TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165904
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2025069329
出願日
2025-04-21
発明の名称
ミシン、そのようなミシンを有する縫製ユニット及びミシンの操作方法
出願人
デュルコップ アドラー ゲーエムベーハー
代理人
個人
,
個人
主分類
D05B
29/02 20060101AFI20251028BHJP(縫製;刺しゅう;タフティング)
要約
【課題】異なる厚さ及び/又は異なる層数のワークピースを柔軟な方法で正確に縫製できるようなミシンを開発する。
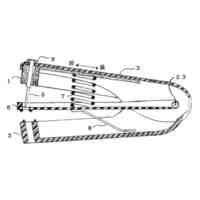
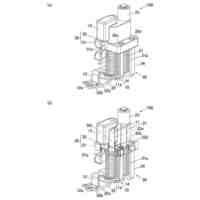
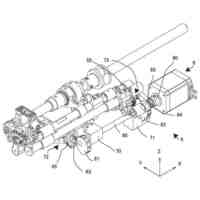
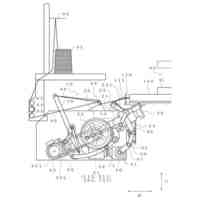
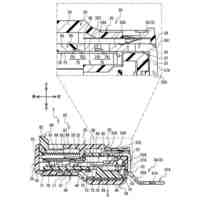
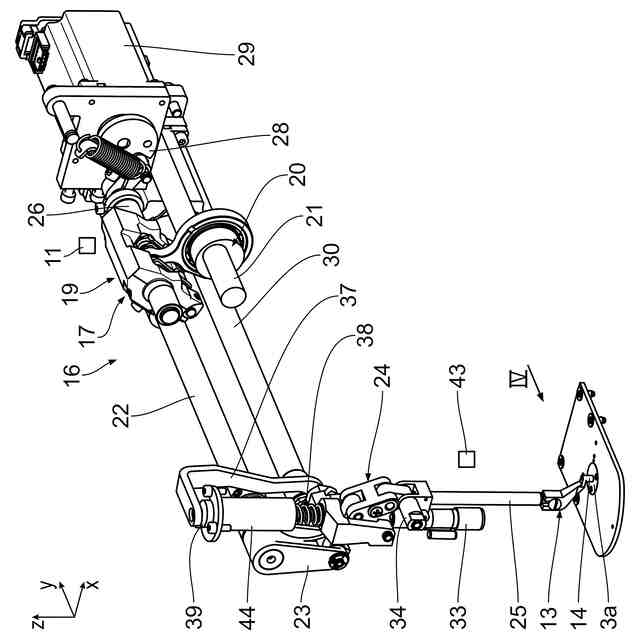
【解決手段】ミシンは、針板(3a)と、縫製手順中に針板(3a)上のワークピースを押さえるためのストローク移動を行うためのワークピース押え足(13)とを有する。従動ストローク振幅調整装置(17)は、ワークピース押え足のストローク移動のストローク振幅を上死点と下死点との間に設定する役割を果たす。従動ストロークレベル調整装置は、針板(3a)に対するワークピース押え足(13)のストローク移動のストロークレベルを設定する役割を果たす。制御/調整装置(11)は、ストローク振幅調整装置(17)及びストロークレベル調整装置と信号通信している。さらに、ミシンで可能な操作方法が提供される。これにより、異なる厚さ及び/又は異なる層数のワークピースを柔軟な方法で正確に縫製することができるミシンが得られる。
【選択図】図2
特許請求の範囲
【請求項1】
-針板(3a)と、
-縫製手順中に前記針板(3a)上のワークピース(NG)を押さえるためのストローク移動を行うように設計されているワークピース押え足(13)と、
-上死点(A,C,E)と下死点(B,D,F)との間の前記ワークピース押え足(13)の前記ストローク移動のストローク振幅(HA=X、HA=Y)を設定するための従動ストローク振幅調整装置(17)と、
-前記針板(3a)に対する前記ワークピース押え足(13)の前記ストローク移動のストロークレベル(HN)を設定するための従動ストロークレベル調整装置(18)と、
-前記ストローク振幅調整装置(17)及び前記ストロークレベル調整装置(18)と信号通信する制御/調整装置(11)と、
を有するミシン(2)。
続きを表示(約 2,300 文字)
【請求項2】
前記ステッチプレート(3a)上の前記ワークピース押え足(13)の実際のストローク位置を検出するためのセンサ(43)を備えることを特徴とする、請求項1に記載のミシン。
【請求項3】
前記ワークピース押え足(13)のための架台を備え、前記ワークピース押え足(13)が前記架台のばね(38)によって取付け位置に予圧されていることを特徴とする、請求項1又は2に記載のミシン。
【請求項4】
前記ばね(38)の予圧力を設定するための設定装置を備えることを特徴とする、請求項3に記載のミシン。
【請求項5】
請求項1乃至4のいずれか一項に記載のミシン(2)を有する縫製ユニット(1)。
【請求項6】
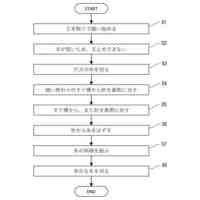
請求項1乃至4のいずれか一項に記載のミシンを操作する方法であって、
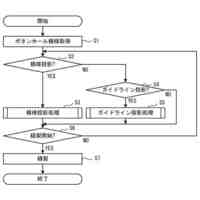
-前記ストローク振幅調整装置(17)により、ストローク振幅(HA)を指定するステップと、
-目標ストロークレベル(HN
Soll
)を指定するステップと、
-前記指定されたストローク振幅(HA)の場合に生じる実際のストロークレベル(HN
Ist
)を検出するステップと、
-前記実際のストロークレベル(HN
Ist
)と前記目標ストロークレベル(HN
Soll
)の差が所定の許容限界値内に収まるまで、前記ストロークレベル調整装置(18)を調整するステップと、を含む方法。
【請求項7】
請求項1乃至4のいずれか一項に記載のミシンを操作する方法であって、
-前記ストロークレベル調整装置(18)により、ストロークレベル(HN)を指定するステップと、
-目標ストローク振幅(HA
Soll
)を指定するステップと、
-前記指定されたストロークレベル(HN)の場合に生じる実際のストローク振幅(HA
Ist
)を検出するステップと、
-前記実際のストローク振幅(HN
Ist
)と前記目標ストローク振幅(HN
Soll
)の差が所定の許容限界値内に収まるまで、ストローク振幅調整装置(17)を調整するステップと、を含む方法。
【請求項8】
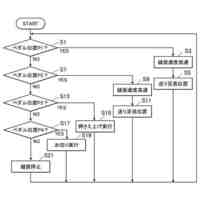
請求項1乃至4のいずれか一項に記載のミシンを操作する方法であって、
-前記ストロークレベル調整装置(18)により、第1ストロークレベル(HN1)を指定するステップと、
-前記ストローク振幅調整装置(17)により、ストローク振幅(HA)を指定するステップと、
-前記第1ストロークレベル(HN1)とストローク振幅(HA)で、前記ミシン(2)を第1縫製経路に沿って作動させるステップと、
-前記ストロークレベル調整装置(18)により、前記第1ストロークレベル(HN1)とは異なる、さらなるストロークレベル(HN2)を指定するステップと、
-前記さらなるストロークレベル(HN2)と前記ストローク振幅(HA)で、前記ミシン(2)をさらなる縫製経路に沿って作動させるステップと、を含む方法。
【請求項9】
請求項1乃至4のいずれか一項に記載のミシン(2)を操作する方法であって、
-前記ストロークレベル調整装置(18)により、第1ストロークレベル(HN1)を指定するステップと、
-前記ストローク振幅調整装置(17)により、第1ストローク振幅(HA=Y)を指定するステップと、
-第1縫製経路に沿って、前記第1ストロークレベル(HN1)及び前記第1ストローク振幅(Y)でミシン(2)を作動させるステップと、
-前記ストロークレベル調整装置(18)により、前記第1ストロークレベル(HN1)とは異なる、さらなるストロークレベル(HN2)を指定するステップと、
-前記ストローク振幅調整装置(17)により、前記第1ストローク振幅(Y)とは異なる、さらなるストローク振幅(HA=X)を指定するステップであって、前記さらなるストロークレベル(HN2)及び/又は前記さらなるストローク振幅(X)の指定は、指定されたストローク振幅(Y、X)とは無関係に、前記ワークピース押え足(13)の下死点(B、F)のストローク位置が、所定の許容限界値内で一定に維持されるように行われるステップと、
-前記さらなるストロークレベル(HN2)及び前記さらなるストローク振幅(X)で、さらなる縫製経路に沿ってミシン(2)を作動させるステップと、
を含む方法。
【請求項10】
請求項1乃至4のいずれか一項に記載のミシン(2)を操作する方法であって、
-前記ストロークレベル調整装置(18)により、少なくとも1つのストロークレベル(HN)を指定するステップと、
-前記ストローク振幅調整装置(17)により、少なくとも1つのストローク振幅(HA)を指定するステップと、
-前記少なくとも1つのストロークレベル(HN)と前記少なくとも1つのストローク振幅(HA)で、前記ミシン(2)を少なくとも1つの縫製経路に沿って作動させるステップと、
-作動後に前記ストロークレベル調整装置(18)により、前記ワークピース押え足(13)を持ち上げ、前記ワークピースを取り外すステップと、を含む方法。
発明の詳細な説明
【技術分野】
【0001】
本発明はミシンに関する。さらに、本発明は、そのようなミシンを有する縫製ユニット、及びそのようなミシンを操作する方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
ミシンは、特許文献1及び特許文献2から知られている。ミシンを有する縫製ユニットは、特許文献3から知られている。
【先行技術文献】
【特許文献】
【0003】
EP 3 556 923 B1
EP 3 088 591 B1
EP 3 088 587 B1
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、異なる厚さ及び/又は異なる層数のワークピースを柔軟な方法で正確に縫製できるようなミシンを開発することである。
【課題を解決するための手段】
【0005】
本発明によれば、この目的は、請求項1に記載された特徴を有するミシンによって達成される。
【0006】
本発明によれば、従動ストローク(又は持ち上げ)振幅調整装置と、従動ストローク(又は持ち上げ)レベル調整装置とを備えたミシンを設計することにより、ワークピース押え足のストローク振幅及びストロークレベルを、特に独立した方法でそれぞれ指定することが可能になることが認識されている。したがって、ミシンは、一方のストローク振幅調整装置と他方のストロークレベル調整装置によって、ワークピース押え足の、一方でストローク振幅と他方でストロークレベルを独立して指定できるように設計することができる。このような一方のストローク振幅の指定と他方のストロークレベルの指定は、独立した方法で行うことができる。縫製動作中のワークピース押え足のストローク経路は、非常に広範囲に指定することができる。ワークピース押え足の動き、すなわちワークピース押え足のストローク又は持ち上げ動作が、ミシンのステッチ形成ツールの動きと連動又は同期している限り、ワークピース押え足の断続的又は周期的なストローク又は持ち上げ動作が可能であり、これはそれぞれ調整された「ストローク振幅」及び「ストロークレベル」のパラメータに適合する。ストローク振幅調整装置は、特にカムディスクとして設計することができる持ち上げカム、及び/又は同様に特にカムディスクとして設計することができるプレートギアを備えることができる。ストロークレベル調整装置は、リフターカムを備えることができる。ワークピース押え足の押え動作は、ワークピースに対して押圧する形態をとることができる。代替的又は付加的に、ワークピース押え足の押え動作は、ワークピース押え足がワークピースに接触せず、単にワークピースがストローク寸法内において望ましくない形で上方に逸脱することを防止するように作用させることができる。
【0007】
ストローク振幅調整装置及び/又はストロークレベル調整装置の駆動装置は、ステッピングモータとして設計することができる。
【0008】
ワークピース押え足のストローク動作は、連続的及び/又は周期的な振動であってもよい。
【0009】
請求項2に記載のセンサは、ミシンのストローク駆動部の制御された動作を可能にし、このストローク駆動部は、ストローク振幅調整装置とストロークレベル調整装置とを備える。このセンサによって、特にワークピース押え足の構成部品から針板までの距離を測定することができる。特に、針板上のワークピース押え足の実際のストロークの直接測定が可能である。代替的に、このセンサによって、歯車、又は、ワークピース押え足のストローク変位中に使用される歯車又はこの歯車の構成要素の実際の位置を測定することができる。また、代替的に又は追加的に、ワークピース押え足の実際のストローク位置を検出するためのセンサとして、縫製駆動部用及び/又はストローク振幅調整装置の駆動部用及び/又はストロークレベル調整装置の駆動部用のエンコーダ、特にステッピングモータエンコーダを設けることができる。このセンサは、光学式センサ及び/又は静電容量式センサとして設計することができる。
【0010】
針板上のワークピース押え足の実際の位置は、ワークピース押え足によってワークピースが押されているときにセンサによって検出することができ、また、ワークピース押え足駆動装置のモータ電流を検出することによっても検出することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
下糸連続供給装置
1か月前
株式会社バルダン
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
ブラザー工業株式会社
ボビン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
株式会社広瀬製作所
全回転かま
今日
個人
縫製方法
3か月前
ブラザー工業株式会社
縫製装置
1か月前
個人
ニードルパンチ針を使用した仮留め器具
1か月前
JUKI株式会社
上下送りミシン
4か月前
ブラザー工業株式会社
糸巻回装置
1か月前
ブラザー工業株式会社
糸巻回装置
1か月前
JUKI株式会社
ミシンの布押え
1か月前
JUKI株式会社
ミシンの糸切り装置
5か月前
ブラザー工業株式会社
ミシンフレーム
4か月前
株式会社PEGASUS
偏平縫いミシンの送り装置
1か月前
株式会社PEGASUS
偏平縫いミシンの押え装置
1か月前
JUKI株式会社
被縫製物の位置決め装置
4か月前
JUKI株式会社
取得装置及び二本針ミシン
1か月前
KLASS株式会社
畳縫着装置
2か月前
JUKI株式会社
ミシン
3か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
2か月前
星鋭縫じん機股ふん有限公司
ミシン
4か月前
ブラザー工業株式会社
ミシン及びミシン制御方法
2か月前
JUKI株式会社
ゴム繋ぎ装置
1か月前
ブラザー工業株式会社
移動検出装置及び縫製システム
1か月前
JUKI株式会社
差動送りミシン
2か月前
JUKI株式会社
縫製管理システム
4か月前
株式会社TOK
ミシンの点検時安全装置
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
4か月前
ブラザー工業株式会社
縫製支援方法、縫製支援プログラム、記憶媒体及び縫製装置
1か月前
ブラザー工業株式会社
縫製支援方法、縫製支援プログラム、記憶媒体及び縫製装置
1か月前
ブラザー工業株式会社
制御パラメータ生成方法、制御パラメータ生成プログラム及び記憶媒体
1か月前
デュルコップ アドラー ゲーエムベーハー
ミシン、そのようなミシンを有する縫製ユニット及びミシンの操作方法
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ