TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025039197
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023146102
出願日
2023-09-08
発明の名称
制御システム
出願人
学校法人 名古屋電気学園
,
トヨタ自動車株式会社
代理人
個人
主分類
B25J
9/10 20060101AFI20250313BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットのアーム部を速やかに制御することに寄与する制御システムを提供する。
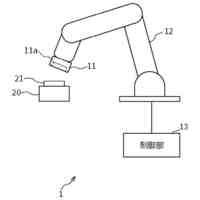
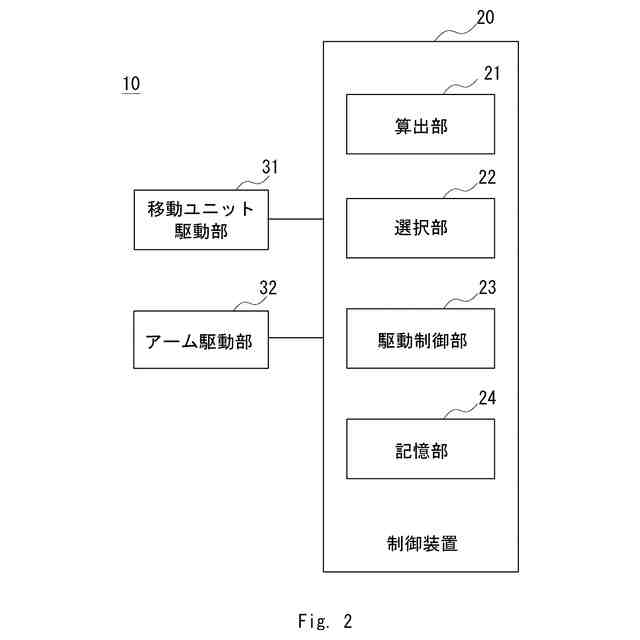
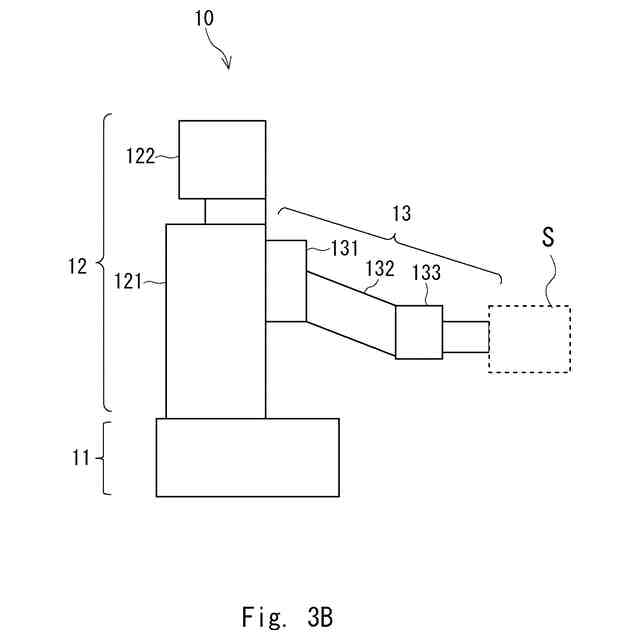
【解決手段】一実施形態にかかるロボット10は、移動ユニット11と、移動ユニット11に設けられたアーム部13と、制御装置20とを備える。制御装置20は、移動ユニット11の移動先の候補となる位置を含むマップを構成する複数の単位領域について、アーム部13の目標位置にアーム部13が到達する逆運動学上の解の有無を単位領域毎に算出する算出部21と、単位領域毎の解の有無の算出結果に基づいて、複数の単位領域の中から、移動ユニット11の移動先の位置を選択する選択部22を有する。
【選択図】図2
特許請求の範囲
【請求項1】
移動部と、前記移動部に設けられたアーム部とを備えるロボットの制御システムであって、
前記移動部の移動先の候補となる位置を含むマップを構成する複数の単位領域について、前記アーム部の目標位置に前記アーム部が到達する逆運動学上の解の有無を前記単位領域毎に算出する算出部と、
前記単位領域毎の解の有無の算出結果に基づいて、前記複数の単位領域の中から、前記移動部の移動先の位置を選択する選択部と、を備える
制御システム。
続きを表示(約 630 文字)
【請求項2】
前記選択部は、
前記単位領域毎の解の有無の算出結果に基づいて、前記複数の単位領域の各々について、その単位領域の近傍に位置する単位領域のうち解が存在する単位領域の個数を評価値として算出し、
前記複数の単位領域における前記評価値に基づいて、前記複数の単位領域の中から、前記移動部の移動先の位置を選択する、
請求項1に記載の制御システム。
【請求項3】
前記算出部は、
前記複数の単位領域についての前記解の有無を、前記解の性質に応じて分類される複数のモード毎に、前記単位領域毎に算出し、
前記モード毎における前記単位領域毎の解の有無の算出結果に基づいて、前記複数のモードから1のモードを選択し、
前記選択部は、選択された前記1のモードにおける前記単位領域毎の解の有無の算出結果に基づいて、前記複数の単位領域の中から、前記移動部の移動先の位置を選択する、
請求項1又は2に記載の制御システム。
【請求項4】
前記算出部は、逆運動学上の解の有無が算出される対象となる単位領域を、前記目標位置と前記アーム部の長さとに基づいて決定する、
請求項1又は2に記載の制御システム。
【請求項5】
前記算出部は、前記移動部が移動できない領域を、逆運動学上の解の有無が算出される対象となる単位領域から除外する、
請求項1又は2に記載の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
ロボットについて、その制御をより正確に実行するための技術が開発されている。
【0003】
例えば、特許文献1には、移動マニピュレータの姿勢最適化方法として、以下が示されている。移動マニピュレータは、把持対象物を把持するための移動マニピュレータの姿勢を設定し、確率的な誤差を含む台車及びマニピュレータの移動後の手先姿勢の推定値を算出し、把持対象物を把持することが可能な手先姿勢である把持可能領域を算出する。その後、移動マニピュレータは、移動後の手先姿勢の推定値と把持対象物の物体姿勢を境界の両端とする修正領域を算出し、把持可能領域と修正領域との重複範囲の中に手先を移動修正した場合の修正後の手先姿勢を設定する。そして、移動マニピュレータは、移動後の手先姿勢の推定値と余裕領域の中の手先姿勢の確率的な距離の積分を用いて、移動マニピュレータの姿勢を最適化する。
【先行技術文献】
【特許文献】
【0004】
特開2022-135512号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の通り、特許文献1に記載の技術では、台車及びマニピュレータの移動に伴う誤差を考慮して、姿勢の最適化を図っている。しかしながら、この技術では、最適化に伴う計算量が多くなってしまい、速やかな制御ができなくなる可能性があった。
【0006】
本開示は、このような問題を解決するためのものであり、ロボットのアーム部を速やかに制御することに寄与する制御システムを提供するものである。
【課題を解決するための手段】
【0007】
本開示の例示的な一態様に係る制御システムは、移動部と、移動部に設けられたアーム部とを備えるロボットの制御システムである。制御システムは、移動部の移動先の候補となる位置を含むマップを構成する複数の単位領域について、アーム部の目標位置にアーム部が到達する逆運動学上の解の有無を単位領域毎に算出する算出部と、単位領域毎の解の有無の算出結果に基づいて、複数の単位領域の中から、移動部の移動先の位置を選択する選択部と、を備える。このように、ロボットのアーム部を制御するための解を導出するためには、単位領域で構成されたマップを用いて解の有無を算出した結果を使用すればよい。そのため、導出に必要な計算量を少なくすることができる。したがって、制御システムは、ロボットのアーム部を速やかに制御することに寄与することができる。なお、この制御システムは、一例として、機械学習の手法(例えば、学習モデルをシステムで更新する手法)によって、計算を実行することが可能である。
【発明の効果】
【0008】
本開示により、ロボットのアーム部を速やかに制御することに寄与する制御システムを提供することができる。
【図面の簡単な説明】
【0009】
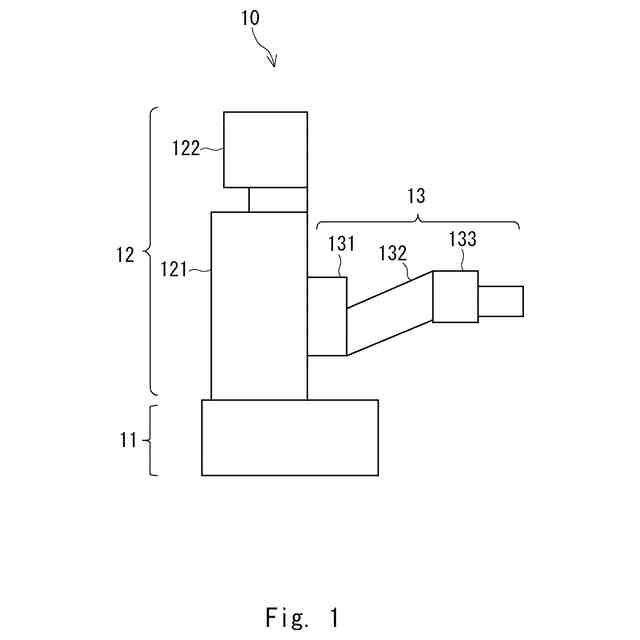
本開示にかかるロボットの一例を示す側面図である。
本開示にかかるロボットの一例を示すブロック図である。
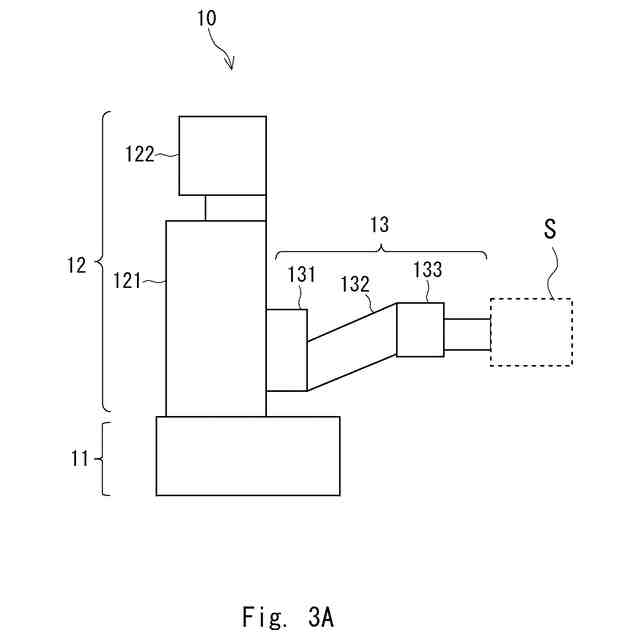
本開示にかかるアーム部が形成する姿勢の一例を示す。
本開示にかかるアーム部が形成する姿勢の他の例を示す。
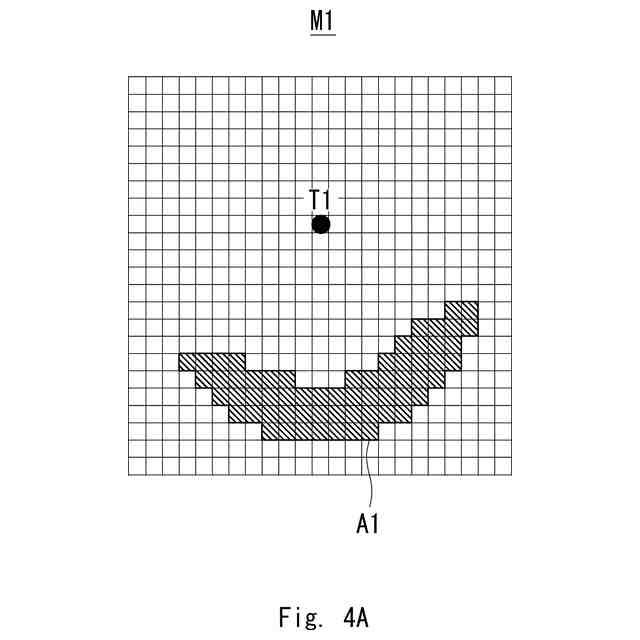
図3Aの状態における各単位領域の解の有無の一例を示すグリッドマップである。
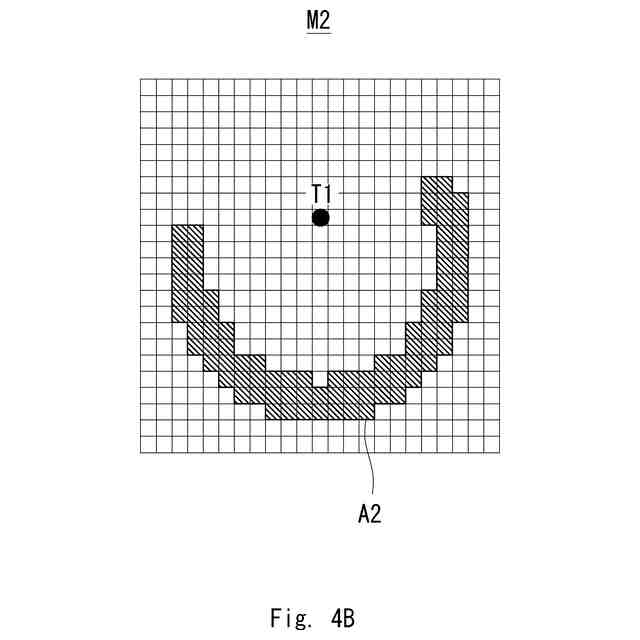
図3Bの状態における各単位領域の解の有無の一例を示すグリッドマップである。
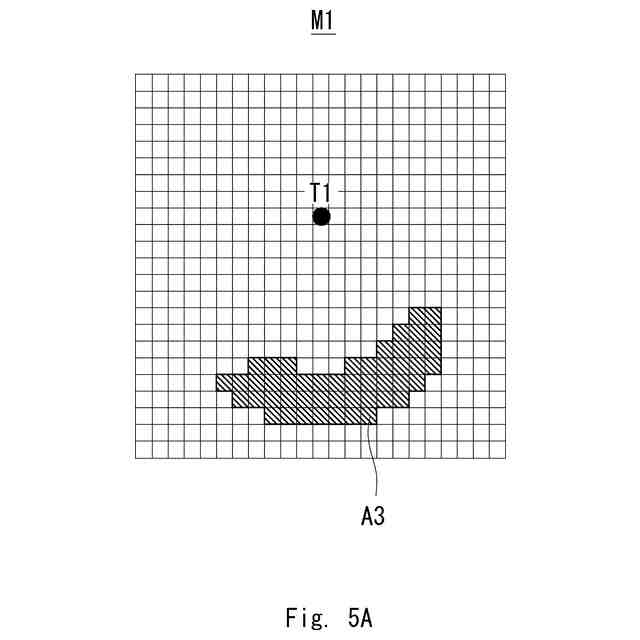
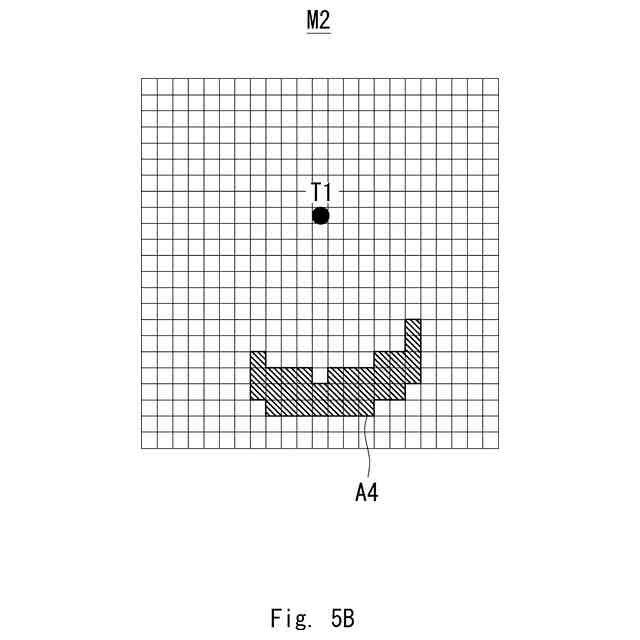
図4Aから、解のうちアーム部が障害物と接触するものが除外されたグリッドマップである。
図4Bから、解のうちアーム部が障害物と接触するものが除外されたグリッドマップである。
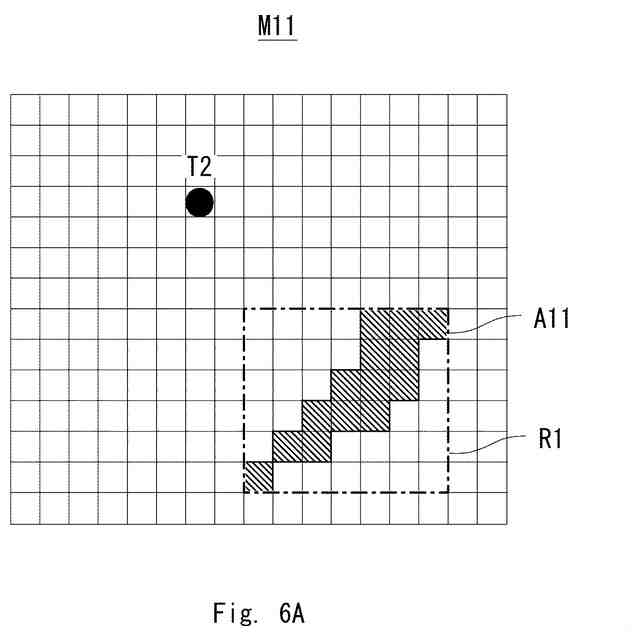
各単位領域の解の有無の一例を示すグリッドマップである。
図6Aの解領域における各単位領域の評価値を示す。
本開示にかかる制御装置の処理の一例を示すフローチャートである。
本開示にかかる制御装置のハードウェア構成の一例を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本開示の実施の形態について説明する。なお、実施の形態における以下の記載及び図面は、説明の明確化のため、適宜、省略及び簡略化がなされている。実施の形態で参照される各図面は、1又はそれ以上の実施形態を説明するための単なる例示である。例示的な実施形態を説明するためにいずれか1つの図に示された特徴またはステップのすべてが必ずしも必須ではなく、一部の特徴またはステップが省略されてもよい。いずれかの図に記載されたステップの順序は、適宜変更されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
17日前
株式会社アイセイ
搬送装置
23日前
株式会社マキタ
電動工具
1か月前
株式会社不二越
ロボット
9日前
国立大学法人金沢大学
ロボット
29日前
個人
けがき用治具
11日前
個人
深孔スリーブ駆動ロッド構造
1日前
株式会社不二越
ロボット操作装置
8日前
川崎重工業株式会社
ロボット
9日前
株式会社ケー・エフ・シー
締結構造
1か月前
個人
バール
1日前
日本信号株式会社
作業機制御システム
1か月前
株式会社デンソー
操縦桿
9日前
川崎重工業株式会社
ロボットシステム
17日前
株式会社黒澤鉄工製作所
けがき用治具
11日前
梅馨堂合同会社
人協働ロボットシステム
3日前
株式会社京阪エンジニアリング
脱着装置
1か月前
株式会社不二越
基板搬送用ロボット
18日前
アピュアン株式会社
衝撃工具
24日前
ARMA株式会社
UI付エンドエフェクタ
4日前
株式会社スター精機
ワーク搬送装置
1か月前
株式会社マキタ
集塵アタッチメント
1か月前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
株式会社コスメック
把持装置
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社不二越
ロボットビジョンシステム
1か月前
原利興工業有限公司
工具用スリーブ
29日前
株式会社マキタ
作業機
29日前
株式会社マキタ
電動工具
23日前
株式会社マキタ
電動工具
23日前
株式会社マキタ
電動工具
23日前
株式会社マキタ
電動工具
23日前
若井ホールディングス株式会社
レンチ構造とその製造方法
11日前
株式会社マキタ
電動工具
23日前
株式会社マキタ
作業機
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ