TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101962
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219081
出願日
2023-12-26
発明の名称
ミシン
出願人
JUKI株式会社
代理人
個人
,
個人
主分類
D05B
27/02 20060101AFI20250701BHJP(縫製;刺しゅう;タフティング)
要約
【課題】被縫製物の位置合わせを確認可能な試し縫いを行うミシンを提供する。
【解決手段】縫い針11の上下動を行う針上下動機構と、被縫製物Cの送りを行う送り装置と、針上下動機構と送り装置の動作制御を行い、縫い針を被縫製物に届かない非縫製位置に滞留させて送り装置による被縫製物の送り動作を行う送り動作確認モードを実行可能な制御装置90と、作業者が針落ち指令を入力する針落ち指令入力部99とを備え、制御装置は、送り動作確認モードの実行中に、針落ち指令入力部から針落ち指令が入力されると、既定の針数の縫い合わせを行うように針上下動機構を制御する仮縫い機能を有する。
【選択図】図19
特許請求の範囲
【請求項1】
縫い針の上下動を行う針上下動機構と、
被縫製物の送りを行う送り装置と、
前記針上下動機構と前記送り装置の動作制御を行い、前記縫い針を前記被縫製物に届かない非縫製位置に滞留させて前記送り装置による被縫製物の送り動作を行う送り動作確認モードを実行可能な制御装置と、
作業者が針落ち指令を入力する針落ち指令入力部とを備え、
前記制御装置は、送り動作確認モードの実行中に、前記針落ち指令入力部から前記針落ち指令が入力されると、既定の針数の縫い合わせを行うように前記針上下動機構を制御する仮縫い機能を有することを特徴とするミシン。
続きを表示(約 1,000 文字)
【請求項2】
前記仮縫い機能の縫い合わせの針数を設定する針数設定部を備えることを特徴とする請求項1記載のミシン。
【請求項3】
糸切り装置を備え、
前記制御装置は、前記仮縫い機能による前記既定の針数の縫い合わせの終わりに前記糸切り装置による糸切りを行わせることを特徴とする請求項1記載のミシン。
【請求項4】
作業者が前記送り装置による送りを実行させる送り指令を入力するペダルを備え、
前記制御装置は、前記送り動作確認モードの実行中に、前記針落ち指令入力部から前記針落ち指令が入力され、前記ペダルから前記送り指令が入力されると、既定の針数の縫い合わせを行うように前記針上下動機構を制御することを特徴とする請求項1に記載のミシン。
【請求項5】
前記針上下動機構は、ミシンモータにより駆動し、
前記送り装置は、前記ミシンモータとは別の駆動源により駆動することを特徴とする請求項1に記載のミシン。
【請求項6】
縫製について設定を行う設定入力装置を備え、
前記送り装置は、針落ち位置の左右両側で前記被縫製物の送りを行い、
前記設定入力装置は、前記送り装置の前記針落ち位置の左側と前記針落ち位置の右側とについて差を設けて送り量を設定可能であることを特徴とする請求項5に記載のミシン。
【請求項7】
縫製について設定を行う設定入力装置を備え、
前記送り装置は、針落ち位置の前後両側で前記被縫製物の送りを行い、
前記設定入力装置は、前記送り装置の前記針落ち位置の前側と前記針落ち位置の後側とについて差を設けて送り量を設定可能であることを特徴とする請求項5に記載のミシン。
【請求項8】
縫製について設定を行う設定入力装置を備え、
前記送り装置は、前記被縫製物の上下両側で送りを行い、
前記設定入力装置は、前記被縫製物の下側と前記被縫製物の上側とについて差を設けて送り量を設定可能であることを特徴とする請求項5に記載のミシン。
【請求項9】
前記送り装置は、搬送ベルトにより前記被縫製物の送りを行うことを特徴とする請求項1から請求項5のいずれか一項に記載のミシン。
【請求項10】
前記送り装置は、搬送ベルトにより前記被縫製物の送りを行うことを特徴とする請求項6から請求項8のいずれか一項に記載のミシン。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ミシンに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来のミシンは、縫い針の上下動と被縫製物の送り動作とがいずれもミシンモータから動力を得ていることから針落ちと送りの同期を得ることが容易である反面、縫い針の上下動と被縫製物の送り動作とが連動して分離動作ができなかった(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2015/033996号
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来より、縫い針による針落ちを行わずに、専ら、被縫製物の送り動作を行う試し縫いを行いたいという要請がある。
そのためには、縫い針の上下動を停止又は縫い針が被縫製物に届かない程度に上下動の振幅を低減して専ら被縫製物の送り動作を行うことにより試し縫いを実現することが可能である。
しかしながら、針落ちを伴わない試し縫いの場合、試し縫い後の被縫製物が全く縫着されていないので、例えば、模様を合わせて縫い合わせる場合や、縫いの経路の随所でより正確に位置合わせが要求されるような仕様の縫製の場合に、それが実現できているかを確認することができなかった。
【0005】
本発明は、被縫製物の位置合わせを確認可能な試し縫いを行うことができるミシンを提供することをその目的とする。
【課題を解決するための手段】
【0006】
本発明は、ミシンにおいて、
縫い針の上下動を行う針上下動機構と、
被縫製物の送りを行う送り装置と、
前記針上下動機構と前記送り装置の動作制御を行い、前記縫い針を前記被縫製物に届かない非縫製位置に滞留させて前記送り装置による被縫製物の送り動作を行う送り動作確認モードを実行可能な制御装置と、
作業者が針落ち指令を入力する針落ち指令入力部とを備え、
前記制御装置は、送り動作確認モードの実行中に、前記針落ち指令入力部から前記針落ち指令が入力されると、既定の針数の縫い合わせを行うように前記針上下動機構を制御する仮縫い機能を有することを特徴とする。
【発明の効果】
【0007】
本発明のミシンは、上記構成により、被縫製物の位置合わせを確認可能な試し縫いを行うことが可能なミシンを提供することが可能となる。
【図面の簡単な説明】
【0008】
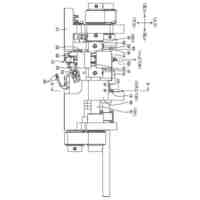
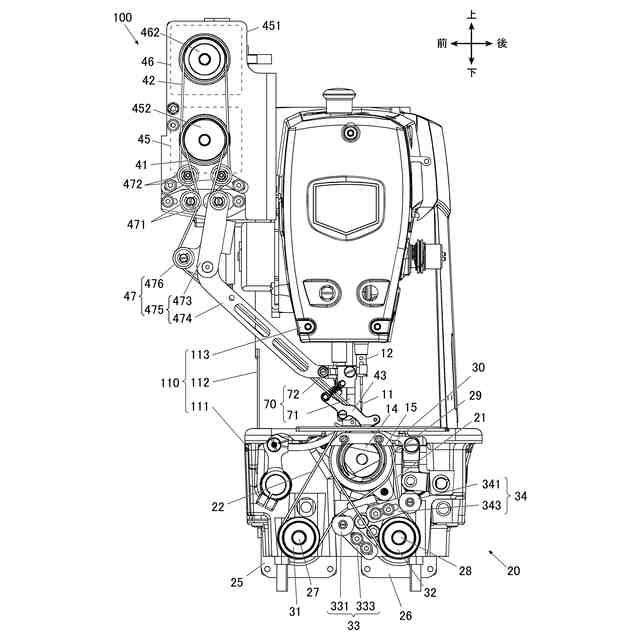
発明の実施形態であるミシンの後面図である。
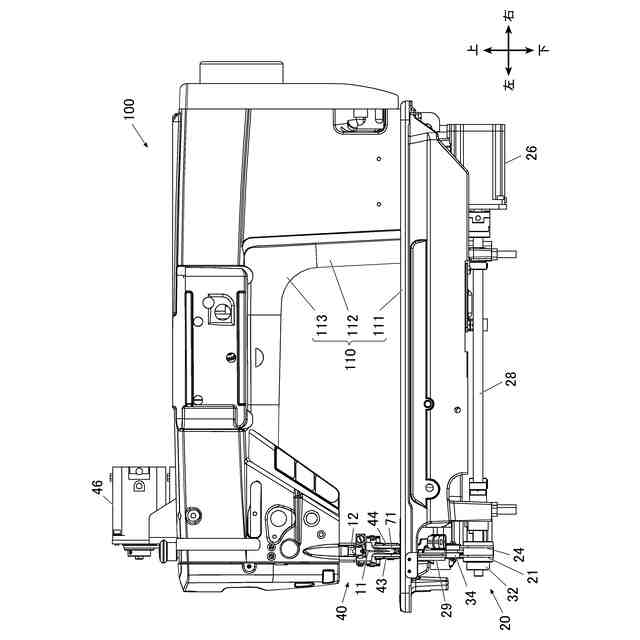
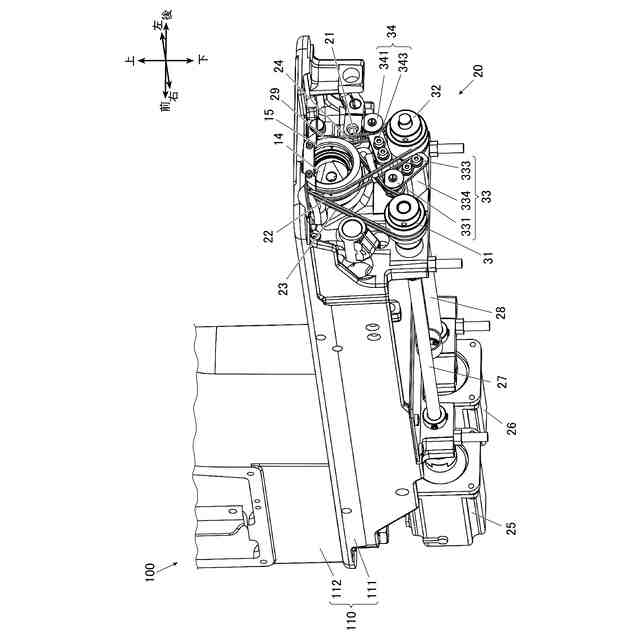
ミシンの左側面図である。
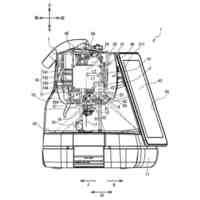
ミシンの斜視図である。
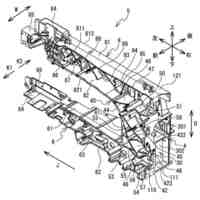
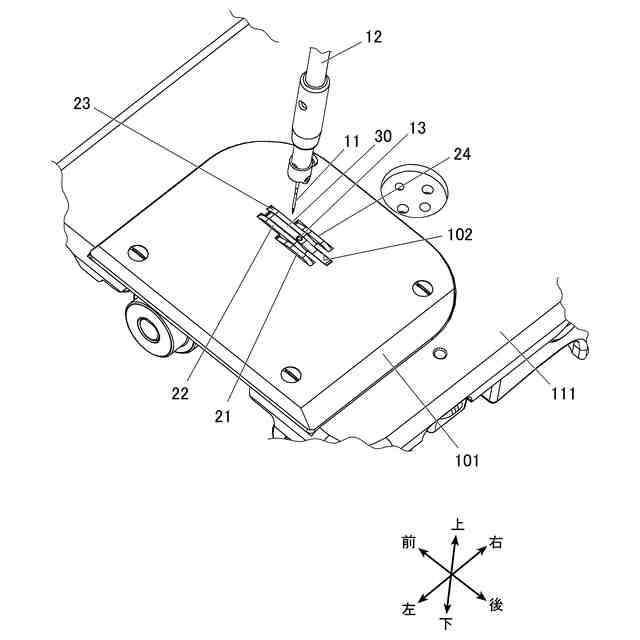
押さえ足の図示を省略したミシンベッド部の左端部上面を示す斜視図である。
下送り機構のガイド枠の斜視図である。
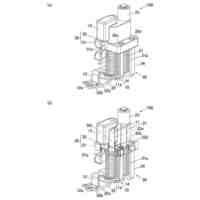
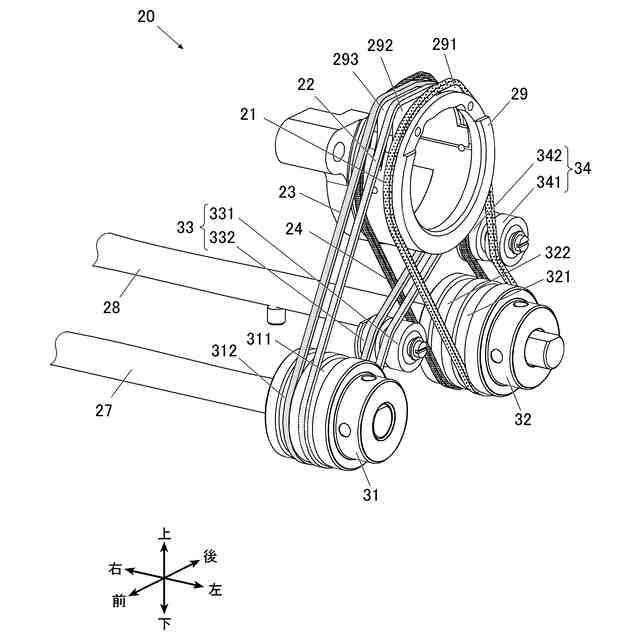
四本の搬送ベルトが前後差動送り状態にある送り機構の斜視図である。
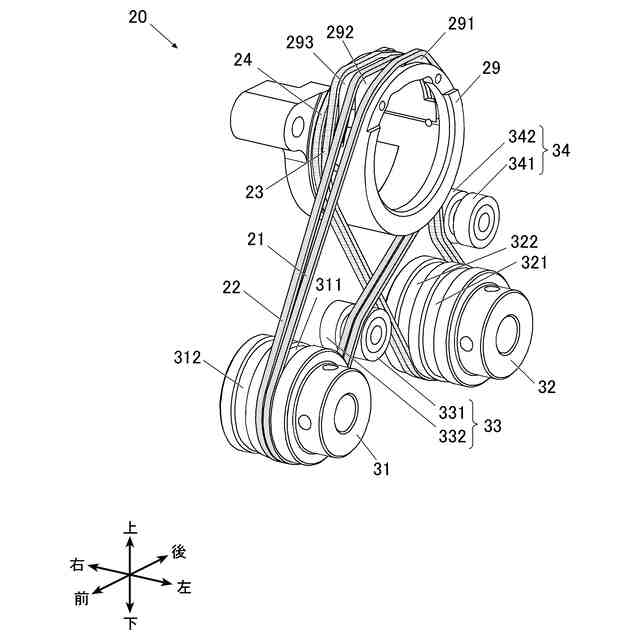
四本の搬送ベルトが左右差動送り状態にある送り機構の斜視図である。
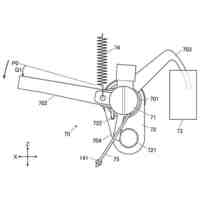
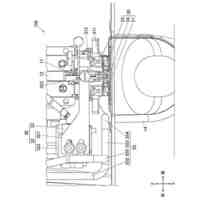
針板上で被縫製物を上から押さえる布押さえ機構周辺の斜視図である。
布押さえ機構周辺の後面図である。
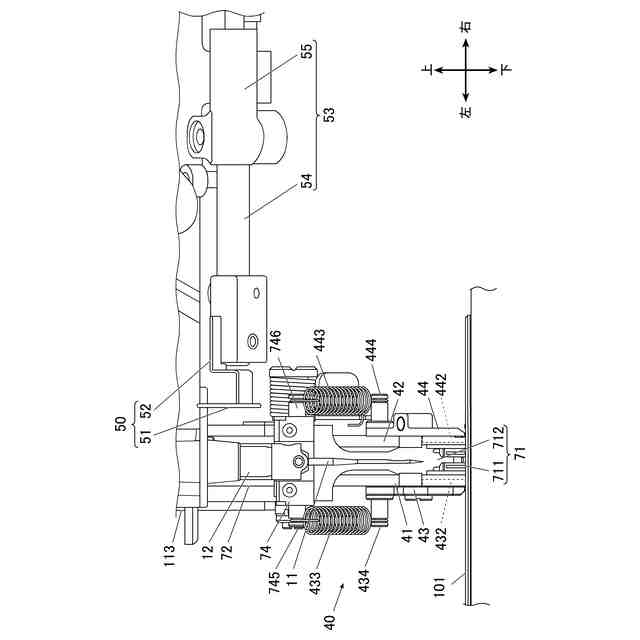
使用位置にある位置決め定規とその周辺構成の斜視図である。
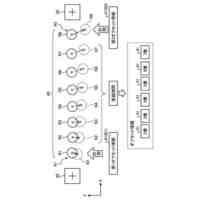
ミシンの制御系を示すブロック図である。
設定データを設定入力するために操作入力部の入力画面に表示される入力画面を示す。
設定データを設定入力するために操作入力部の入力画面に表示される他の入力画面を示す。
複数の設定データを連結設定するために操作入力部の入力画面に表示される設定画面を示す。
被縫製物に形成された指標としてのノッチを検出する撮像素子の例を示す説明図である。
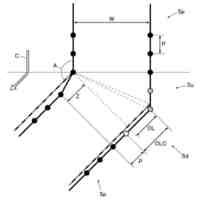
被縫製物の外形データが示す被縫製物の外縁形状を示している。
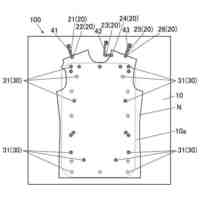
同じ模様を有し、模様合わせを行う二つの被縫製物を示した図である。
同じ模様を有し、模様合わせを行った被縫製物を示した図である。
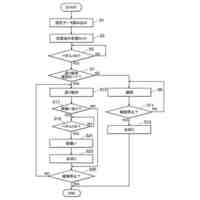
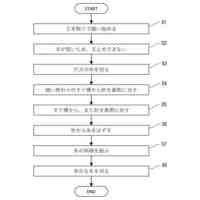
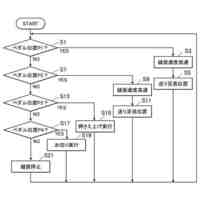
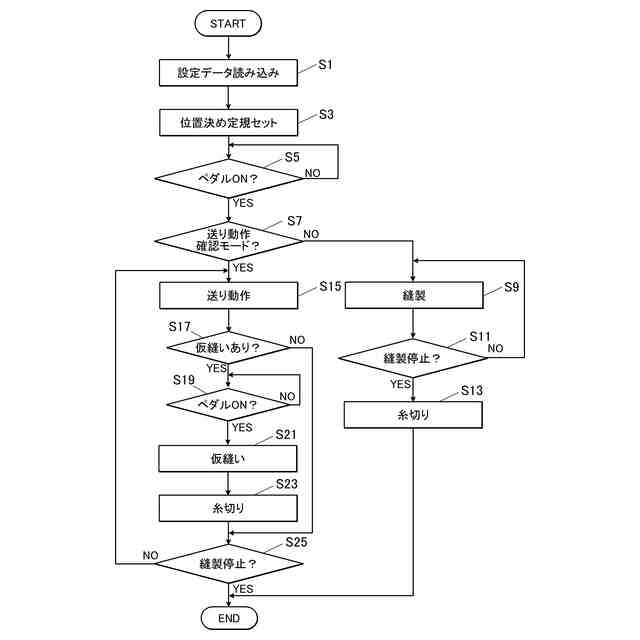
送り動作確認モードが可能なミシンの縫製動作の動作制御(1)フローチャートである。
送り動作確認モードが可能なミシンの縫製動作の動作制御(2)のフローチャートである。
【発明を実施するための形態】
【0009】
[発明の実施形態の概要]
以下、本発明の実施形態であるミシン100について詳細に説明する。
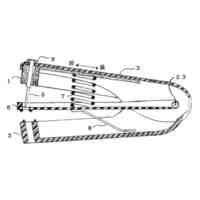
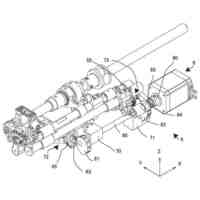
図1はミシン100の後面図、図2はミシン100の左側面図、図3はミシン100の斜視図を示す。
以下、被縫製物C(図10参照)の送り方向下流側を「前」、送り方向上流側を「後」、前を向いた状態で左手側を「左」、右手側を「右」、鉛直上方を「上」、鉛直下方を「下」とする。前後方向、左右方向、上下方向は、互いに直交する。
以下の説明では、ミシン100は水平面に設置されている前提であり、前後方向と左右方向は、水平となる。
【0010】
本発明の実施形態であるミシン100として、いわゆる本縫いミシンを例示する。
ミシン100は、ミシンフレーム110、針上下動機構、送り装置としての下送り機構20、送り装置としての上送り機構40、押さえ機構としての布押さえ機構70、釜機構、糸切り装置、位置決め定規50(図10参照)及び退避機構60(図10参照)を備えている。
針上下動機構は、縫い針11に上下動動作を付与する。
下送り機構20は、針板101上の被縫製物Cに下から送り動作を付与する。
上送り機構40は、針板101上の被縫製物Cに上から送り動作を付与する。
布押さえ機構70は、針板101上の被縫製物Cに押さえ圧を付与する。
釜機構は、縫い針11から上糸のループを捕捉して下糸を絡め、縫い目を形成する。
位置決め定規50は、被縫製物の側端部を突き当てて当該側端部から縫い目までの距離であるコバ幅を決定する。
退避機構60は、位置決め定規50を使用する際に干渉を避けるために上送り機構40のベルトガイド44を退避位置に保持する。
なお、上記ミシン100は、一般的な本縫いミシンが備える、天秤機構、糸調子等の各構成を備えているが、これらは周知のものなので説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ゴム繋ぎ装置
1か月前
JUKI株式会社
ミシンの布押え
1か月前
JUKI株式会社
取得装置及び二本針ミシン
1か月前
JUKI株式会社
部品実装装置及びオフセット情報取得方法
1か月前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
1か月前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
1か月前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
1か月前
個人
下糸連続供給装置
1か月前
株式会社バルダン
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
4か月前
JUKI株式会社
ミシン
5か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ミシン
1か月前
ブラザー工業株式会社
ボビン
1か月前
ブラザー工業株式会社
ミシン
6か月前
ブラザー工業株式会社
ミシン
5か月前
個人
縫製方法
3か月前
個人
ニードルパンチ針を使用した仮留め器具
1か月前
ブラザー工業株式会社
縫製装置
1か月前
JUKI株式会社
上下送りミシン
4か月前
JUKI株式会社
差動送りミシン
5か月前
JUKI株式会社
ミシンの布押え
1か月前
ブラザー工業株式会社
糸巻回装置
1か月前
ブラザー工業株式会社
糸巻回装置
1か月前
株式会社PEGASUS
偏平縫いミシンの送り装置
1か月前
ブラザー工業株式会社
ミシンフレーム
4か月前
JUKI株式会社
縁かがり縫いミシン
5か月前
JUKI株式会社
ミシンの糸切り装置
4か月前
JUKI株式会社
ボタン付け縫製装置
5か月前
株式会社PEGASUS
偏平縫いミシンの押え装置
1か月前
JUKI株式会社
被縫製物の位置決め装置
4か月前
JUKI株式会社
ミシン
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ