TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087115
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201542
出願日
2023-11-29
発明の名称
実装装置及び実装装置の制御方法
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H05K
13/08 20060101AFI20250603BHJP(他に分類されない電気技術)
要約
【課題】タレット型の実装ヘッドにおいて位置ずれが発生した場合に迅速に補正すること。
【解決手段】実装装置は、基板に実装する電子部品を保持する複数のノズルと、前記複数のノズルを周縁部で支持するタレットを有する実装ヘッドと、前記タレットに対して前記複数のノズルのそれぞれを駆動軸と平行な方向に移動させるとともに回転軸を中心として前記タレットを旋回させるノズル駆動装置と、前記実装ヘッドに支持されて前記ノズルに保持された前記電子部品を当該ノズルの駆動軸と平行な方向から撮像する撮像装置と、制御装置と、を備え、制御装置は、前記撮像装置により撮像された撮像画像から認識された前記電子部品の位置の初期位置からのずれ量を算出して記憶し、前記ずれ量を算出した前記複数のノズルにおいて、過去のずれ量に対する最後に取得したずれ量の変化量が閾値を超え、かつずれ方向の正負が同じである場合、前記回転軸の回転方向の原点を補正する補正処理が必要であると判定する。
【選択図】図1
特許請求の範囲
【請求項1】
基板に実装する電子部品を保持する複数のノズルと、
前記複数のノズルを周縁部で支持するタレットを有する実装ヘッドと、
前記タレットに対して前記複数のノズルのそれぞれを駆動軸と平行な方向に移動させるとともに回転軸を中心として前記タレットを旋回させるノズル駆動装置と、
前記実装ヘッドに支持されて前記ノズルに保持された前記電子部品を当該ノズルの駆動軸と平行な方向から撮像する撮像装置と、
制御装置と、
を備え、
制御装置は、
前記撮像装置により撮像された撮像画像から認識された前記電子部品の位置の初期位置からのずれ量を算出して記憶し、
前記ずれ量を算出した前記複数のノズルにおいて、過去のずれ量に対する最後に取得したずれ量の変化量が閾値を超え、かつずれ方向の正負が同じである場合、前記回転軸の回転方向の原点を補正する補正処理が必要であると判定する、
実装装置。
続きを表示(約 1,200 文字)
【請求項2】
前記制御装置は、
前記複数のノズル毎に、過去に算出した複数のずれ量の中央値又は平均値を算出して記憶し、
前記中央値又は平均値に対する最後に取得したずれ量の変化量が閾値を超え、かつずれ方向の正負が同じである場合、前記回転軸の回転方向の原点を補正する補正処理が必要であると判定する、
請求項1に記載の実装装置。
【請求項3】
前記制御装置は、
前記複数のノズルのうち全てのノズルにおいて、過去のずれ量に対する最後に取得したずれ量の変化量が閾値を超え、かつずれ方向の正負が同じである場合、前記回転軸の回転方向の原点を補正する補正処理が必要であると判定する、
請求項1に記載の実装装置。
【請求項4】
前記複数のノズルのうち1つのノズルに変えて装着可能な補助治具ノズルをさらに備え、
前記制御装置は、
前記撮像装置に前記補助治具ノズルを撮像させ、
前記撮像装置により撮像された撮像画像から認識された前記補助治具ノズルの中心位置に基づいて、前記回転軸の回転方向の原点を補正する補正量を算出する、
請求項1に記載の実装装置。
【請求項5】
基板に実装する電子部品を保持する複数のノズルと、
前記複数のノズルを周縁部で支持するタレットを有する実装ヘッドと、
前記タレットに対して前記複数のノズルのそれぞれを駆動軸と平行な方向に移動させるとともに回転軸を中心として前記タレットを旋回させるノズル駆動装置と、
前記実装ヘッドに支持されて前記ノズルに保持された前記電子部品を当該ノズルの駆動軸と平行な方向から撮像する撮像装置と、
を備える実装装置の制御方法であって、
前記撮像装置で前記ノズルに保持された前記電子部品を撮像することと、
前記撮像装置により撮像された撮像画像から前記電子部品を認識することと、
認識された前記電子部品の位置の初期位置からのずれ量を算出して記憶することと、
過去のずれ量に対する最後に取得したずれ量の変化量が閾値を超える前記ノズルがあるか否かを判定することと、
前記ずれ量を算出した前記ノズルのうち全てのノズルでずれ量の変化量が前記閾値を超えるか否かを判定することと、
前記ずれ量のずれ方向の正負が同じであるか否かを判定することと、
を含む、
実装装置の制御方法。
【請求項6】
前記実装装置は、前記複数のノズルのうち1つのノズルに変えて装着可能な補助治具ノズルをさらに備え、
前記撮像装置で前記補助治具ノズルを撮像することと、
前記撮像装置により撮像された撮像画像から前記補助治具ノズルの中心位置を認識することと、
認識された前記補助治具ノズルの中心位置に基づいて、前記回転軸の回転方向の原点を補正する補正量を算出することと、
を含む、
請求項5に記載の実装装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、実装装置及び実装装置の制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
実装装置に係る技術分野において、複数のノズルを周方向に並べたタレット型の実装ヘッドが知られている(例えば、特許文献1参照)。このような実装ヘッドは、回転軸が鉛直方向から傾いたタレット基台の周囲に配置された複数のノズルが、タレット基台の回転に伴って旋回し、最下位置のノズルのみノズルの駆動軸が鉛直方向を向くように構成される。タレット基台は、例えば、ギア駆動によって旋回する。
【先行技術文献】
【特許文献】
【0003】
特開2022-091054号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、タレット型の実装ヘッドでは、旋回軸の回転方向の原点が生産中やメンテナンス後に突発的にギアずれすることがあるため、定期的に治具ノズルを使用してずれ量を計測して角度補正している。従来では、予め定められた間隔で補正を実行するが、補正直後にギアずれを起こした場合、次の補正周期までノズルの駆動軸の位置がずれた状態で生産が継続してしまい、部品の搭載位置ずれが発生し品質不良に繋がる可能性があった。
【0005】
本明細書で開示する技術は、タレット型の実装ヘッドにおいて位置ずれが発生した場合に迅速に補正することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、実装装置を開示する。実装装置は、基板に実装する電子部品を保持する複数のノズルと、前記複数のノズルを周縁部で支持するタレットを有する実装ヘッドと、前記タレットに対して前記複数のノズルのそれぞれを駆動軸と平行な方向に移動させるとともに回転軸を中心として前記タレットを旋回させるノズル駆動装置と、前記実装ヘッドに支持されて前記ノズルに保持された前記電子部品を当該ノズルの駆動軸と平行な方向から撮像する撮像装置と、制御装置と、を備え、制御装置は、前記撮像装置により撮像された撮像画像から認識された前記電子部品の位置の初期位置からのずれ量を算出して記憶し、前記ずれ量を算出した前記複数のノズルにおいて、過去のずれ量に対する最後に取得したずれ量の変化量が閾値を超え、かつずれ方向の正負が同じである場合、前記回転軸の回転方向の原点を補正する補正処理が必要であると判定する。
【発明の効果】
【0007】
本明細書で開示する技術によれば、タレット型の実装ヘッドにおいて位置ずれが発生した場合に迅速に補正することができる。
【図面の簡単な説明】
【0008】
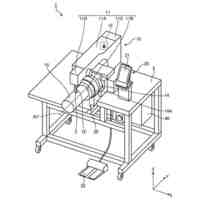
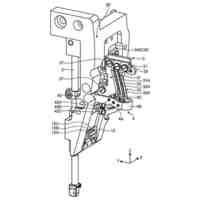
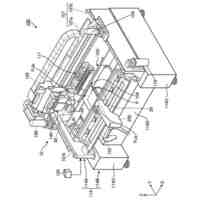
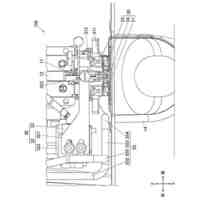
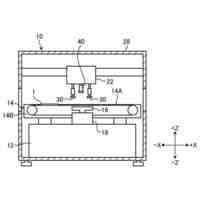
図1は、実施形態に係る実装装置を模式的に示す側面図である。
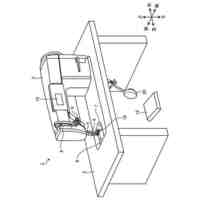
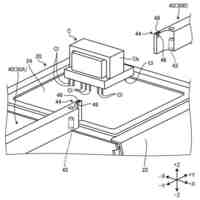
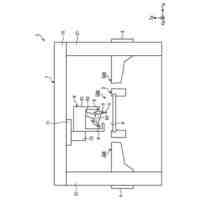
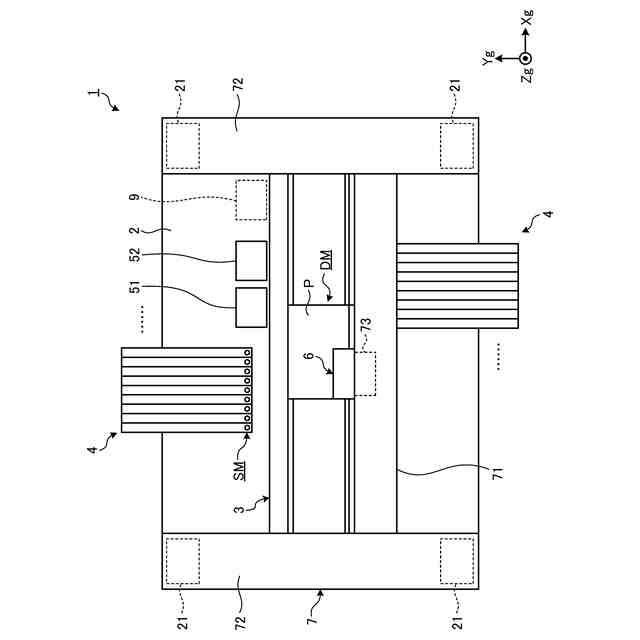
図2は、実施形態に係る実装装置を模式的に示す平面図である。
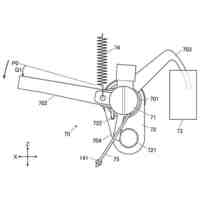
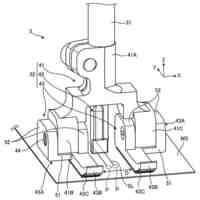
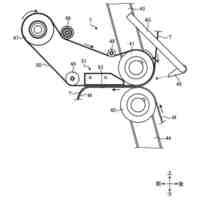
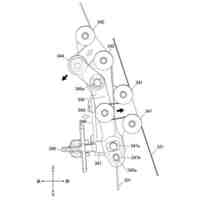
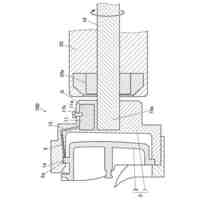
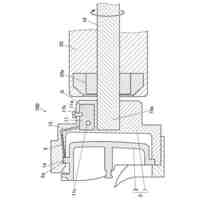
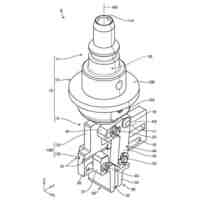
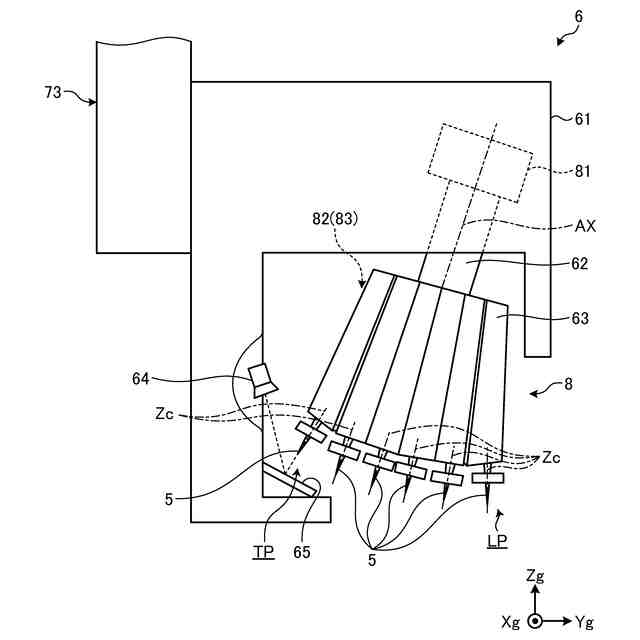
図3は、実施形態に係る実装ヘッドを示す側面図である。
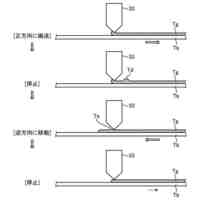
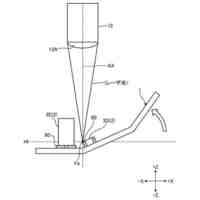
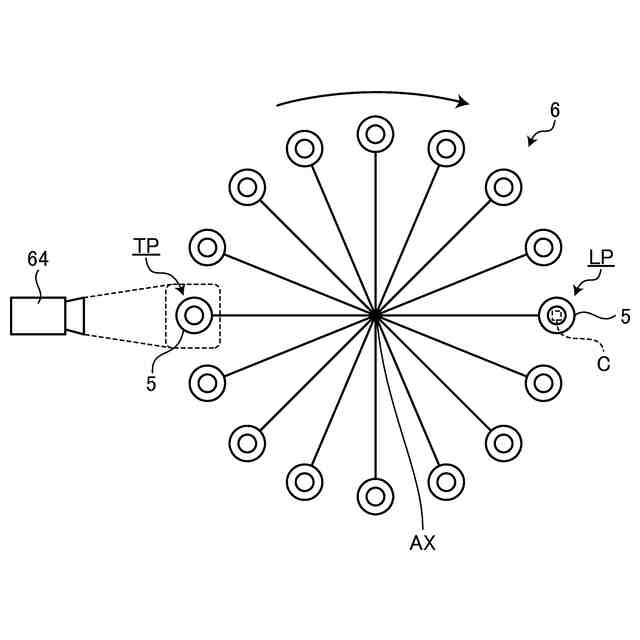
図4は、実施形態に係る実装ヘッドの動作を説明するための図である。
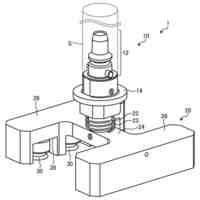
図5は、実施形態に係る補助治具ノズルを示す模式図である。
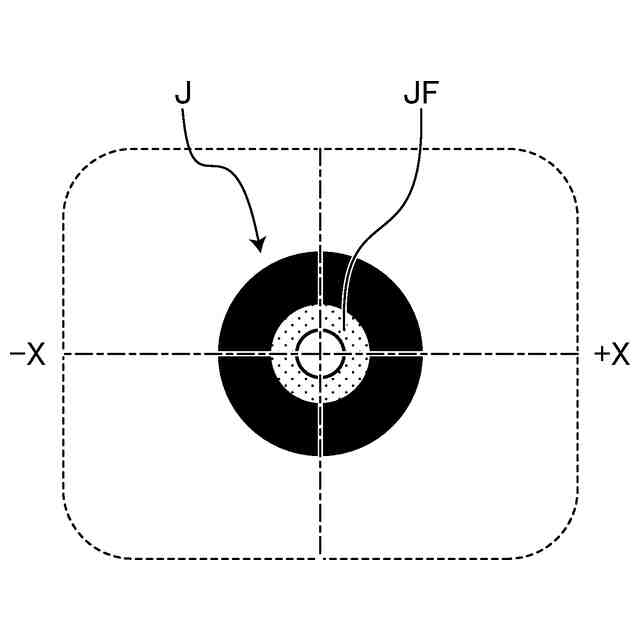
図6は、撮像装置による撮像画像の一例を示す図である。
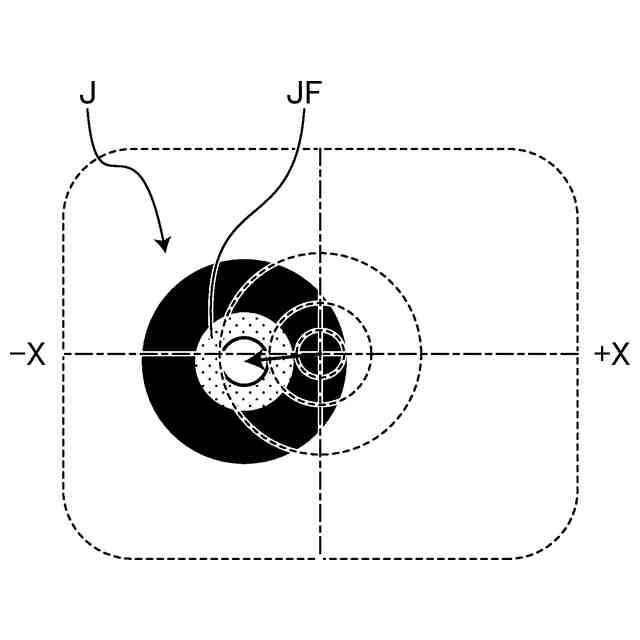
図7は、撮像装置による撮像画像の一例を示す図である。
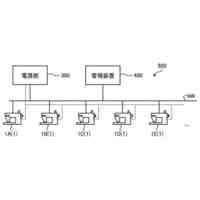
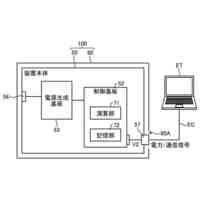
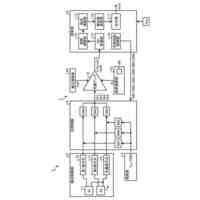
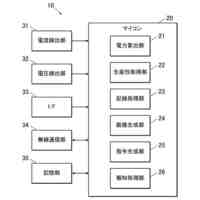
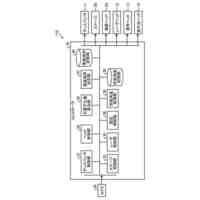
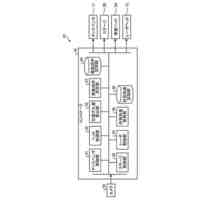
図8は、実施形態に係る制御装置を示す機能ブロック図である。
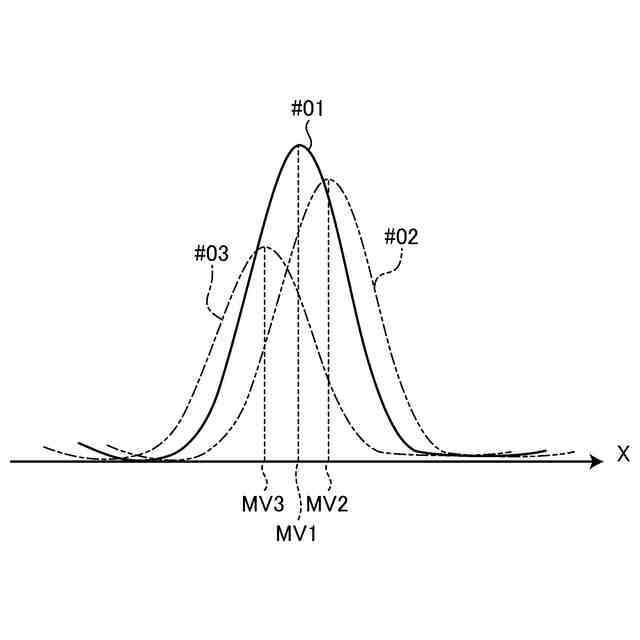
図9は、実施形態に係るずれ量のヒストグラムに対応する正規分布曲線を示す図である。
図10は、実施形態に係るずれ量のヒストグラムに対応する正規分布曲線を示す図である。
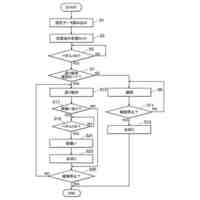
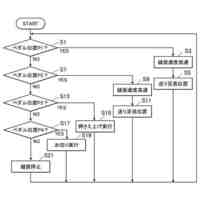
図11は、実施形態に係る実装処理を示すフローチャートである。
図12は、実施形態に係る認識処理を示すフローチャートである。
図13は、実施形態に係る判定処理を示すフローチャートである。
図14は、実施形態に係る補正処理を示すフローチャートである。
図15は、実施形態に係るコンピュータシステムを示すブロック図である。
【発明を実施するための形態】
【0009】
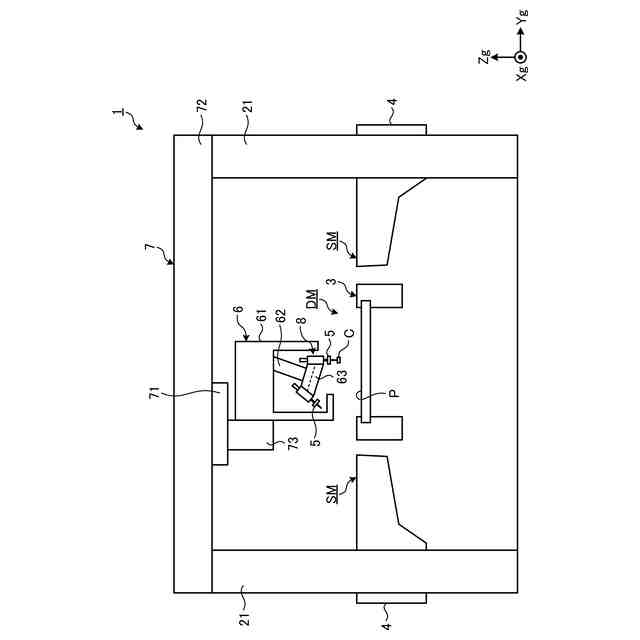
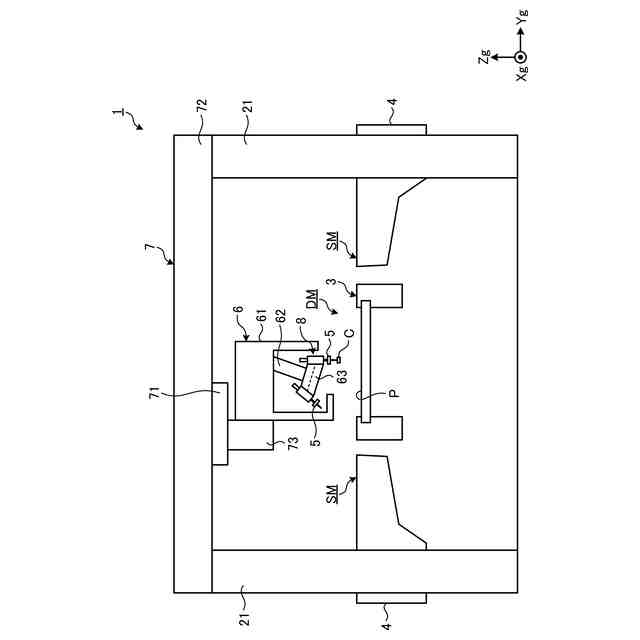
以下、実施形態について図面を参照しながら説明する。実施形態においては、XgYgZg直交座標系を規定し、このXgYgZg直交座標系を参照しながら各部の位置関係について説明する。所定面のXg軸に平行な方向をXg軸方向とする。Xg軸に直交する所定面のYg軸に平行な方向をYg軸方向とする。所定面に直交するZg軸に平行な方向をZg軸方向とする。Xg軸方向を中心とする回転方向又は傾斜方向をθXg方向とする。Yg軸方向を中心とする回転方向又は傾斜方向をθYg方向とする。Zg軸方向を中心とする回転方向又は傾斜方向をθZg方向とする。実施形態において、所定面と水平面とは平行である。Zg軸は鉛直軸に平行であり、Zg軸方向は上下方向である。+Zg側は上側であり、-Zg側は下側である。なお、所定面は、水平面に対して傾斜してもよい。また、実施形態においては、Xg軸及びYg軸を含む所定面を適宜、XgYg平面、と称する。
【0010】
[実装装置]
図1は、実施形態に係る実装装置1を模式的に示す側面図である。図2は、実施形態に係る実装装置1を模式的に示す平面図である。実装装置1は、基板P上に電子部品Cを実装するための装置である。図1及び図2に示すように、実装装置1は、ベース部材2と、基板搬送装置3と、部品供給装置4と、ノズル5及び補助治具ノズルJを収納するノズル収納部51と、電子部品Cを貯留する部品貯留部52と、ノズル5を有する実装ヘッド6と、ヘッド移動装置7と、ノズル移動装置8と、制御装置9とを備える。また、実装装置1は、オペレータが操作するための不図示の操作装置や、各種情報を表示する不図示の表示装置、光や音による警報を発生する警告装置等をさらに備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
26日前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
基板作業装置
25日前
JUKI株式会社
部品実装装置
25日前
JUKI株式会社
縫製システム
2か月前
JUKI株式会社
上下送りミシン
25日前
JUKI株式会社
ミシン制御装置
2か月前
JUKI株式会社
差動送りミシン
1か月前
JUKI株式会社
ボンディング装置
24日前
JUKI株式会社
ボンディング装置
24日前
JUKI株式会社
縁かがり縫いミシン
1か月前
JUKI株式会社
ボタン付け縫製装置
1か月前
JUKI株式会社
縁かがり縫いミシン
3か月前
JUKI株式会社
ミシンの糸切り装置
26日前
JUKI株式会社
磁気検出回路及びミシン
25日前
JUKI株式会社
被縫製物の位置決め装置
24日前
JUKI株式会社
ミシンの消費電力分析装置
2か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
ミシン釜のグリース供給構造
1か月前
JUKI株式会社
リード矯正装置及び実装装置
26日前
JUKI株式会社
グリップ装置及び部品実装装置
1か月前
JUKI株式会社
実装装置及び実装装置の制御方法
1か月前
JUKI株式会社
工業用ミシン及びユーザ認証方法
2か月前
JUKI株式会社
実装装置及び実装装置の制御方法
1か月前
JUKI株式会社
3次元実装装置及び3次元実装方法
24日前
JUKI株式会社
縫製管理システム及び縫製管理方法
24日前
JUKI株式会社
3次元実装装置及び3次元実装方法
24日前
JUKI株式会社
3次元実装装置及び3次元実装方法
24日前
JUKI株式会社
縫製管理システム及び縫製管理方法
2か月前
JUKI株式会社
部品吸着ノズル及びノズル収納装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ