TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105054
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223338
出願日
2023-12-28
発明の名称
3次元実装装置及び3次元実装方法
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H05K
13/04 20060101AFI20250703BHJP(他に分類されない電気技術)
要約
【課題】部品の位置ずれを抑制すること。
【解決手段】3次元実装装置は、立体基板を支持するステージと、立体基板の表面に部品を実装する実装ヘッドと、立体基板の表面に接着剤を塗布する塗布ヘッドと、コントローラと、を備える。コントローラは、実装後の部品が許容角度以下になるように、立体基板の表面に設定された複数の実装エリアに対する部品の実装順序を決定する実装順序決定部と、実装順序に従って、複数の実装エリアが水平状態に順次なるようにステージを制御するステージ制御部と、実装順序に従って、水平状態の実装エリアに部品が順次実装されるように実装ヘッドを制御するヘッド制御部と、第1実装エリアに対する第1部品の実装後であって第2部品の実装時に第1部品が許容角度以下にならない場合、第1部品の実装後且つ立体基板の傾斜前に第1部品と第1実装エリアとが接着剤で固定されるように、塗布ヘッドを制御する固定制御部と、を有する。
【選択図】図25
特許請求の範囲
【請求項1】
立体基板を支持するステージと、
前記立体基板の表面に部品を実装する実装ヘッドと、
前記立体基板の表面に接着剤を塗布する塗布ヘッドと、
コントローラと、を備え、
前記コントローラは、
実装後の位置ずれ量が規定量以下に抑制される部品の傾斜角度の最大値を示す許容角度を取得する許容角度取得部と、
実装後の部品が許容角度以下になるように、前記立体基板の表面に設定された複数の実装エリアに対する部品の実装順序を決定する実装順序決定部と、
前記実装順序に従って、複数の前記実装エリアが水平状態に順次なるように前記ステージを制御するステージ制御部と、
前記実装順序に従って、水平状態の前記実装エリアに部品が順次実装されるように前記実装ヘッドを制御するヘッド制御部と、
第1実装エリアに対する第1部品の実装後であって第2部品の実装時に前記第1部品が許容角度以下にならない場合、前記第1部品の実装後且つ前記立体基板の傾斜前に前記第1部品と前記第1実装エリアとが接着剤で固定されるように、前記塗布ヘッドを制御する固定制御部と、を有する、
3次元実装装置。
続きを表示(約 910 文字)
【請求項2】
前記接着剤は、紫外光硬化型であり、
紫外光を射出する紫外光ヘッドを備え、
前記固定制御部は、前記実装エリアに塗布された前記接着剤に紫外光が照射されるように、前記紫外光ヘッドを制御する、
請求項1に記載の3次元実装装置。
【請求項3】
前記コントローラは、実装後の部品の画像データに基づいて実装後の部品の位置ずれ量を算出する位置ずれ量算出部を有し、
前記許容角度取得部は、前記位置ずれ量算出部により算出された前記位置ずれ量が前記規定量以下になる前記部品の傾斜角度の最大値を前記許容角度として取得する、
請求項1に記載の3次元実装装置。
【請求項4】
前記コントローラは、前記部品と前記許容角度との相関データを記憶する許容角度記憶部を有し、
前記許容角度記憶部は、前記許容角度取得部から前記許容角度を取得し記憶する、
請求項1に記載の3次元実装装置。
【請求項5】
前記コントローラは、前記部品の重量に基づいて、前記許容角度を算出する許容角度算出部を有し、
前記許容角度取得部は、前記許容角度算出部から前記許容角度を取得する、
請求項1に記載の3次元実装装置。
【請求項6】
立体基板の表面に実装後の位置ずれ量が規定量以下に抑制される部品の傾斜角度の最大値を示す許容角度を取得することと、
実装後の部品が許容角度以下になるように、前記立体基板の表面に設定された複数の実装エリアに対する部品の実装順序を決定することと、
前記実装順序に従って、複数の前記実装エリアが水平状態に順次なるように前記立体基板を回動することと、
前記実装順序に従って、水平状態の前記実装エリアに部品を順次実装することと、
第1実装エリアに対する第1部品の実装後であって第2部品の実装時に前記第1部品が許容角度以下にならない場合、前記第1部品の実装後且つ前記立体基板の傾斜前に前記第1部品と前記立体基板とを接着剤で固定することと、を含む、
3次元実装方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、3次元実装装置及び3次元実装方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
3次元実装装置に係る技術分野において、特許文献1に開示されているような、立体基板に部品を実装する3次元実装装置が知られている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/207313号
【発明の概要】
【発明が解決しようとする課題】
【0004】
立体基板の表面に設定された実装エリアに部品を実装する場合、実装エリアが水平状態になるように立体基板の傾斜角度が調整される。第1の実装エリアに第1の部品を実装した後に第2の実装エリアに第2の部品を実装するとき、第1の実装エリアが水平面に対して傾斜する可能性がある。第1の実装エリアが水平面に対して傾斜した場合、重力の作用により、第1の部品が位置ずれする可能性がある。
【0005】
本明細書で開示する技術は、部品の位置ずれを抑制することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、立体基板を支持するステージと、立体基板の表面に部品を実装する実装ヘッドと、立体基板の表面に接着剤を塗布する塗布ヘッドと、コントローラと、を備える3次元実装装置を開示する。コントローラは、実装後の位置ずれ量が規定量以下に抑制される部品の傾斜角度の最大値を示す許容角度を取得する許容角度取得部と、実装後の部品が許容角度以下になるように、立体基板の表面に設定された複数の実装エリアに対する部品の実装順序を決定する実装順序決定部と、実装順序に従って、複数の実装エリアが水平状態に順次なるようにステージを制御するステージ制御部と、実装順序に従って、水平状態の実装エリアに部品が順次実装されるように実装ヘッドを制御するヘッド制御部と、第1実装エリアに対する第1部品の実装後であって第2部品の実装時に第1部品が許容角度以下にならない場合、第1部品の実装後且つ立体基板の傾斜前に第1部品と第1実装エリアとが接着剤で固定されるように、塗布ヘッドを制御する固定制御部と、を有する。
【発明の効果】
【0007】
本明細書で開示する技術によれば、部品の位置ずれが抑制される。
【図面の簡単な説明】
【0008】
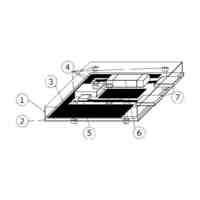
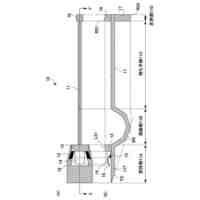
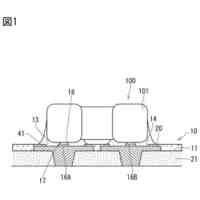
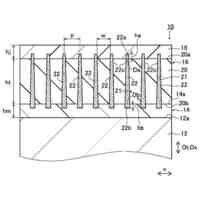
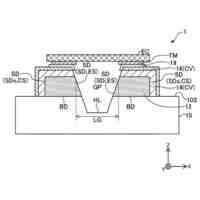
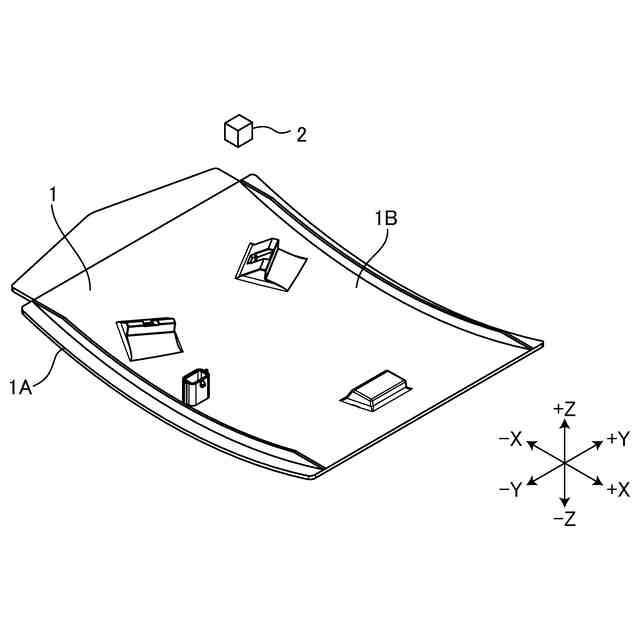
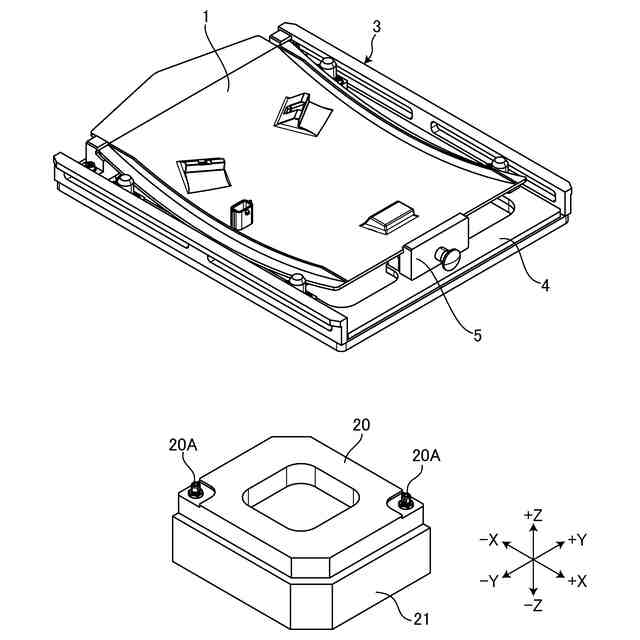
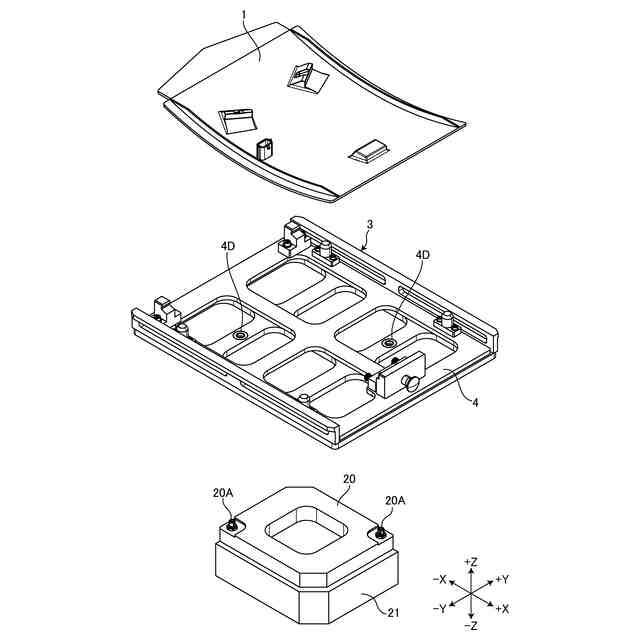
図1は、第1実施形態に係る基板及び部品を示す斜視図である。
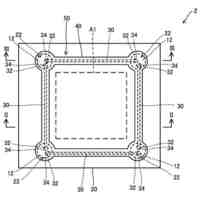
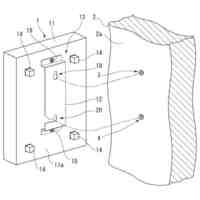
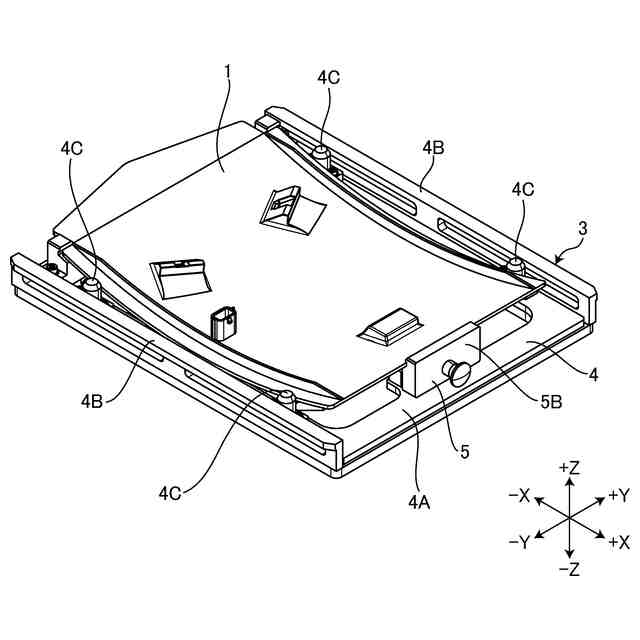
図2は、第1実施形態に係る基板を保持するパレットを示す斜視図である。
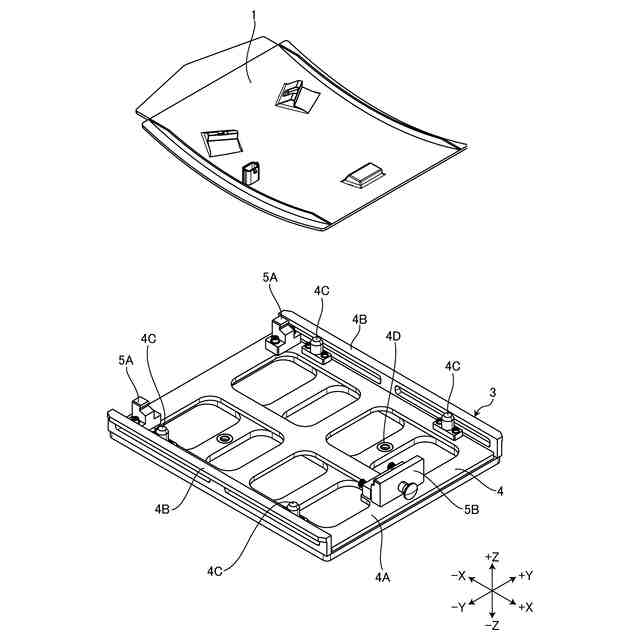
図3は、第1実施形態に係る基板及びパレットを示す分解斜視図である。
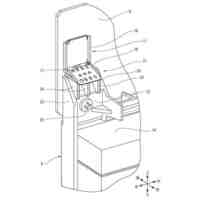
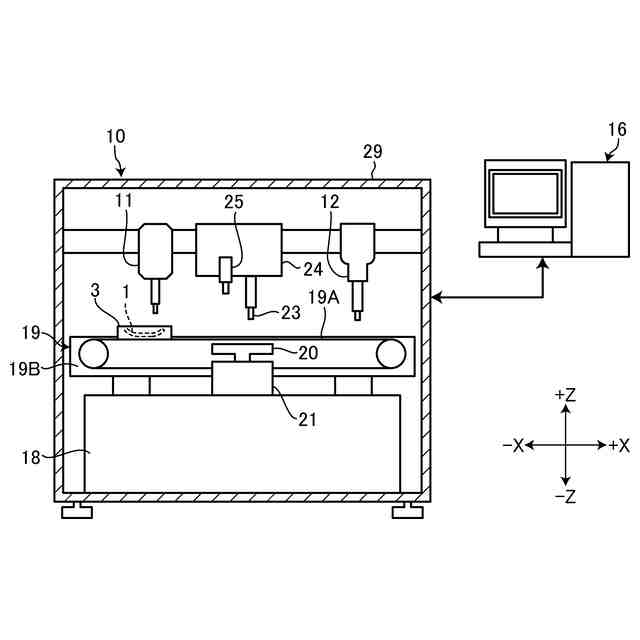
図4は、第1実施形態に係る3次元実装装置を模式的に示す側面図である。
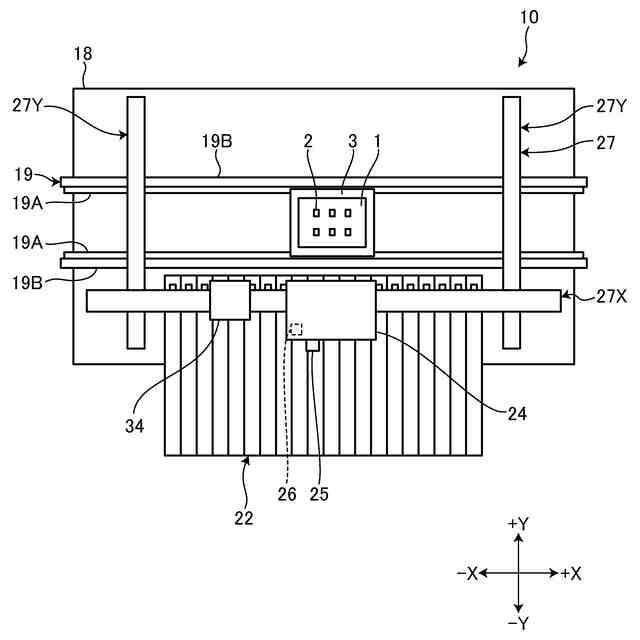
図5は、第1実施形態に係る3次元実装装置を模式的に示す平面図である。
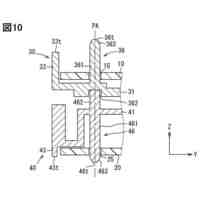
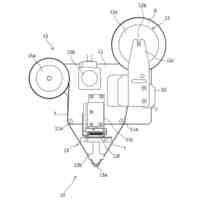
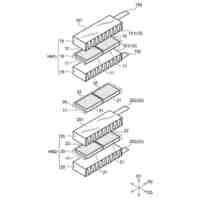
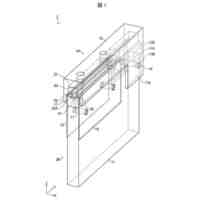
図6は、第1実施形態に係るパレット及びステージを示す斜視図である。
図7は、第1実施形態に係るパレット及びステージを示す分解斜視図である。
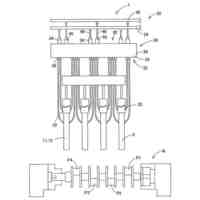
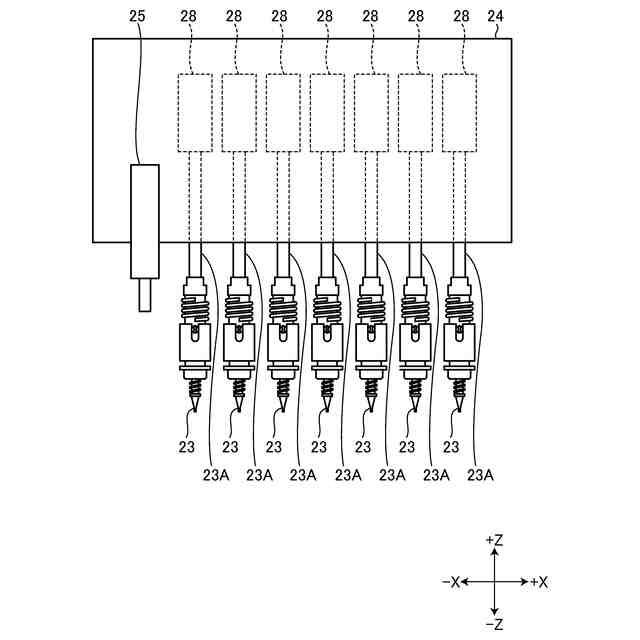
図8は、第1実施形態に係る実装ヘッドを模式的に示す図である。
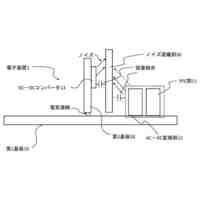
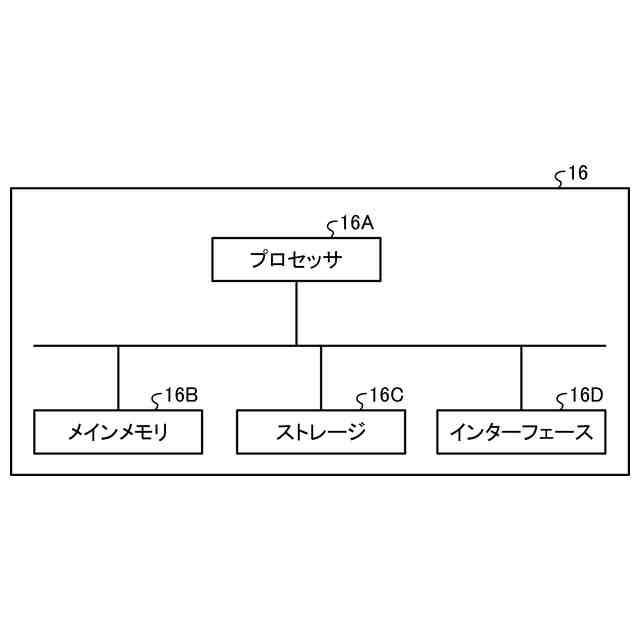
図9は、第1実施形態に係るコントローラのハードウエア構成図である。
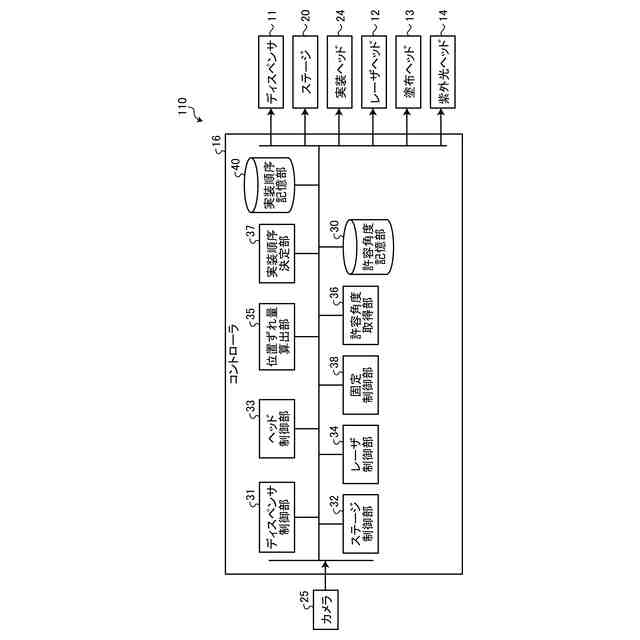
図10は、第1実施形態に係る3次元実装装置を示す機能ブロック図である。
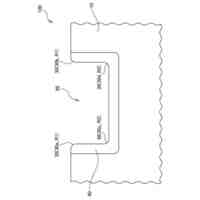
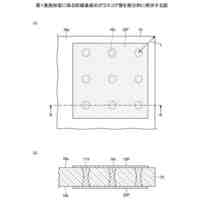
図11は、第1実施形態に係る基板を模式的に示す平面図である。
図12は、第1実施形態に係るステージ及び実装ヘッドの動作を説明する図である。
図13は、第1実施形態に係るステージ及び実装ヘッドの動作を説明する図である。
図14は、第1実施形態に係るレーザヘッドの動作を説明する図である。
図15は、第1実施形態に係る部品の位置ずれを説明する図である。
図16は、第1実施形態に係る部品の実装順序を説明する図である。
図17は、第1実施形態に係る部品の実装順序を説明する図である。
図18は、第1実施形態に係る位置ずれが解消されない部品を説明する図である。
図19は、第1実施形態に係る位置ずれが解消されない部品を説明する図である。
図20は、第1実施形態に係る位置ずれが解消されない部品が存在するときの3次元実装装置の動作を説明する図である。
図21は、第1実施形態に係る位置ずれが解消されない部品が存在するときの3次元実装装置の動作を説明する図である。
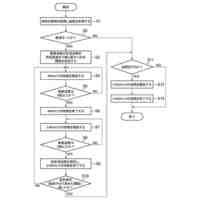
図22は、第1実施形態に係る部品の実装順序の決定方法を示すフローチャートである。
図23は、第1実施形態に係る部品の実装方法を示すフローチャートである。
図24は、第2実施形態に係る3次元実装装置を模式的に示す側面図である。
図25は、第2実施形態に係る3次元実装装置を示す機能ブロック図である。
図26は、第2実施形態に係る塗布ヘッドの動作を説明する図である。
図27は、第2実施形態に係る位置ずれが解消されない部品が存在するときの3次元実装装置の動作を説明する図である。
図28は、第2実施形態に係る位置ずれが解消されない部品が存在するときの3次元実装装置の動作を説明する図である。
図29は、第2実施形態に係る部品の実装方法を示すフローチャートである。
図30は、実施形態に係る許容角度記憶部を模式的に示す図である。
図31は、実施形態に係るコントローラを模式的に示す図である。
【発明を実施するための形態】
【0009】
以下、実施形態について図面を参照しながら説明する。実施形態においては、XYZ直交座標系を規定し、このXYZ直交座標系を参照しながら各部の位置関係について説明する。所定面のX軸に平行な方向をX軸方向とする。X軸に直交する所定面のY軸に平行な方向をY軸方向とする。所定面に直交するZ軸に平行な方向をZ軸方向とする。X軸方向を中心とする回転方向又は傾斜方向をθX方向とする。Y軸方向を中心とする回転方向又は傾斜方向をθY方向とする。Z軸方向を中心とする回転方向又は傾斜方向をθZ方向とする。実施形態において、所定面と水平面とは平行である。Z軸は鉛直軸に平行であり、Z軸方向は上下方向である。+Z側は上側であり、-Z側は下側である。また、実施形態においては、X軸及びY軸を含む所定面を適宜、XY平面、と称する。
【0010】
[第1実施形態]
第1実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
電子部品の実装方法
1か月前
個人
電気式バーナー
18日前
個人
非衝突型ガウス加速器
2か月前
日本精機株式会社
回路基板
1か月前
愛知電機株式会社
装柱金具
26日前
個人
節電材料
2か月前
イビデン株式会社
配線基板
27日前
キヤノン株式会社
電子機器
1か月前
アイホン株式会社
電気機器
1か月前
アイホン株式会社
電気機器
2か月前
日本放送協会
基板固定装置
1か月前
メクテック株式会社
配線基板
2か月前
東レ株式会社
霧化状活性液体供給装置
2か月前
個人
静電気中和除去装置
5日前
シャープ株式会社
加熱機器
11日前
株式会社デンソー
電子装置
27日前
イビデン株式会社
プリント配線板
3か月前
FDK株式会社
基板
1か月前
イビデン株式会社
プリント配線板
1か月前
サクサ株式会社
開き角度規制構造
25日前
株式会社レクザム
剥離装置
26日前
イビデン株式会社
配線基板
2か月前
イビデン株式会社
配線基板
2か月前
サクサ株式会社
筐体の壁掛け構造
2か月前
富士フイルム株式会社
積層体
27日前
日産自動車株式会社
電子部品
1か月前
新電元工業株式会社
電子装置
1か月前
株式会社レゾナック
冷却装置
1か月前
カシン工業株式会社
PTC発熱装置
3か月前
オムロン株式会社
端子折り曲げ治具
1か月前
富士電子工業株式会社
高周波焼入装置
3か月前
富士電子工業株式会社
誘導加熱コイル
28日前
日本特殊陶業株式会社
配線基板
2か月前
日本無線株式会社
電子機器用密閉構造
2か月前
新光電気工業株式会社
配線基板
1か月前
タイガー魔法瓶株式会社
加熱器
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ