TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154110
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056927
出願日
2024-03-29
発明の名称
制御パラメータ生成方法、制御パラメータ生成プログラム及び記憶媒体
出願人
ブラザー工業株式会社
代理人
個人
,
個人
主分類
D05B
69/18 20060101AFI20251002BHJP(縫製;刺しゅう;タフティング)
要約
【課題】搬送装置のモータを制御するための制御パラメータを低負荷で算出することができる制御パラメータ生成方法、制御パラメータ生成プログラム及び記憶媒体を提供する。
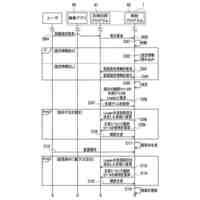
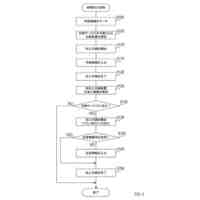
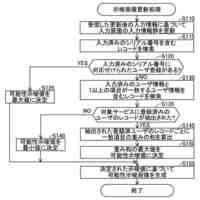
【解決手段】保持機構を移動するYモータにスイーブ正弦波信号を入力する。Yモータのモータ速度の実測値をエンコーダにより取得する。また、数式モデルに基づき、Yモータの速度の推定値を求める。モータ速度の実測値と推定値との差が小さくなるように、Yモータのイナーシャを逐次最小二乗法により算出する(S12)。あらかじめ作成した質量とイナーシャとの関係の近似式に、算出したイナーシャを適用し、保持機構の質量を求め(S13)、速度閉ループ伝達関数に基づいて制御ゲインを算出し(S17)、制御パラメータとする(S19)。
【選択図】図6
特許請求の範囲
【請求項1】
モータと、前記モータを制御するモータ制御装置と、前記モータが発生する動力を搬送対象に伝達する伝達機構とを備え、前記搬送対象を搬送する搬送装置において、前記モータ制御装置が使用する制御パラメータを前記搬送対象の質量に応じて生成する制御パラメータ生成方法であって、
時間経過に伴い信号値の周波数が変化する時間特性を有するスイープ信号を前記モータに入力し、前記モータのモータ速度と経過時間との特性を取得する時間特性取得工程と、
取得した前記モータ速度に対して絶対値化とローパスフィルタを適用した加工速度を算出する速度加工工程と、
前記スイープ信号の入力を開始してから所定の待機時間の経過以降に取得した前記経過時間毎の前記モータ速度の前記加工速度の最小値を算出し、前記最小値が極小値を最初に示した第一時刻と前記極小値とを取得する極小値取得工程と、
前記待機時間の経過以降、前記極小値が取得された前記第一時刻までの期間に取得された前記モータ速度と数式モデルとに基づいて、前記モータのイナーシャを算出するイナーシャ算出工程と、
算出された前記イナーシャと近似式とに基づき、前記搬送対象の前記質量を算出する質量算出工程と、
算出された前記搬送対象の前記質量に基づいて、前記制御パラメータを算出するパラメータ算出工程と
を備えることを特徴とする制御パラメータ生成方法。
続きを表示(約 2,800 文字)
【請求項2】
前記イナーシャ算出工程では、前記モータ速度と、予め前記数式モデルから求めたモータ速度推定値との差が小さくなるように、逐次最小二乗法を用いて前記イナーシャを算出すること
を特徴とする請求項1に記載の制御パラメータ生成方法。
【請求項3】
前記質量算出工程で算出した前記搬送対象の前記質量を提示する質量提示工程と、
提示された前記質量が適切であるか否かの判定の入力を受け付ける判定入力工程と
を更に備え、
前記質量が適切でないとの判定が入力された場合、前記パラメータ算出工程による前記制御パラメータの算出を中止すること
を特徴とする請求項1又は2に記載の制御パラメータ生成方法。
【請求項4】
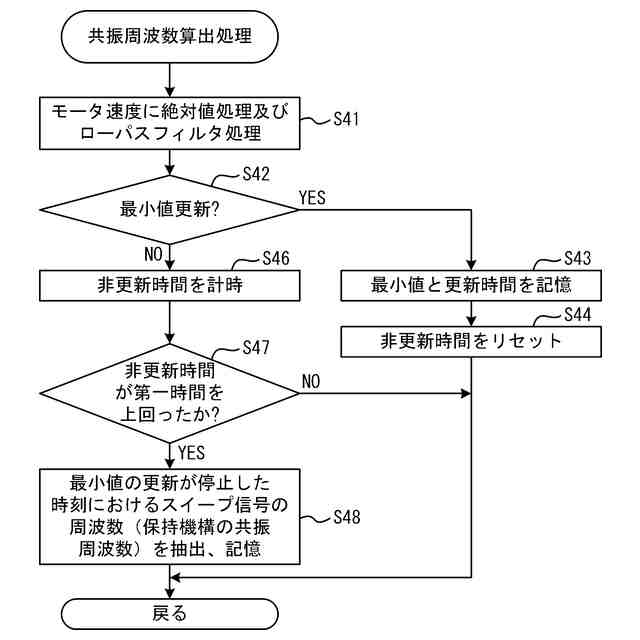
前記スイープ信号の前記時間特性に基づき、前記加工速度が前記極小値となる前記第一時刻において前記モータに入力されている周波数を算出し、前記搬送対象の共振周波数として取得する共振周波数取得工程を更に備え、
前記パラメータ算出工程は、
算出された前記搬送対象の共振周波数と前記質量とに基づいて、前記制御パラメータを算出すること
を特徴とする請求項1に記載の制御パラメータ生成方法。
【請求項5】
前記スイープ信号の入力を開始してから前記待機時間の経過以降に取得した前記経過時間毎の前記モータ速度の前記加工速度の最大値を算出し、前記最大値が極大値を最初に示した第二時刻と前記極大値とを取得する極大値取得工程と、
前記スイープ信号の前記時間特性に基づき、前記加工速度が前記極大値となる前記第二時刻において前記モータに入力されている周波数を算出し、前記モータの共振周波数として取得するモータ共振周波数取得工程と
を更に備え、
前記パラメータ算出工程は、
算出された前記搬送対象の共振周波数と前記モータの共振周波数と前記質量とに基づいて、前記制御パラメータを算出すること
を特徴とする請求項4に記載の制御パラメータ生成方法。
【請求項6】
前記極小値取得工程は、前記モータ速度の前記加工速度の前記最小値を逐次算出して、最も小さい値を更新し、所定の第一時間を越えて更新されない値を前記極小値とすること
を特徴とする請求項1又は4に記載の制御パラメータ生成方法。
【請求項7】
前記極小値取得工程は、前記モータ速度の前記加工速度の前記最小値を逐次算出して、最も小さい値を更新し、所定の第一時間を越えて更新されない値を前記極小値とし、
前記極大値取得工程は、前記モータ速度の前記加工速度の前記最大値を逐次算出して、最も大きい値を更新し、所定の第二時間を越えて更新されない値を前記極大値とし、
前記第一時刻から前記第一時間が経過した場合に、前記極大値を初期化する極大値初期化工程と、
前記第二時刻から前記第二時間が経過した場合に、前記極小値を初期化する極小値初期化工程と、
を更に備えること
を特徴とする請求項5に記載の制御パラメータ生成方法。
【請求項8】
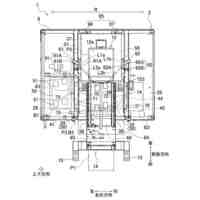
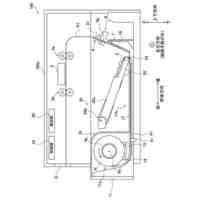
前記搬送装置は縫製装置に用いられるものであって、
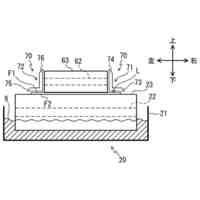
前記搬送対象は、被縫製物を保持した保持機構であり、
前記伝達機構は、針棒を駆動する針棒機構に対して前記保持機構を相対的に移動する送り機構であり、
前記モータは、前記送り機構を駆動するモータであること
を特徴とする請求項1に記載の制御パラメータ生成方法。
【請求項9】
モータと、前記モータを制御するモータ制御装置と、前記モータが発生する動力を搬送対象に伝達する伝達機構とを備え、前記搬送対象を搬送する搬送装置において、前記モータ制御装置が使用する制御パラメータを前記搬送対象の質量に応じて生成する制御パラメータ生成プログラムであって、
前記搬送装置のコンピュータに、
時間経過に伴い信号値の周波数が変化する時間特性を有するスイープ信号を前記モータに入力し、前記モータのモータ速度と経過時間との特性を取得する時間特性取得ステップと、
取得した前記モータ速度に対して絶対値化とローパスフィルタを適用した加工速度を算出する速度加工ステップと、
前記スイープ信号の入力を開始してから所定の待機時間の経過以降に取得した前記経過時間毎の前記モータ速度の前記加工速度の最小値を算出し、前記最小値が極小値を最初に示した第一時刻と前記極小値とを取得する極小値取得ステップと、
前記待機時間の経過以降、前記極小値が取得された前記第一時刻までの期間に取得された前記モータ速度と数式モデルとに基づいて、前記モータのイナーシャを算出するイナーシャ算出ステップと、
算出された前記イナーシャと近似式とに基づき、前記搬送対象の前記質量を算出する質量算出ステップと、
算出された前記搬送対象の前記質量に基づいて、前記制御パラメータを算出するパラメータ算出ステップと
を実行させることを特徴とする制御パラメータ生成プログラム。
【請求項10】
モータと、前記モータを制御するモータ制御装置と、前記モータが発生する動力を搬送対象に伝達する伝達機構とを備え、前記搬送対象を搬送する搬送装置において、前記モータ制御装置が使用する制御パラメータを前記搬送対象の質量に応じて生成させるため、
前記搬送装置のコンピュータに、
時間経過に伴い信号値の周波数が変化する時間特性を有するスイープ信号を前記モータに入力し、前記モータのモータ速度と経過時間との特性を取得する時間特性取得ステップと、
取得した前記モータ速度に対して絶対値化とローパスフィルタを適用した加工速度を算出する速度加工ステップと、
前記スイープ信号の入力を開始してから所定の待機時間の経過以降に取得した前記経過時間毎の前記モータ速度の前記加工速度の最小値を算出し、前記最小値が極小値を最初に示した第一時刻と前記極小値とを取得する極小値取得ステップと、
前記待機時間の経過以降、前記極小値が取得された前記第一時刻までの期間に取得された前記モータ速度と数式モデルとに基づいて、前記モータのイナーシャを算出するイナーシャ算出ステップと、
算出された前記イナーシャと近似式とに基づき、前記搬送対象の前記質量を算出する質量算出ステップと、
算出された前記搬送対象の前記質量に基づいて、前記制御パラメータを算出するパラメータ算出ステップと
を実行させるプログラムを記憶することを特徴とする記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送装置のモータを制御するための制御パラメータ生成方法、制御パラメータ生成プログラム及び記憶媒体に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1には、機械の駆動機構を含めたモータ制御のための機械化モデルが開示されている。特許文献1の指令発生器は、掃引正弦波信号を作成し、電流制御器に送ってモータを動作させる。検出器は、機械の動作量の情報を含んだモータ動作量を検出し、応答信号として信号処理器に送る。応答信号は機械の周波数に依存した共振特性を持つ。信号処理器は、応答信号の絶対値が最大となる時間と振幅を検出し、掃引正弦波信号の時間と周波数の関係に基づき、機械の共振周波数を検出する。
【先行技術文献】
【特許文献】
【0003】
特開2003-348871号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、電流制御器に掃引正弦波信号の全周波数が入力され、それに応じて動作するモータ動作量の時系列における全時間分の応答信号が取得されてグラフ化され、極大値及び極小値が特定されることによって、機械の共振周波数が算出される。このため、時系列における全時間分の応答信号を記憶するために大きなメモリ容量が必要であり、且つ、応答信号の全データを照会して共振周波数を検出するための演算負荷がかかるという問題があった。
【0005】
本発明の目的は、搬送装置のモータを制御するための制御パラメータを低負荷で算出することができる制御パラメータ生成方法、制御パラメータ生成プログラム及び記憶媒体を提供することである。
【課題を解決するための手段】
【0006】
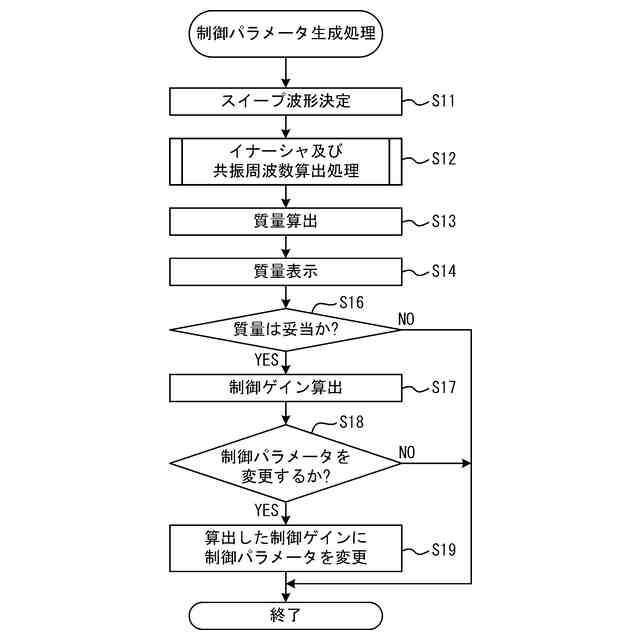
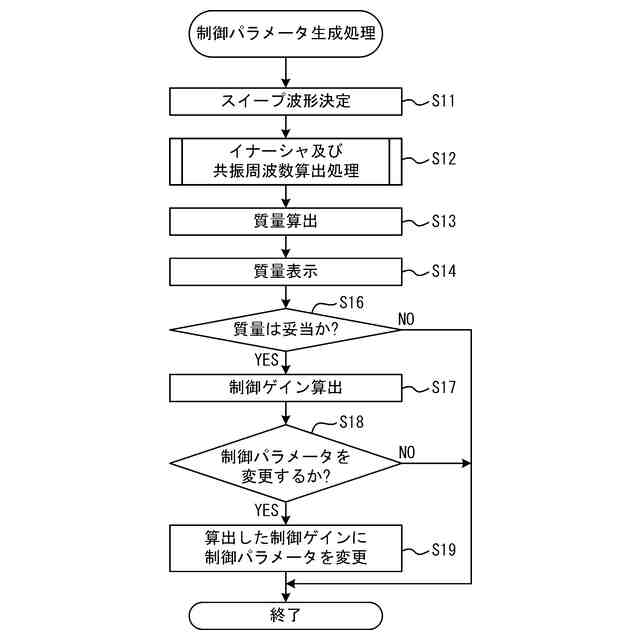
本発明の第一態様によれば、モータと、前記モータを制御するモータ制御装置と、前記モータが発生する動力を搬送対象に伝達する伝達機構とを備え、前記搬送対象を搬送する搬送装置において、前記モータ制御装置が使用する制御パラメータを前記搬送対象の質量に応じて生成する制御パラメータ生成方法であって、時間経過に伴い信号値の周波数が変化する時間特性を有するスイープ信号を前記モータに入力し、前記モータのモータ速度と経過時間との特性を取得する時間特性取得工程と、取得した前記モータ速度に対して絶対値化とローパスフィルタを適用した加工速度を算出する速度加工工程と、前記スイープ信号の入力を開始してから所定の待機時間の経過以降に取得した前記経過時間毎の前記モータ速度の前記加工速度の最小値を算出し、前記最小値が極小値を最初に示した第一時刻と前記極小値とを取得する極小値取得工程と、前記待機時間の経過以降、前記極小値が取得された前記第一時刻までの期間に取得された前記モータ速度と数式モデルとに基づいて、前記モータのイナーシャを算出するイナーシャ算出工程と、算出された前記イナーシャと近似式とに基づき、前記搬送対象の前記質量を算出する質量算出工程と、算出された前記搬送対象の前記質量に基づいて、前記制御パラメータを算出するパラメータ算出工程とを備えることを特徴とする制御パラメータ生成方法が提供される。
【0007】
制御パラメータ生成方法では、モータ速度と経過時間との特性を逐次取得し、モータ速度の絶対値化とローパスフィルタの適用によって、加工速度を順次算出する。これにより、加工速度から最小値を算出できるようになるので、最初に極小値が得られた第一時刻までのモータ速度に基づき、モータのイナーシャを算出する。そしてイナーシャから搬送対象の質量を算出することで、モータの制御パラメータを算出する。このように、制御パラメータ生成方法は、モータ速度と経過時間との特性を全期間に亘って取得し、取得終了後に、期間中の全特性に基づいてパラメータを算出する場合と比べ、使用メモリの容量が少なく、演算負荷も小さくて済むので、安価なハードウェアで実現できる。
【0008】
第一態様において、前記イナーシャ算出工程では、前記モータ速度と、予め前記数式モデルから求めたモータ速度推定値との差が小さくなるように、逐次最小二乗法を用いて前記イナーシャを算出してもよい。制御パラメータ生成方法は、イナーシャの算出を、逐次最小二乗法を用いて都度行うことで、モータ速度が得られる度にそれまでにモータ速度を用いて1から全部演算する場合と比べ、使用メモリの容量が少なく、演算負荷も小さくて済むので、安価なハードウェアで実現できる。
【0009】
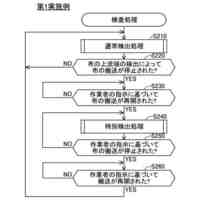
第一態様において、前記質量算出工程で算出した前記搬送対象の前記質量を提示する質量提示工程と、提示された前記質量が適切であるか否かの判定の入力を受け付ける判定入力工程とを更に備え、前記質量が適切でないとの判定が入力された場合、前記パラメータ算出工程による前記制御パラメータの算出を中止してもよい。制御パラメータ生成方法では、ユーザにより質量の算出結果が適切か否かの判定を受けることで、例えば外乱等により搬送対象の質量とは大きく異なる質量が算出された場合に、その質量に基づく制御パラメータの算出を中止することができ、モータが不適切なパラメータで制御されることを抑制できる。
【0010】
第一態様において、前記スイープ信号の前記時間特性に基づき、前記加工速度が前記極小値となる前記第一時刻において前記モータに入力されている周波数を演算し、前記搬送対象の共振周波数として取得する共振周波数取得工程を更に備え、前記パラメータ算出工程は、算出された前記搬送対象の共振周波数と前記質量とに基づいて、前記制御パラメータを算出してもよい。算出された搬送対象の共振周波数は、モータの反共振周波数に対応することが予め判明している。故に制御パラメータ生成方法では、例えば、モータ速度の閉ループのゲイン特性が搬送対象の共振周波数において減衰するように制御パラメータを算出することで、搬送対象の共振を抑制し、搬送対象が安定して搬送されるようにしたモータの制御を実現できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ブラザー工業株式会社
電子機器
20日前
ブラザー工業株式会社
印刷装置
1か月前
ブラザー工業株式会社
印刷装置
26日前
ブラザー工業株式会社
水塗布装置
12日前
ブラザー工業株式会社
水塗布装置
12日前
ブラザー工業株式会社
水塗布装置
12日前
ブラザー工業株式会社
水塗布装置
12日前
ブラザー工業株式会社
画像形成装置
17日前
ブラザー工業株式会社
液体吐出装置
5日前
ブラザー工業株式会社
画像形成装置
25日前
ブラザー工業株式会社
画像形成装置
25日前
ブラザー工業株式会社
画像形成装置
25日前
ブラザー工業株式会社
画像形成装置
25日前
ブラザー工業株式会社
シート給送装置
19日前
ブラザー工業株式会社
サポートプログラム
25日前
ブラザー工業株式会社
サポートプログラム
25日前
ブラザー工業株式会社
定着装置及び画像形成装置
17日前
ブラザー工業株式会社
プリンタおよびプログラム
27日前
ブラザー工業株式会社
プリンタおよびプログラム
27日前
ブラザー工業株式会社
インクジェット記録方法及び印刷物
1か月前
ブラザー工業株式会社
サポートプログラムおよび印刷システム
5日前
ブラザー工業株式会社
印刷管理システム、サーバ、印刷管理方法
12日前
ブラザー工業株式会社
プログラム、電子装置、方法、及び印刷システム
10日前
ブラザー工業株式会社
情報処理プログラム、情報処理装置、及び情報処理方法
12日前
ブラザー工業株式会社
プログラム、データ処理装置、および、データ処理方法
27日前
ブラザー工業株式会社
プリンタ
1か月前
ブラザー工業株式会社
カセット
1か月前
ブラザー工業株式会社
通信システム、サーバ、および、コンピュータプログラム
25日前
ブラザー工業株式会社
画像形成装置
1か月前
ブラザー工業株式会社
画像形成装置
4日前
ブラザー工業株式会社
現像カートリッジ
10日前
ブラザー工業株式会社
サポートプログラム
10日前
ブラザー工業株式会社
サポートプログラム
10日前
ブラザー工業株式会社
コンピュータプログラム、データ処理装置、および、シートの製造方法
12日前
ブラザー工業株式会社
タンクセット及び液体消費装置
17日前
ブラザー工業株式会社
情報処理プログラム、情報処理装置、情報処理方法、印刷プログラム、印刷装置、及び印刷方法
27日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ