TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025077448
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023189637
出願日
2023-11-06
発明の名称
ミシン
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
D05B
69/18 20060101AFI20250512BHJP(縫製;刺しゅう;タフティング)
要約
【課題】送り量の調整を操作性良く実施可能なミシンを提供すること。
【解決手段】ミシンは、縫製対象を送る送り歯と、操作者の膝で初期位置から所定方向に押し込まれるように操作される膝レバーと、初期位置からの膝レバーの押し込み量を検出するレバーセンサと、レバーセンサの検出信号に基づいて、送り歯の送り量を変化させる制御指令を出力するコントローラと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
縫製対象を送る送り歯と、
操作者の膝で初期位置から所定方向に押し込まれるように操作される膝レバーと、
前記初期位置からの前記膝レバーの押し込み量を検出するレバーセンサと、
前記レバーセンサの検出信号に基づいて、前記送り歯の送り量を変化させる制御指令を出力するコントローラと、を備える、
ミシン。
続きを表示(約 920 文字)
【請求項2】
前記コントローラは、前記押し込み量が大きいほど前記送り量を小さくする、
請求項1に記載のミシン。
【請求項3】
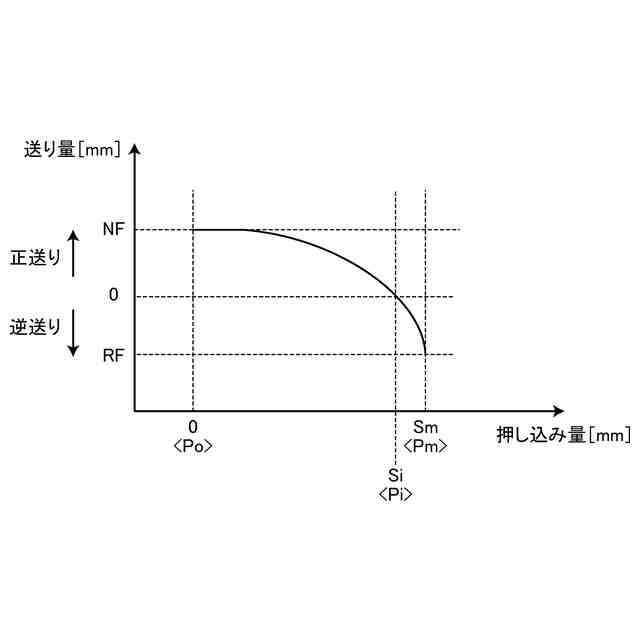
前記コントローラは、前記押し込み量が大きいほど前記送り量の変化率を大きくする、
請求項2に記載のミシン。
【請求項4】
前記コントローラは、前記送り量の変化率を一定にする、
請求項2に記載のミシン。
【請求項5】
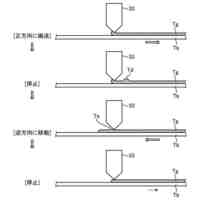
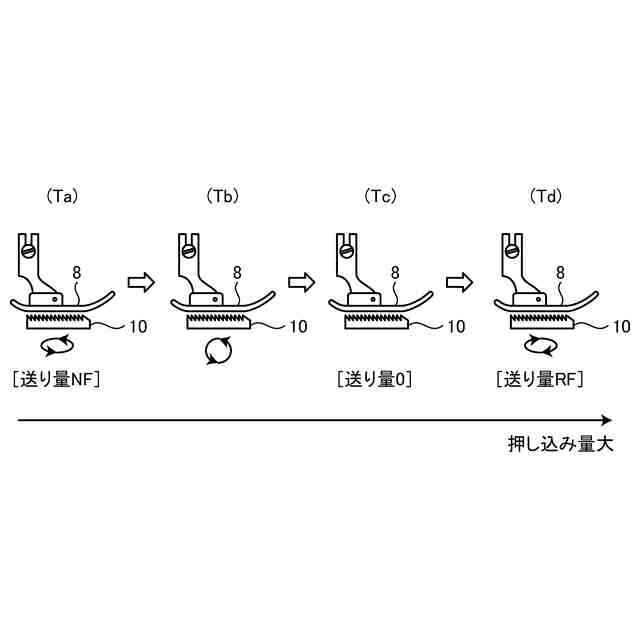
前記送り歯は、前記縫製対象を正方向に送る正送りと、前記縫製対象を逆方向に送る逆送りとを実施可能であり、
前記コントローラは、前記押し込み量に基づいて、前記正送りから前記逆送りに切り換える、
請求項1に記載のミシン。
【請求項6】
前記膝レバーは、前記初期位置と最大位置との間の回動範囲を回動可能であり、
前記回動範囲において前記初期位置と前記最大位置との間に方向切換位置が規定され、
前記コントローラは、前記膝レバーが前記初期位置から前記方向切換位置に移動したときに、前記正送りから前記逆送りに切り換える、
請求項5に記載のミシン。
【請求項7】
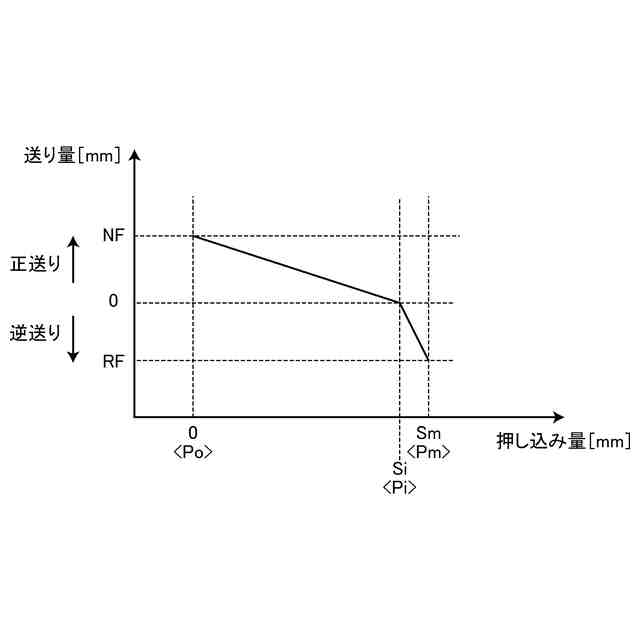
前記コントローラは、前記初期位置と前記方向切換位置との間において、前記押し込み量が大きいほど前記正送りの送り量を小さくし、前記方向切換位置と前記最大位置との間において、前記押し込み量が大きいほど前記逆送りの送り量を大きくする、
請求項6に記載のミシン。
【請求項8】
前記回動範囲において、前記方向切換位置と前記最大位置との距離は、前記方向切換位置と前記初期位置との距離よりも短い、
請求項7に記載のミシン。
【請求項9】
前記逆送りの送り量の変化率は、前記正送りの送り量の変化率よりも大きい、
請求項8に記載のミシン。
【請求項10】
前記コントローラは、前記正送り及び前記逆送りのそれぞれにおいて、前記押し込み量が大きいほど前記送り量の変化率を大きくする、
請求項9に記載のミシン。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、ミシンに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
ミシンに係る技術分野において、特許文献1に開示されているような、送り歯の送り量を調整可能なミシンが知られている。また、特許文献2に開示されているような、押さえを上昇させる押さえ上げ装置を有するミシンが知られている。また、特許文献3に開示されているような、膝レバーを備えるミシンが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2019-055108号公報
特開2011-092523号公報
実公昭39-24853号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本明細書で開示する技術は、送り量の調整を操作性良く実施可能なミシンを提供することを目的とする。
【課題を解決するための手段】
【0005】
本明細書は、ミシンを開示する。ミシンは、縫製対象を送る送り歯と、操作者の膝で初期位置から所定方向に押し込まれるように操作される膝レバーと、初期位置からの膝レバーの押し込み量を検出するレバーセンサと、レバーセンサの検出信号に基づいて、送り歯の送り量を変化させる制御指令を出力するコントローラと、を備える。
【発明の効果】
【0006】
本明細書で開示する技術によれば、送り量の調整を操作性良く実施可能なミシンが提供される。
【図面の簡単な説明】
【0007】
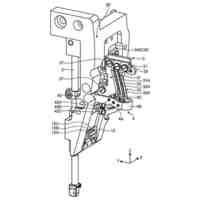
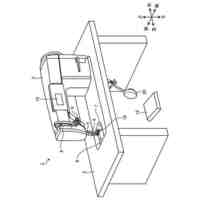
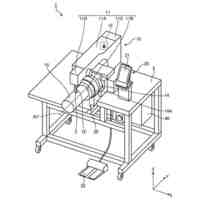
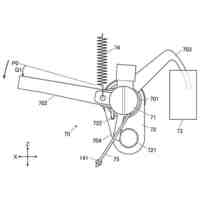
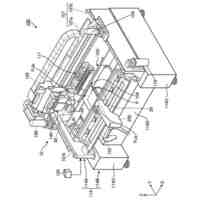
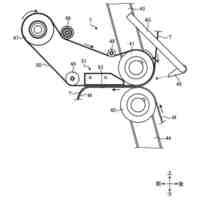
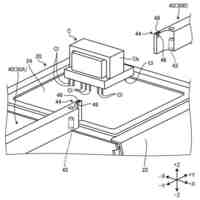
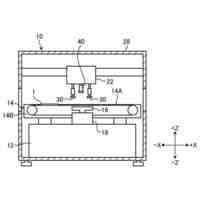
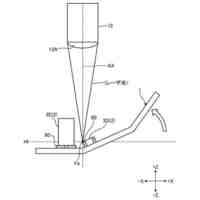
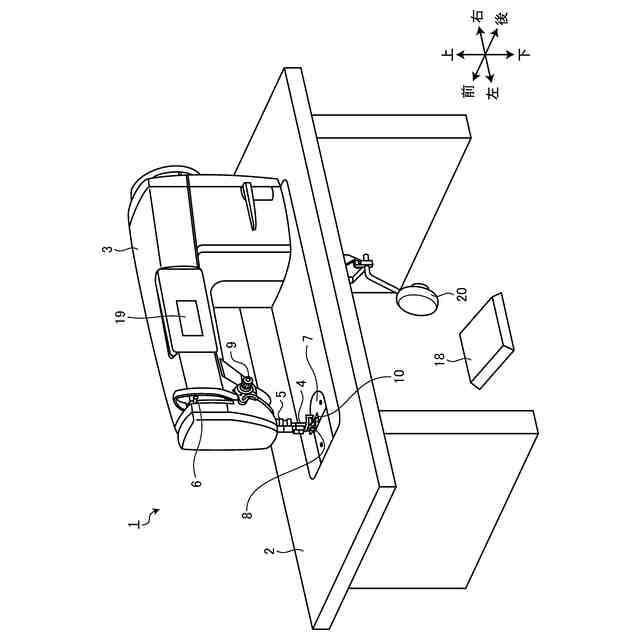
図1は、第1実施形態に係るミシンを示す斜視図である。
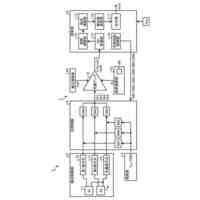
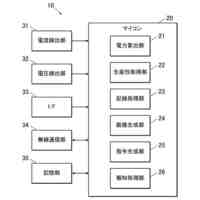
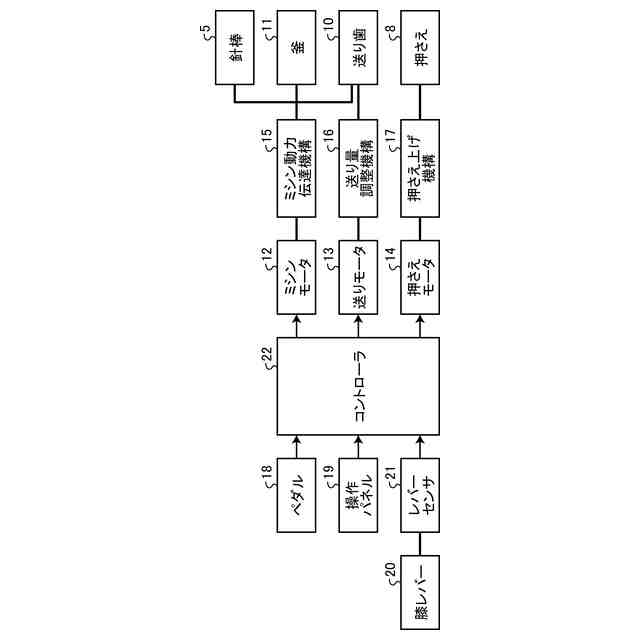
図2は、第1実施形態に係るミシンを示すブロック図である。
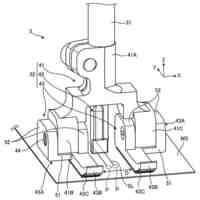
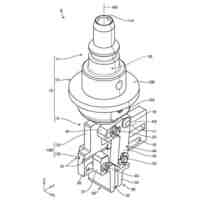
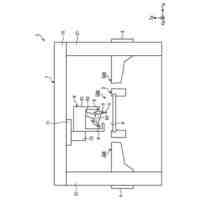
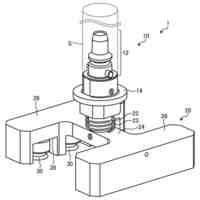
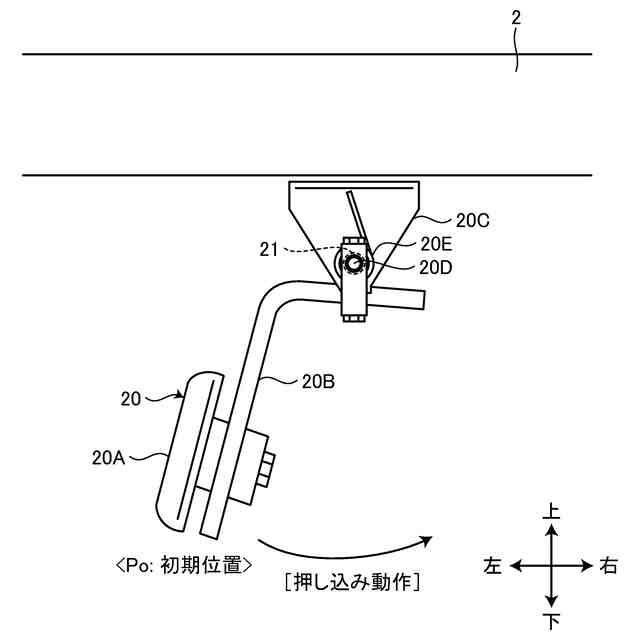
図3は、第1実施形態に係る膝レバーを示す図である。
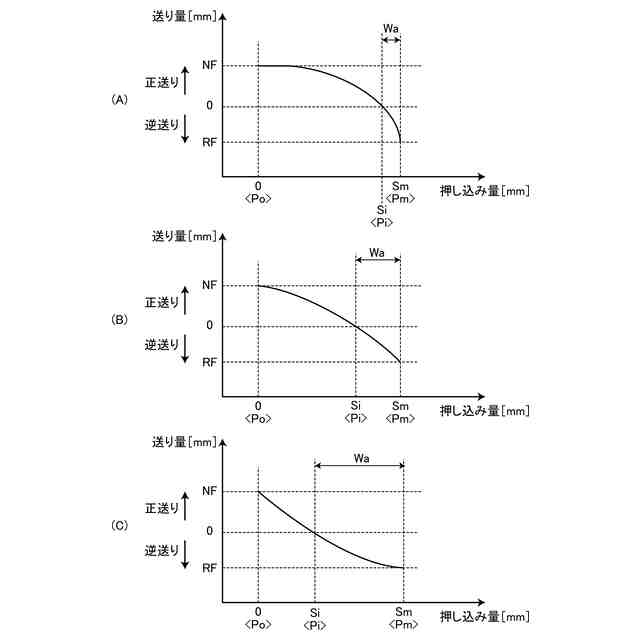
図4は、第1実施形態に係る送り歯の送り量の調整方法を説明するための図である。
図5は、第1実施形態に係る膝レバーの押し込み量と送り歯の送り量との関係を説明するための図である。
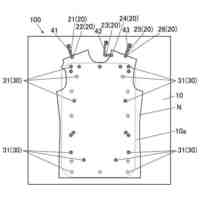
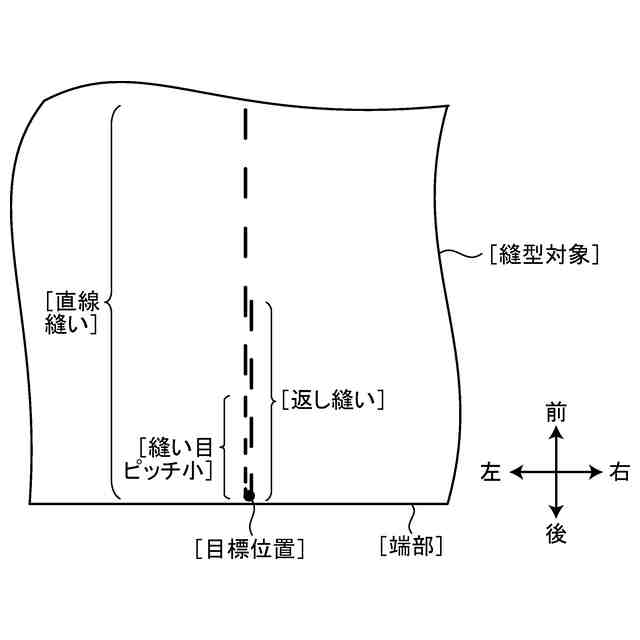
図6は、第1実施形態に係る縫製対象に形成される縫い目を説明するための図である。
図7は、第2実施形態に係る送り歯の送り量の調整方法を説明するための図である。
図8は、第3実施形態に係る送り歯の送り量の調整方法を説明するための図である。
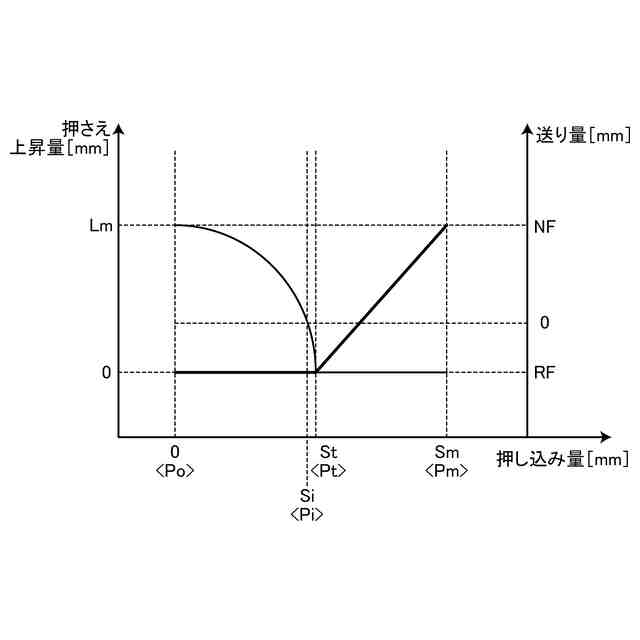
図9は、第4実施形態に係る送り歯の送り量の調整方法及び押さえの上昇方法を説明するための図である。
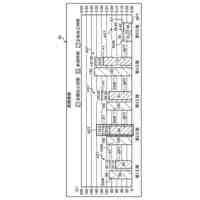
図10は、第4実施形態に係る膝レバーの押し込み量と送り歯の送り量と押さえの動作との関係を説明するための図である。
図11は、第4実施形態に係る膝レバーの回動負荷を説明するための図である。
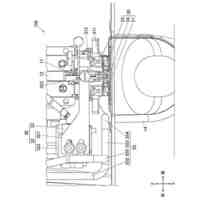
図12は、第5実施形態に係る押さえの上昇方法を説明するための図である。
【発明を実施するための形態】
【0008】
以下、実施形態について図面を参照しながら説明する。実施形態においては、左、右、前、後、上、及び下の用語を用いて各部の位置関係について説明する。これらの用語は、ミシン1の中心を基準とした相対位置又は方向を示す。
【0009】
[第1実施形態]
第1実施形態について説明する。
【0010】
<ミシン>
図1は、本実施形態に係るミシン1を示す斜視図である。図2は、本実施形態に係るミシン1を示すブロック図である。本実施形態において、ミシン1は、工業用ミシンである。ミシン1は、所謂本縫いミシンである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
3か月前
JUKI株式会社
ミシン
3か月前
JUKI株式会社
ミシン
3か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
基板作業装置
1か月前
JUKI株式会社
部品実装装置
1か月前
JUKI株式会社
上下送りミシン
1か月前
JUKI株式会社
差動送りミシン
2か月前
JUKI株式会社
ボンディング装置
1か月前
JUKI株式会社
ボンディング装置
1か月前
JUKI株式会社
縫製管理システム
12日前
JUKI株式会社
ボタン付け縫製装置
1か月前
JUKI株式会社
ミシンの糸切り装置
1か月前
JUKI株式会社
縁かがり縫いミシン
2か月前
JUKI株式会社
磁気検出回路及びミシン
1か月前
JUKI株式会社
被縫製物の位置決め装置
1か月前
JUKI株式会社
ミシンの消費電力分析装置
2か月前
JUKI株式会社
ミシン釜のグリース供給構造
2か月前
JUKI株式会社
ミシン釜のグリース供給構造
2か月前
JUKI株式会社
ミシン釜のグリース供給構造
2か月前
JUKI株式会社
リード矯正装置及び実装装置
1か月前
JUKI株式会社
グリップ装置及び部品実装装置
2か月前
JUKI株式会社
実装装置及び実装装置の制御方法
5日前
JUKI株式会社
実装装置及び実装装置の制御方法
2か月前
JUKI株式会社
実装装置及び実装装置の制御方法
2か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
2か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
3か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
3か月前
JUKI株式会社
3次元実装装置及び3次元実装方法
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
1か月前
JUKI株式会社
部品吸着ノズル及びノズル収納装置
2か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
3か月前
JUKI株式会社
3次元実装装置及び3次元実装方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ