TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101452
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218305
出願日
2023-12-25
発明の名称
リード矯正装置、実装装置、及びリード矯正装置の制御方法。
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H05K
13/04 20060101AFI20250630BHJP(他に分類されない電気技術)
要約
【課題】汎用リード矯正治具によってリード先端位置を高精度かつ迅速に矯正する。
【解決手段】リード部品保持機構に保持されたリード部品を撮像した画像データに基づきリード先端位置を認識させる認識装置の上方に保持されたリード部品のリードの先端部を前記リード部品保持機構に対して相対的に移動して、当該リード先端位置を矯正するリード矯正治具を前記認識装置に対して移動させる治具移動装置と、各部を制御する制御装置は、前記リードの物性値及び形状に基づいてスプリングバック量の初期値を算出し、記憶しているリード先端の配列情報と、前記画像データに基づいたリード先端位置情報とに基づき、当該リード先端のずれ方向及びずれ量を算出し、前記ずれ方向に基づき矯正方向を決定し、既に矯正が試行された前記リード矯正治具の移動量の制御値の推移と、前記スプリングバック量の推定値を算出し、前記ずれ量と前記推定値とに基づいて矯正量を決定する。
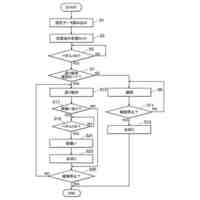
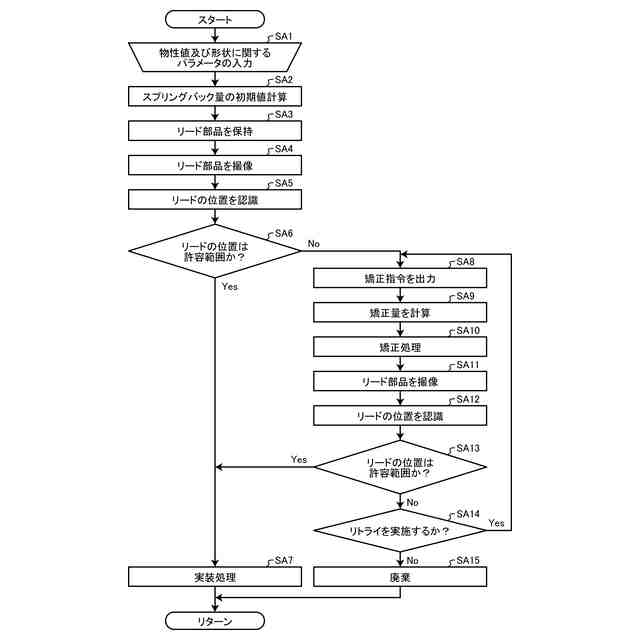
【選択図】図10
特許請求の範囲
【請求項1】
リード部品を保持して移動させるリード部品保持機構と、
前記リード部品保持機構に保持されたリード部品を撮像して画像データに基づいてリードの先端の位置を認識する認識装置と、
前記認識装置の上方に保持されたリード部品のリードの先端部を引っ掛けた状態で前記リード部品保持機構に対して相対的に移動することで、当該リードの先端の位置を矯正するリード矯正治具と、
前記リード矯正治具を前記認識装置に対して移動させる治具移動装置と、
各部を制御する制御装置と、
を備え、
前記制御装置は、
前記リードの物性値及び形状に基づいてスプリングバック量の初期値を算出し、
予め記憶しているリードの先端の配列情報と、前記画像データに基づいて認識された当該リードの先端の位置情報とに基づいて、当該リードの先端のずれ方向及びずれ量を算出し、
前記ずれ方向に基づいて矯正方向を決定し、
既に矯正が試行された前記リード矯正治具の移動量の制御値と矯正回との関係を示す制御値の推移と、前記スプリングバック量とに基づいて、スプリングバック量の推定値を算出し、
前記ずれ量と前記スプリングバック量の推定値とに基づいて矯正量を決定する、
リード矯正装置。
続きを表示(約 1,300 文字)
【請求項2】
前記制御装置は、
既に矯正が試行された前記リード矯正治具の移動量の制御値と矯正回との関係を示す制御値の推移と、最後に算出された前記スプリングバック量の推定値と、に基づいて、新たなスプリングバック量の推定値を算出して更新する、
請求項1に記載のリード矯正装置。
【請求項3】
前記制御装置は、
決定した矯正量に基づいて前記リード矯正治具によって前記リードの先端の位置を矯正した場合、当該リード矯正治具を制御した制御値と矯正回との関係を示す前記制御値の推移を記録して蓄積する、
請求項1に記載のリード矯正装置。
【請求項4】
請求項1から3のいずれか1項に記載のリード矯正装置と、
前記リード部品保持機構であって前記リード部品を保持するノズルを有する実装ヘッドと、
前記画像データに基づいて前記リード矯正治具で前記リードの先端の位置を矯正した前記リード部品を基板に実装させる前記制御装置と、
を備える、
実装装置。
【請求項5】
リード部品を保持して移動させるリード部品保持機構と、
前記リード部品保持機構に保持されたリード部品を撮像して画像データに基づいてリードの先端の位置を認識する認識装置と、
前記認識装置の上方に保持されたリード部品のリードの先端部を引っ掛けた状態で前記リード部品保持機構に対して相対的に移動することで、当該リードの先端の位置を矯正するリード矯正治具と、
前記リード矯正治具を前記認識装置に対して移動させる治具移動装置と、
を備えるリード矯正装置の制御方法であって、
前記リードの物性値及び形状に基づいてスプリングバック量の初期値を算出することと、
予め記憶しているリードの先端の配列情報と、前記画像データに基づいて認識された当該リードの先端の位置情報とに基づいて、当該リードの先端のずれ方向及びずれ量を算出することと、
前記ずれ方向に基づいて矯正方向を決定することと、
既に矯正が試行された前記リード矯正治具の移動量の制御値と矯正回との関係を示す制御値の推移と、前記スプリングバック量とに基づいて、スプリングバック量の推定値を算出することと、
前記ずれ量と前記スプリングバック量の推定値とに基づいて矯正量を決定することと、
を含む、
リード矯正装置の制御方法。
【請求項6】
既に矯正が試行された前記リード矯正治具の移動量の制御値と矯正回との関係を示す制御値の推移と、最後に算出された前記スプリングバック量の推定値と、に基づいて、新たなスプリングバック量の推定値を算出して更新することを更に含む、
請求項5に記載のリード矯正装置の制御方法。
【請求項7】
決定した矯正量に基づいて前記リード矯正治具によって前記リードの先端の位置を矯正した場合、当該リード矯正治具を制御した制御値と矯正回との関係を示す前記制御値の推移を記録して蓄積することを更に含む、
請求項5に記載のリード矯正装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、リード矯正装置、実装装置、及びリード矯正装置の制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
可動式のヘッドで電子部品を保持し、当該ヘッドを基板上に移動させて当該電子部品を当該基板に実装する実装装置が知られている。このような実装装置において、部品本体から下方に延びる複数のリードを有するリード部品を基板のスルーホールへ差し込んで基板に実装する際、リード間の間隔が予め設定された許容範囲内に入っていない場合にこれを矯正するリード矯正治具が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2016-021553号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このようなリード矯正治具においては、リードのピッチ、本数、形状、レイアウト等に応じて、専用の治具を都度交換する必要があり煩雑であった。また、リードのピッチ、本数、形状、レイアウト等に応じて、高精度にリードの位置を測定するとともに矯正できることが要望される。
【0005】
本明細書で開示する技術は、汎用性の高いリード矯正治具によってリードの先端位置を高精度にかつ迅速に矯正することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、リード矯正装置を開示する。リード矯正装置は、リード部品を保持して移動させるリード部品保持機構と、前記リード部品保持機構に保持されたリード部品を撮像して画像データに基づいてリードの先端の位置を認識する認識装置と、前記認識装置の上方に保持されたリード部品のリードの先端部を引っ掛けた状態で前記リード部品保持機構に対して相対的に移動することで、当該リードの先端の位置を矯正するリード矯正治具と、前記リード矯正治具を前記認識装置に対して移動させる治具移動装置と、各部を制御する制御装置と、を備え、前記制御装置は、前記リードの物性値及び形状に基づいてスプリングバック量の初期値を算出し、予め記憶しているリードの先端の配列情報と、前記画像データに基づいて認識された当該リードの先端の位置情報とに基づいて、当該リードの先端のずれ方向及びずれ量を算出し、前記ずれ方向に基づいて矯正方向を決定し、既に矯正が試行された前記リード矯正治具の移動量の制御値と矯正回との関係を示す制御値の推移と、前記スプリングバック量とに基づいて、スプリングバック量の推定値を算出し、前記ずれ量と前記スプリングバック量の推定値とに基づいて矯正量を決定する。
【発明の効果】
【0007】
本明細書で開示する技術によれば、汎用性の高いリード矯正治具によってリードの先端位置を高精度にかつ迅速に矯正することができる。
【図面の簡単な説明】
【0008】
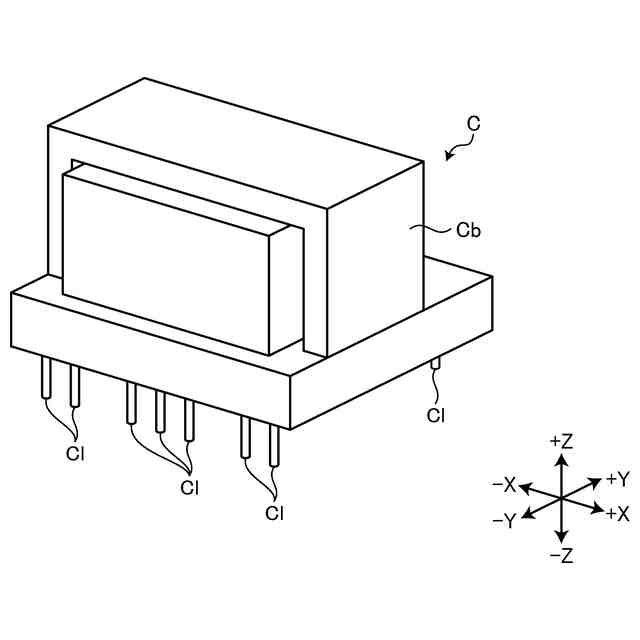
図1は、実施形態に係るリード部品を模式的に示す斜視図である。
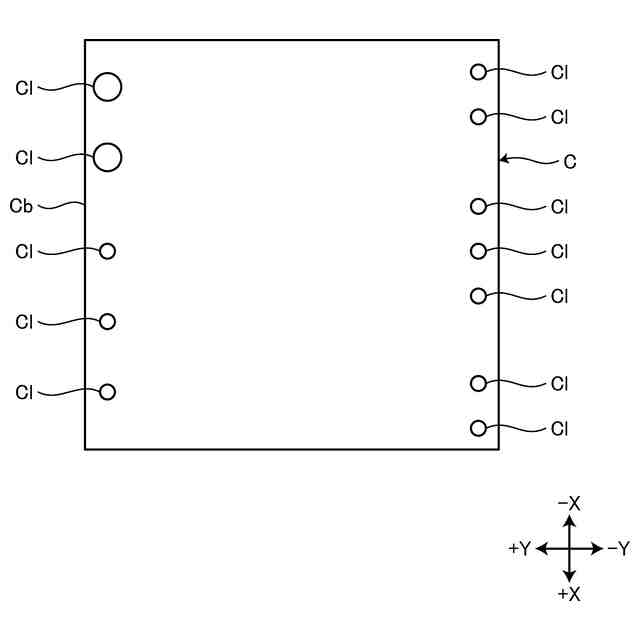
図2は、実施形態に係るリード部品を模式的に示す底面図である。
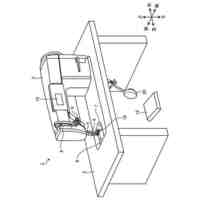
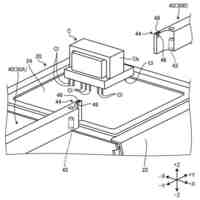
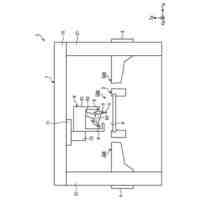
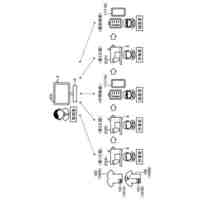
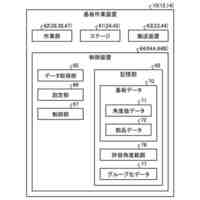
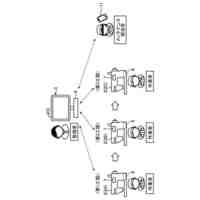
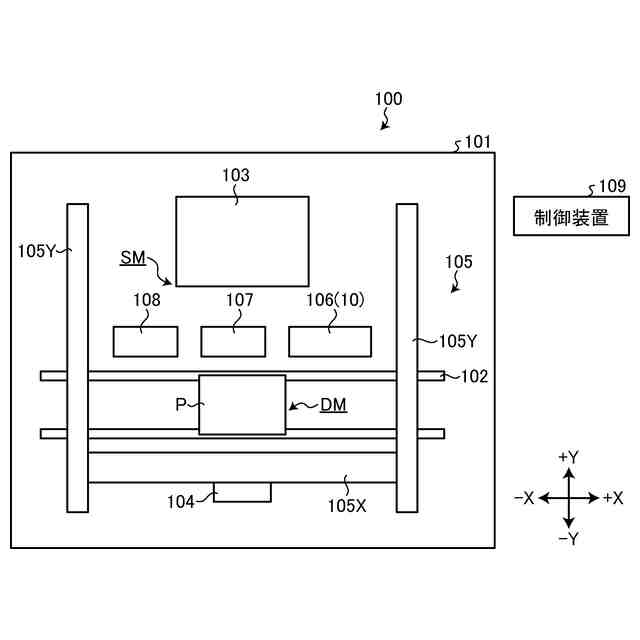
図3は、実施形態に係る実装装置の概略構成を模式的に示す平面図である。
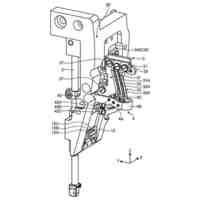
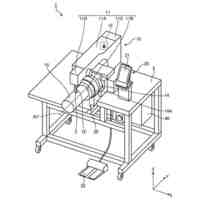
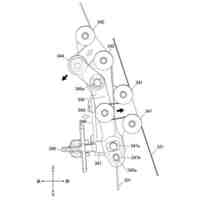
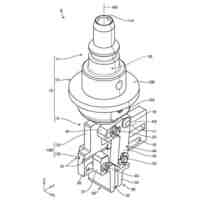
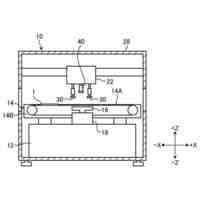
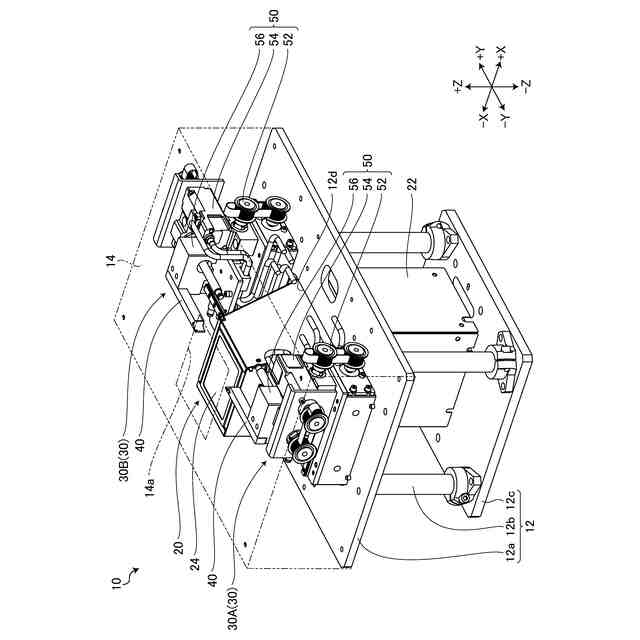
図4は、実施形態に係るリード矯正装置を示す斜視図である。
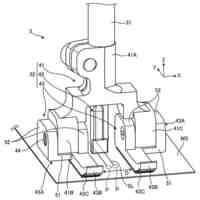
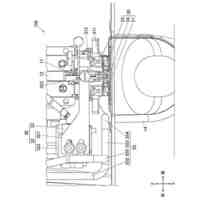
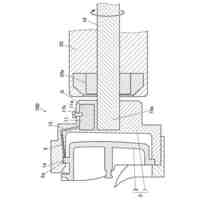
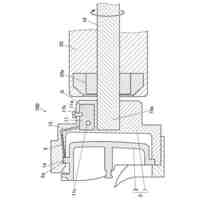
図5は、実施形態に係る認識ユニットを模式的に示す斜視図である。
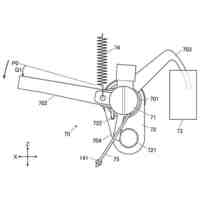
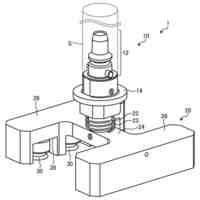
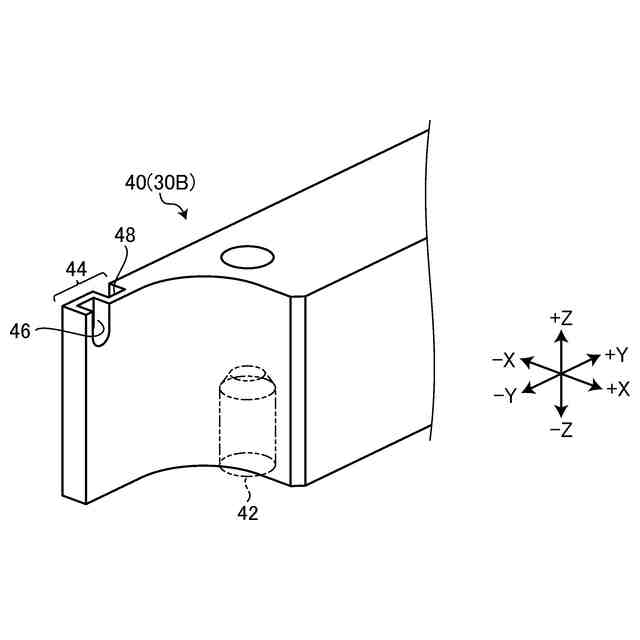
図6は、実施形態に係るリード矯正治具の一部を示す斜視図である。
図7は、実施形態に係るリード矯正治具の一部を示す斜視図である。
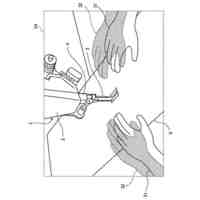
図8は、実施形態に係るリード矯正治具の動作を説明するための図である。
図9は、実施形態に係るリード矯正治具の動作を説明するための図である。
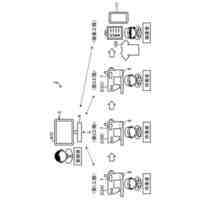
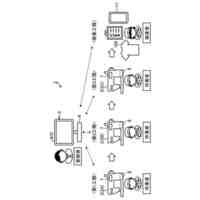
図10は、実施形態に係る実装方法を示すフローチャートである。
図11は、実施形態に係るリードの認識動作を説明するための図である。
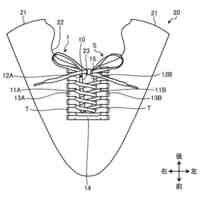
図12は、実施形態に係るリード部品の画像データを模式的に示す図である。
図13は、実施形態に係るリード部品のリードが基板の開口に挿入される状態を模式的に示す図である。
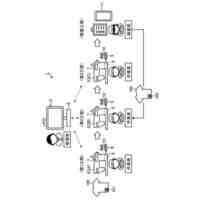
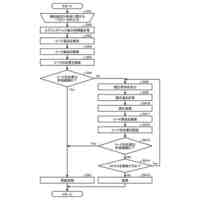
図14は、実施形態に係るリードの矯正量の算出方法を示すフローチャートである。
図15は、実施形態に係るリードのスプリングバック量の更新方法を示すフローチャートである。
図16は、初期値のスプリングバック量を用いた場合の矯正回毎の誤差を示すグラフである。
図17は、矯正回毎の制御用パラメータを示すグラフである。
図18は、推定したスプリングバック量を用いた場合の矯正回毎の誤差を示すグラフである。
【発明を実施するための形態】
【0009】
以下、実施形態について図面を参照しながら説明する。なお、下記の発明を実施するための形態(以下、実施形態という。)により本発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が容易に想定できるもの、実質的に同一のもの、いわゆる均等の範囲のものが含まれる。更に、下記実施形態で開示した構成要素は適宜組み合わせることが可能である。
【0010】
実施形態においては、XYZ直交座標系を規定し、このXYZ直交座標系を参照しながら各部の位置関係について説明する。所定面のX軸に平行な方向をX軸方向とする。X軸に直交する所定面のY軸に平行な方向をY軸方向とする。所定面に直交するZ軸に平行な方向をZ軸方向とする。X軸方向を中心とする回転方向又は傾斜方向をθX方向とする。Y軸方向を中心とする回転方向又は傾斜方向をθY方向とする。Z軸方向を中心とする回転方向又は傾斜方向をθZ方向とする。実施形態において、所定面と水平面とは平行である。Z軸は鉛直軸に平行であり、Z軸方向は上下方向である。+Z側は上側であり、-Z側は下側である。なお、所定面は、水平面に対して傾斜してもよい。また、実施形態においては、X軸及びY軸を含む所定面を適宜、XY平面、と称する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
6日前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1日前
JUKI株式会社
縫製システム
1か月前
JUKI株式会社
ミシン制御装置
1か月前
JUKI株式会社
差動送りミシン
21日前
JUKI株式会社
ミシンの糸切り装置
1日前
JUKI株式会社
縁かがり縫いミシン
2か月前
JUKI株式会社
縁かがり縫いミシン
22日前
JUKI株式会社
ボタン付け縫製装置
20日前
JUKI株式会社
ミシンの消費電力分析装置
1か月前
JUKI株式会社
リード矯正装置及び実装装置
1日前
JUKI株式会社
ミシン釜のグリース供給構造
27日前
JUKI株式会社
ミシン釜のグリース供給構造
27日前
JUKI株式会社
ミシン釜のグリース供給構造
27日前
JUKI株式会社
グリップ装置及び部品実装装置
23日前
JUKI株式会社
実装装置及び実装装置の制御方法
29日前
JUKI株式会社
工業用ミシン及びユーザ認証方法
1か月前
JUKI株式会社
実装装置及び実装装置の制御方法
29日前
JUKI株式会社
縫製管理システム及び縫製管理方法
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
1か月前
JUKI株式会社
部品吸着ノズル及びノズル収納装置
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
1か月前
JUKI株式会社
基板作業装置及び実装基板の製造方法
1か月前
JUKI株式会社
ミシン管理システム及びミシン管理方法
2日前
JUKI株式会社
ミシン管理システム及びミシン管理方法
1か月前
JUKI株式会社
ミシンの作業支援システム及びミシンの作業支援方法
1か月前
JUKI株式会社
編み紐付きパーツ、紐編み補助装置、及び紐編み補助方法
29日前
JUKI株式会社
リード矯正装置、実装装置、及びリード矯正装置の制御方法。
2日前
株式会社コロナ
電気機器
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ