TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025023446
公報種別
公開特許公報(A)
公開日
2025-02-17
出願番号
2023127561
出願日
2023-08-04
発明の名称
ワーク搬送装置
出願人
株式会社スター精機
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250207BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡単な構成でワークの位置検出を行うことができるワーク搬送装置を提供すること。
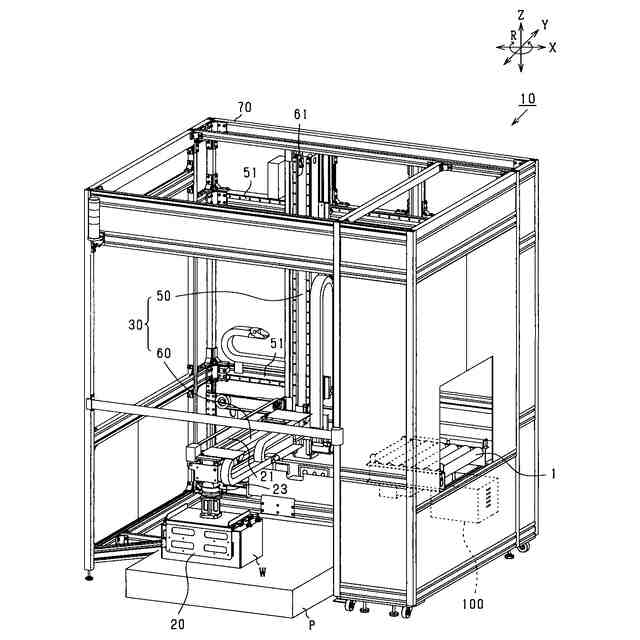
【解決手段】デパレタイズ装置10は、ワークWを把持するチャック20と、チャック20を移動させる搬送機構30と、チャック20及び搬送機構30を制御する制御装置100と、距離を測定するレーザセンサと、を備える。制御装置100は、デパレタイズを実施させる場合、基準点を基準として記憶されたチャック20の移動方向及び移動距離に基づいて、搬送機構30によりチャック20を移動させた後、チャック20によりワークWを把持させるものであって、デパレタイズを実施する前、パレットP上に載置されたワークWの上方において、レーザセンサを水平移動させながら対象物までの上下方向における距離を測定し、測定結果に基づいてワーク端を検出し、検出したワーク端に基づいて基準点の水平方向における位置を補正するものである。
【選択図】 図1
特許請求の範囲
【請求項1】
複数のワークが一塊となってパレット上に載置されたワーク群をデパレタイズするワーク搬送装置において、
前記ワーク群を構成する各ワークは、パレタイズされる際に、直交する2方向に1列又は複数列に並べられ、かつ、前記パレット上において設定された基準点に対して各ワークの相対位置が予め決められるようになっており、
前記ワークを把持するチャック部と、
前記チャック部を移動させる移動部と、
前記基準点に対して、前記パレタイズ時における各ワークの相対的な位置情報を記憶する記憶部と、
前記デパレタイズを実施させる場合、前記記憶部に記憶された各ワークの前記位置情報に基づいて、前記移動部により前記チャック部を移動させた後、前記チャック部により前記ワークを把持させるように、前記チャック部及び前記移動部を制御する演算処理装置と、
距離を測定する測距センサと、を備え、
前記演算処理装置は、前記デパレタイズを実施する前、前記パレット上に載置された前記ワーク群の上方において、前記測距センサを水平移動させながら対象物までの上下方向における距離を測定し、測定結果に基づいて少なくとも前記ワーク群の外側面のうち、直交する2つの外側面の位置を検出し、検出した2つの外側面の位置に基づいて前記基準点の水平方向における位置を補正するワーク搬送装置。
続きを表示(約 1,800 文字)
【請求項2】
前記演算処理装置は、前記測距センサを予め決められた第1方向に沿って水平移動させた後、前記第1方向とは直交する第2方向に水平移動させる請求項1に記載のワーク搬送装置。
【請求項3】
前記パレットは、長方形状とされており、
前記ワーク群を構成する各ワークは、前記パレットの直交する2辺の方向に沿って1列又は複数列に並べられて配置されており、
前記ワーク搬送装置に対して前記パレットが配置される位置は予め決められており、
前記演算処理装置は、前記デパレタイズを実施する前、前記ワーク搬送装置に対して位置決めされた前記パレットを構成する4辺のうちいずれか1辺と平行となる第1方向に沿って前記パレットの外側から内側に向かって前記測距センサを水平移動させながら距離を測定した後、前記第1方向とは直交する第2方向に沿って前記パレットの内側から外側に向かって前記測距センサを水平移動させながら距離を測定する請求項1に記載のワーク搬送装置。
【請求項4】
前記演算処理装置は、
前記第1方向に前記測距センサを水平移動させた際の測定結果から、前記ワーク群の外側面のうち前記第1方向に対して垂直となる第1外側面の前記第1方向における位置を検出し、前記第2方向に水平移動させた際の測定結果から、前記ワーク群の外側面のうち前記第1外側面に直交する第2外側面の前記第2方向における位置を検出し、
前記記憶部に記憶された前記第1方向における前記第1外側面の位置と、前記第1外側面の検出位置とを比較して、前記基準点の第1方向におけるずれを補正するとともに、前記記憶部に記憶された前記第2方向における前記第2外側面の位置と、前記第2外側面の検出位置とを比較して、前記基準点の第2方向におけるずれを補正する請求項3に記載のワーク搬送装置。
【請求項5】
水平方向における前記基準点の位置は、前記ワーク群の外側面のうち前記第1方向に対して垂直となる第1外側面と前記ワーク群の外側面のうち前記第1外側面に直交する第2外側面とが交わる箇所に一致するように予め決められており、
前記演算処理装置は、前記第1方向に前記測距センサを水平移動させる場合、前記第1方向における前記基準点の位置を通過するように移動させ、前記第2方向に前記測距センサを水平移動させる場合、前記第2方向における前記基準点の位置を通過するように移動させる、請求項3に記載のワーク搬送装置。
【請求項6】
前記演算処理装置は、
前記第1方向に前記測距センサを水平移動させた際の測定結果から、前記第1外側面の前記第1方向における位置を検出し、前記第2方向に水平移動させた際の測定結果から、前記第2外側面の前記第2方向における位置を検出し、
第1方向において、前記基準点から前記第1外側面の検出位置までの距離を、前記基準点の第1方向におけるずれとして特定するとともに、第2方向において、前記基準点から前記第2外側面の検出位置までの距離を、前記基準点の第2方向におけるずれとして特定して、前記基準点のずれを補正する請求項5に記載のワーク搬送装置。
【請求項7】
前記演算処理装置は、前記デパレタイズを実施する前、前記測距センサから前記パレットまでの距離を測定し、測定結果に基づいて前記基準点の上下方向における位置を補正する請求項1~6のうちいずれか1項に記載のワーク搬送装置。
【請求項8】
前記測距センサは、前記チャック部に取り付けられ、
前記演算処理装置は、前記移動部を制御して前記パレット上に積載されたワークの上方において前記チャック部を水平移動させることにより、前記測距センサを水平移動させる請求項1~6のうちいずれか1項に記載のワーク搬送装置。
【請求項9】
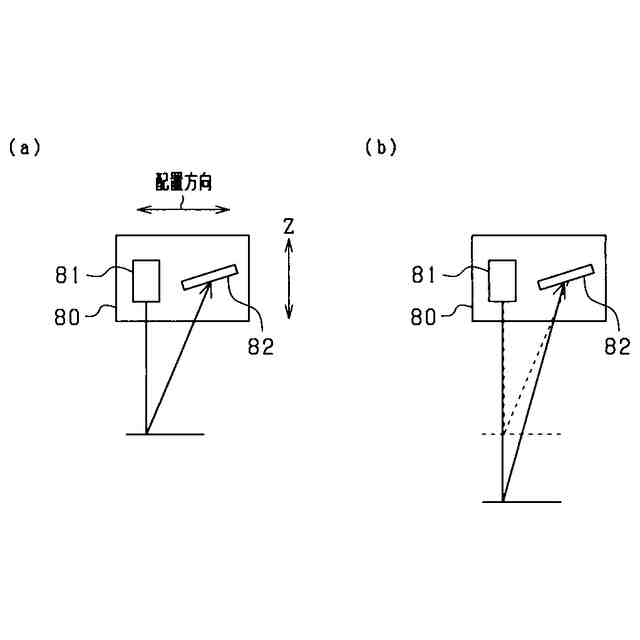
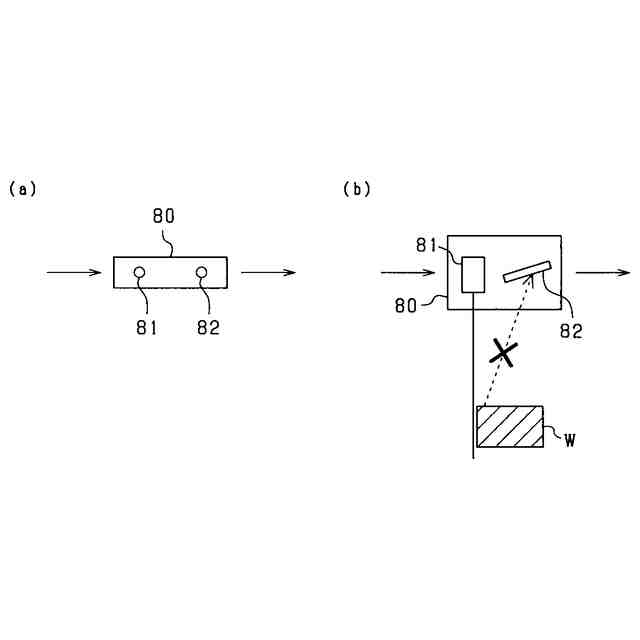
前記測距センサは、レーザ光を照射する発光部と、ワークから反射したレーザ光を受光する受光部を備えるレーザセンサであり、
前記発光部と、前記受光部とは、所定の配置方向に並べて配置されており、
前記演算処理装置は、前記ワークを走査する際、前記発光部及び前記受光部の配置方向に対して直交する方向に前記レーザセンサを移動させる請求項1~6のうちいずれか1項に記載のワーク搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークを搬送するワーク搬送装置に関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、ワークの輸送のためにパレットからワークを積み下ろすデパレタイズを実施するワーク搬送装置が知られている(例えば、特許文献1)。特許文献1に記載されているワーク搬送装置は、まず、カメラにてパレットに積載されたワークを撮像し、ワークの撮像画像をパターンマッチング等の画像処理を行うことにより、ワークの重心座標データを算出する。そして、ワーク搬送装置は、算出されたワークの重心座標データに基づいて物品をデパレタイズする。これにより、特許文献1に記載されているワーク搬送装置は、ワークがパレット上のどの位置に配置されているか不明でも、自動でデパレタイズを実施することができる。
【先行技術文献】
【特許文献】
【0003】
特開2002-13913号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、画像処理を行う場合、画像処理の負荷が重く、また、画像処理のためのプログラムが複雑化しやすい。特に、ディープラーニング系AIを利用するとその傾向が強くなる。また、カメラについても、ある程度以上の解像度が要求される。したがって、特許文献1に示すようなカメラを利用したワークの位置検出を行う場合、ワーク搬送装置に使用されるマイコンやカメラ等の要求性能が高くなりやすく、高価となりやすいという課題がある。
【0005】
本発明は、上記事情に鑑みてなされたものであり、簡単な構成でワークの位置検出を行うことができるワーク搬送装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するワーク搬送装置は、複数のワークが一塊となってパレット上に載置されたワーク群をデパレタイズするワーク搬送装置であって、前記ワーク群を構成する各ワークは、パレタイズされる際に、直交する2方向に1列又は複数列に並べられ、かつ、前記パレット上において設定された基準点に対して各ワークの相対位置が予め決められるようになっており、前記ワークを把持するチャック部と、前記チャック部を移動させる移動部と、前記基準点に対して、前記パレタイズ時における各ワークの相対的な位置情報を記憶する記憶部と、前記デパレタイズを実施させる場合、前記記憶部に記憶された各ワークの前記位置情報に基づいて、前記移動部により前記チャック部を移動させた後、前記チャック部により前記ワークを把持させるように、前記チャック部及び前記移動部を制御する演算処理装置と、距離を測定する測距センサと、を備え、前記演算処理装置は、前記デパレタイズを実施する前、前記パレット上に載置された前記ワーク群の上方において、前記測距センサを水平移動させながら対象物までの上下方向における距離を測定し、測定結果に基づいて少なくとも前記ワーク群の外側面のうち、直交する2つの外側面の位置を検出し、検出した2つの外側面の位置に基づいて前記基準点の水平方向における位置を補正する。
【0007】
上記構成では、デパレタイズを実施する前、パレット上に載置されたワーク群の上方において、測距センサを水平移動させながら対象物までの距離を測定し、測定結果に基づいてワーク群の外側面のうち、直交する2つの外側面の位置を検出し、検出した2つの外側面の位置に基づいて基準点の位置を補正する。これにより、パレット上に配置されたワーク群の位置がずれたとしても、簡単な処理で基準点の補正を行うことができる。
【0008】
したがって、デパレタイズを行う際、記憶部に記憶された、基準点に対する各ワークの相対的な位置情報に基づいて、移動部によりチャック部を移動させた場合であっても、水平方向の基準点のずれが補正されているため、適切な位置にチャック部を移動させることができる。
【図面の簡単な説明】
【0009】
デパレタイズ装置の斜視図。
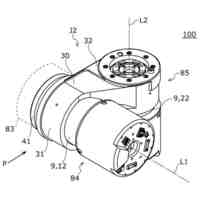
(a)は、チャックの斜視図、(b)はチャックの側面図。
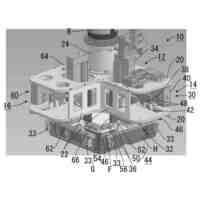
パレットに積載されたワークの斜視図。
レーザセンサの模式図。
補正処理のフローチャート。
レーザセンサの移動軌跡を示す平面図。
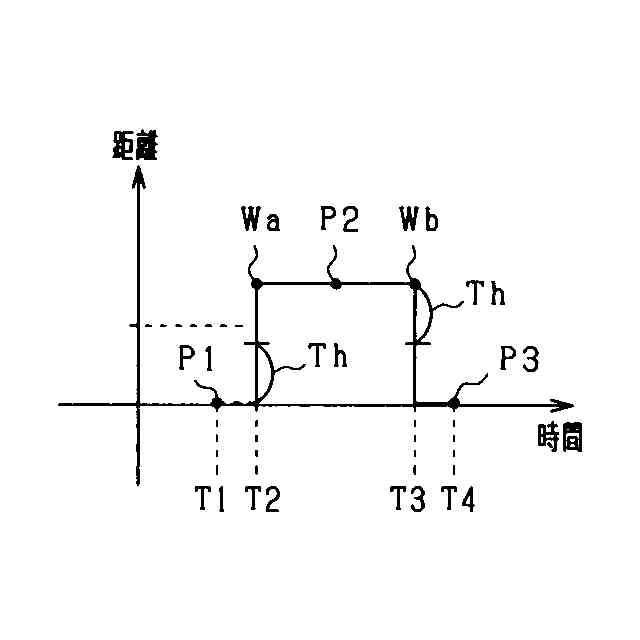
レーザセンサの測定結果を示す図。
比較例のレーザセンサの模式図。
【発明を実施するための形態】
【0010】
以下、本発明にかかる「ワーク搬送装置」を具体化した実施形態について、図面を参照しつつ説明する。なお、以下の実施形態及び変形例相互において、互いに同一もしくは均等である部分には、図中、同一符号を付しており、同一符号の部分についてはその説明を援用する。また、実施形態及び変形例の説明において、明示している構成の組み合わせだけでなく、特に組み合わせに支障が生じなければ、実施形態及び変形例を組み合わせることも可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
23日前
株式会社クレスコ
補助吸着具
16日前
株式会社不二越
ロボット
8日前
株式会社不二越
ロボット
1か月前
株式会社不二越
ロボット操作装置
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
23日前
川崎重工業株式会社
ロボット
1か月前
株式会社デンソー
操縦桿
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
制動システム
8日前
住友重機械工業株式会社
ロボット
2日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社イノウ
給油口キャップ用開閉具
9日前
株式会社不二越
垂直多関節ロボット
9日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
アイホン株式会社
ネジ締めカウントシステム
10日前
芝浦機械株式会社
双腕ロボット
1日前
株式会社デンソーウェーブ
ロボット制御システム
29日前
パナソニック株式会社
工具
9日前
パナソニック株式会社
工具
9日前
アピュアン株式会社
エアー式衝撃工具
26日前
住友重機械工業株式会社
ロボット及びカバー
2日前
学校法人法政大学
装着型アシスト装置
1か月前
株式会社マキタ
作業機
1か月前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
10日前
住友重機械工業株式会社
アクチュエータ支持部材
1日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
2日前
株式会社マキタ
インパクト工具
24日前
株式会社マキタ
インパクト工具
24日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
中国電力株式会社
電動ドライバー
1か月前
SB C&S株式会社
治具セット
23日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ