TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025026117
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131494
出願日
2023-08-10
発明の名称
作業機制御システム
出願人
日本信号株式会社
代理人
個人
主分類
B25J
3/00 20060101AFI20250214BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 ロボット等の作業機を作業床等の移動体に搭載した際において、作業機(ロボット等)や移動体(作業床等)について、的確な動作の維持を可能にする作業機制御システムを提供すること。
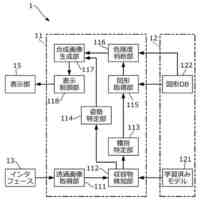
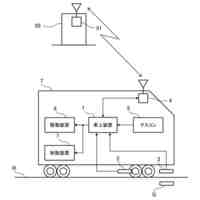
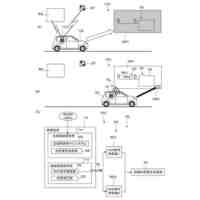
【解決手段】 作業機制御システム100は、作業機WM(作業用ロボット10等)と、作業機WMを移動させる移動体MB(作業車20等)と、作業機WMの操作と移動体MBの操作とについてモード切替えを行う切替部SWと、作業機WMの操作と移動体MBの操作とを、切替部SWによるモード切替えに応じて行うコントローラ52とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
作業機と、
前記作業機を移動させる移動体と、
前記作業機の操作と前記移動体の操作とについてモード切替えを行う切替部と、
前記作業機の操作と前記移動体の操作とを、前記切替部による前記モード切替えに応じて行うコントローラと
を備える作業機制御システム。
続きを表示(約 640 文字)
【請求項2】
前記作業機は、作業用ロボットであり、
前記移動体は、前記作業用ロボットを載置した状態で伸縮及び旋回する機能を有する作業車である、請求項1に記載の作業機制御システム。
【請求項3】
前記切替部は、フットスイッチをオンオフすることをトリガとして、前記モード切替えを行う、請求項1に記載の作業機制御システム。
【請求項4】
前記コントローラは、操作者が両手で把持するハンドコントローラであり、操作者が握ることで動作可能になる、請求項1に記載の作業機制御システム。
【請求項5】
前記切替部は、操作者による前記コントローラの把持を検出した場合、現状操作の継続を優先し、前記モード切替えを行わない、請求項1に記載の作業機制御システム。
【請求項6】
前記作業機に設けられて外界を撮像する撮像部と、
前記撮像部による撮像画像を表示する頭部搭載型表示部と
を備える、請求項1に記載の作業機制御システム。
【請求項7】
前記頭部搭載型表示部は、前記作業機の操作と前記移動体の操作とに関する画像を、前記撮像画像に重畳して表示する、請求項6に記載の作業機制御システム。
【請求項8】
前記頭部搭載型表示部は、姿勢検知部を有し、
前記作業機は、前記姿勢検知部での検知結果に応じて、前記撮像部の撮像範囲を変更する、請求項6に記載の作業機制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作による作業用ロボット等の作業機の動作制御を行うための作業機制御システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
例えば、遠隔操作に関するものとして、スレーブ制御装置の操作における作業性向上に関するものや(特許文献1参照)、ブーム等を備えるクレーン装置の操作に関するもの(特許文献2参照)が知られている。
【先行技術文献】
【特許文献】
【0003】
特開平8-257948号公報
特開2019-172409号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1、2では、例えばブーム等の操作を行う高所作業車の作業床上に遠隔操作のロボットがある、といった場合についての具体的な操作手法といったことについてまでは、言及されていない。
【0005】
本発明は上記した点に鑑みてなされたものであり、ロボット等の作業機を作業床等の移動体に搭載した際において、作業機(ロボット等)や移動体(作業床等)について、的確な動作の維持を可能にする作業機制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための作業機制御システムは、作業機と、作業機を移動させる移動体と、作業機の操作と移動体の操作とについてモード切替えを行う切替部と、作業機の操作と移動体の操作とを、切替部によるモード切替えに応じて行うコントローラとを備える。
【0007】
上記作業機制御システムでは、コントローラによって作業機の操作と移動体の操作とを、切替部によるモード切替えに応じて行うことで、移動体によって作業機を移動させつつ作業を行う態様において、的確な動作の維持が可能になる。
【0008】
本発明の具体的な側面では、作業機は、作業用ロボットであり、移動体は、作業用ロボットを載置した状態で伸縮及び旋回する機能を有する作業車である。この場合、作業用ロボットの動作と、作業車の動作とについて、適切な切替えが可能となり、コントローラによる各動作の的確な維持が可能になる。
【0009】
本発明の別の側面では、切替部は、フットスイッチをオンオフすることをトリガとして、モード切替えを行う。この場合、フットスイッチを利用することで、安全かつ確実に動作を切り替えることができる。
【0010】
本発明のさらに別の側面では、コントローラは、操作者が両手で把持するハンドコントローラであり、操作者が握ることで動作可能になる。この場合、操作者が両手で把持し、かつ、握ったことが検知されて動作が開始されるので、誤動作を抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本信号株式会社
表示装置
19日前
日本信号株式会社
列車の車上装置
14日前
日本信号株式会社
ホーム検知装置及びホーム検知システム
今日
日本信号株式会社
ダイヤ不整合の検出装置及び検出プログラム
19日前
日本信号株式会社
ナビゲーションシステム及びナビゲーションプログラム
6日前
OMC株式会社
ロボット
11日前
株式会社アイセイ
搬送装置
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
4日前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
1か月前
個人
深孔スリーブ駆動ロッド構造
24日前
株式会社エビス
腰ベルト用連結具
11日前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
19日前
個人
バール
24日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
株式会社デンソー
操縦桿
1か月前
梅馨堂合同会社
人協働ロボットシステム
26日前
株式会社不二越
基板搬送用ロボット
1か月前
アピュアン株式会社
衝撃工具
1か月前
ARMA株式会社
UI付エンドエフェクタ
27日前
株式会社デンソーウェーブ
ロボット制御システム
17日前
アピュアン株式会社
エアー式衝撃工具
14日前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
株式会社マキタ
作業機
1か月前
学校法人法政大学
装着型アシスト装置
21日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
三菱電機株式会社
トルク締め個所検出システム
24日前
株式会社マキタ
打ち込み工具
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ