティヴァ プロダクツ, エルエルシー
ロボット縫製アセンブリの為の旋回式下部アーム
1か月前
他の特許を見る








 特許ウォッチ
特許ウォッチ