TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025028534
公報種別
公開特許公報(A)
公開日
2025-03-03
出願番号
2023133394
出願日
2023-08-18
発明の名称
ロボット制御システム
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250221BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットがハンド部でターゲットを保持する際に、ターゲットに対するハンド部の位置決めを高精度に行うことができるようにする。
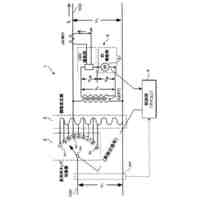
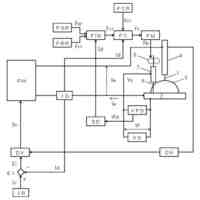
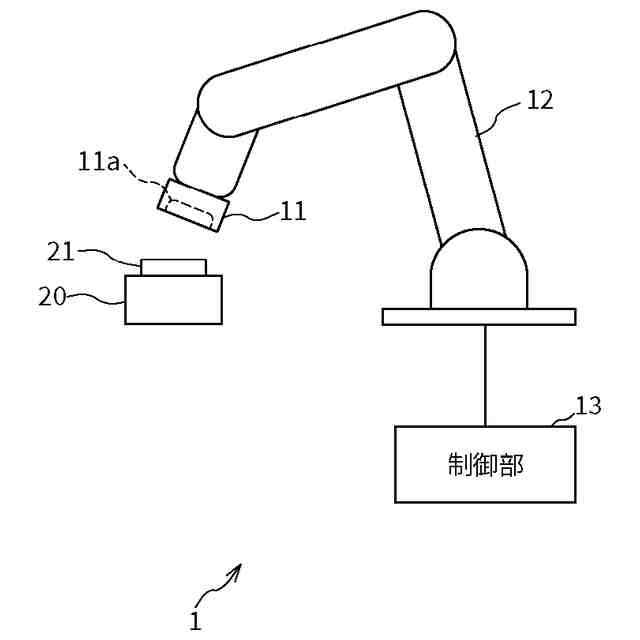
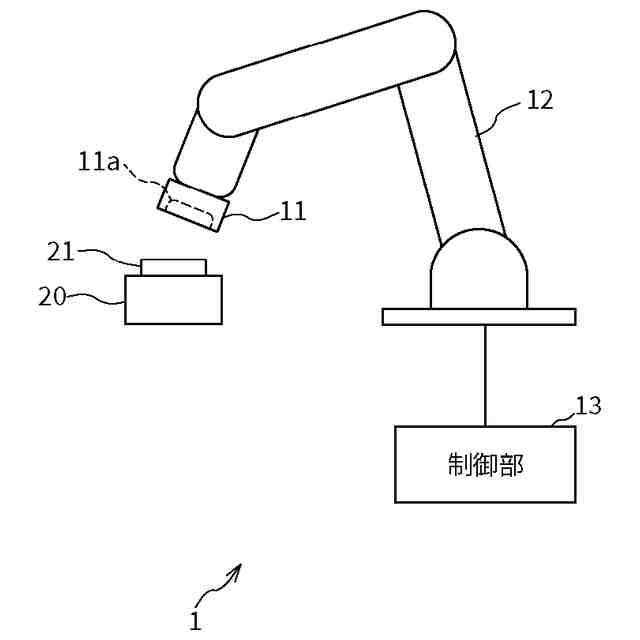
【解決手段】ロボット制御システム1は、電磁石11aを有するハンド部11と、ハンド部11を移動させるためのロボット12と、ロボット12を制御することによってハンド部11を移動させる制御部13とを備え、制御部13は、電磁石11aが磁着する対象である磁着対象21を有するターゲット20の近傍にハンド部11を移動させた状態でロボット12を外力追従モードに切り替え、電磁石11aが磁着対象21に磁着した後にロボット12を位置制御モードに切り替えてハンド部11を移動させる。
【選択図】図1
特許請求の範囲
【請求項1】
電磁石を有するハンド部と、
前記ハンド部を移動させるためのロボットと、
前記ロボットを制御することによって前記ハンド部を移動させる制御部と、を備え、
前記制御部は、前記電磁石が磁着する対象である磁着対象を有するターゲットの近傍に前記ハンド部を移動させた状態で前記ロボットを外力追従モードに切り替え、前記電磁石が前記磁着対象に磁着した後に前記ロボットを位置制御モードに切り替えて前記ハンド部を移動させる、ロボット制御システム。
続きを表示(約 480 文字)
【請求項2】
前記ハンド部は、前記電磁石が前記磁着対象に磁着した後に、前記ターゲットを保持する保持手段をさらに有する、請求項1記載のロボット制御システム。
【請求項3】
前記磁着対象は、電磁石、永久磁石、強磁性体のいずれかである、請求項1記載のロボット制御システム。
【請求項4】
前記制御部は、前記ハンド部が前記磁着対象に近づくのに応じて前記電磁石の磁力が弱くなるように制御する、請求項1記載のロボット制御システム。
【請求項5】
前記ロボットは、前記ハンド部に掛かる力を測定するための力センサをさらに有し、
前記制御部は、前記ロボットを外力追従モードで制御する際に、前記力センサによって測定された外力が0になるように前記ロボットを制御する、請求項1記載のロボット制御システム。
【請求項6】
前記ハンド部は、2個以上の電磁石を有しており、
前記ターゲットは、極性の異なる2個の磁着対象を少なくとも有している、請求項1から請求項5のいずれか記載のロボット制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ハンド部によってターゲットを保持するロボット制御システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ロボットが高精度な作業を行うためには、ロボットの位置決めをより高精度に行う必要がある。そのため、例えば、無人搬送車によって搬送可能なロボットにおいて、床面に設けられた孔に位置決めピンを挿入することによる高精度な位置決めが行われている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-082233号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された方法によって、ロボットの位置決めを高精度に行うことはできるが、例えば、ロボットが搬送等の作業を行う対象となるターゲットと、ロボットとの位置決めが正確にできていない場合には、その作業の精度が低下するという問題がある。
【0005】
本発明は、上記課題を解決するためになされたものであり、ロボットがハンド部でターゲットを保持する際に、ターゲットに対するハンド部の位置決めを高精度に行うことができるロボット制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様によるロボット制御システムは、電磁石を有するハンド部と、ハンド部を移動させるためのロボットと、ロボットを制御することによってハンド部を移動させる制御部と、を備え、制御部は、電磁石が磁着する対象である磁着対象を有するターゲットの近傍にハンド部を移動させた状態でロボットを外力追従モードに切り替え、電磁石が磁着対象に磁着した後にロボットを位置制御モードに切り替えてハンド部を移動させる、ものである。
【発明の効果】
【0007】
本発明の一態様によるロボット制御システムによれば、外力追従モードのロボットにおいて、ハンド部の電磁石と、ターゲットが有する磁着対象とを磁着させることにより、ハンド部がターゲットを保持する際に、両者をあらかじめ決められた位置関係とすることができ、ターゲットに対するハンド部の位置決めを高精度に行うことができる。
【図面の簡単な説明】
【0008】
本発明の実施の形態によるロボット制御システムの構成を示す模式図
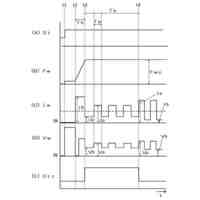
同実施の形態によるロボット制御システムの動作を示すフローチャート
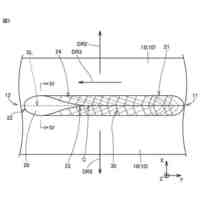
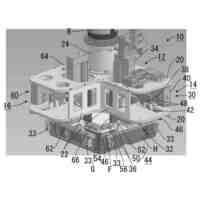
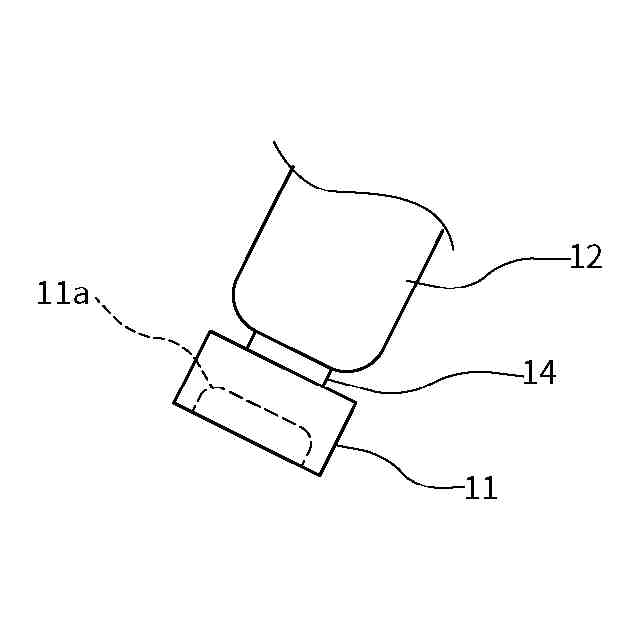
同実施の形態におけるロボットの一例を示す斜視図
同実施の形態におけるハンド部が有する電磁石の一例を示す図
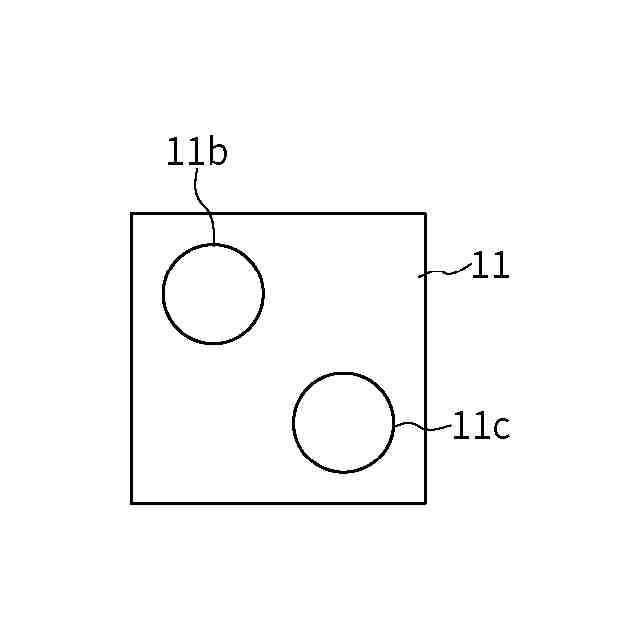
同実施の形態におけるターゲットが有する磁着対象の一例を示す図
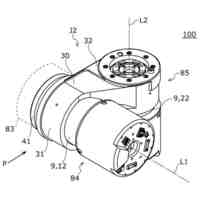
同実施の形態における力センサを有するロボットの一例を示す図
【発明を実施するための形態】
【0009】
以下、本発明によるロボット制御システムについて、実施の形態を用いて説明する。なお、以下の実施の形態において、同じ符号を付した構成要素及びステップは同一または相当するものであり、再度の説明を省略することがある。本実施の形態によるロボット制御システムは、外力追従モードのロボットにおいて、ハンド部が有する電磁石と、ターゲットが有する磁着対象とを磁着させることによって、ハンド部とターゲットとの位置決めを高精度に行うことができるものである。
【0010】
図1は、本実施の形態によるロボット制御システム1の構成を示す模式図である。本実施の形態によるロボット制御システム1は、ハンド部11と、ハンド部11を移動させるためのロボット12と、ロボット12を制御するための制御部13とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
電圧調整装置
8日前
株式会社ダイヘン
無線給電システム
8日前
株式会社ダイヘン
多層盛り溶接方法
10日前
株式会社ダイヘン
金属材料の分離方法
1日前
株式会社ダイヘン
制御装置、および、蓄電池システム
12日前
株式会社ダイヘン
非消耗電極アーク溶接の溶接開始方法
10日前
株式会社ダイヘン
パルスアーク溶接のアークスタート制御方法
10日前
OMC株式会社
ロボット
23日前
株式会社クレスコ
補助吸着具
16日前
株式会社不二越
ロボット
8日前
株式会社エビス
腰ベルト用連結具
23日前
個人
深孔スリーブ駆動ロッド構造
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社イノウ
給油口キャップ用開閉具
9日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
川崎重工業株式会社
制動システム
8日前
住友重機械工業株式会社
ロボット
2日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
9日前
芝浦機械株式会社
双腕ロボット
1日前
アイホン株式会社
ネジ締めカウントシステム
10日前
パナソニック株式会社
工具
9日前
パナソニック株式会社
工具
9日前
株式会社デンソーウェーブ
ロボット制御システム
29日前
アピュアン株式会社
エアー式衝撃工具
26日前
学校法人法政大学
装着型アシスト装置
1か月前
株式会社マキタ
作業機
1か月前
住友重機械工業株式会社
ロボット及びカバー
2日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
10日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
2日前
住友重機械工業株式会社
アクチュエータ支持部材
1日前
株式会社マキタ
インパクト工具
24日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
24日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ