TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025027240
公報種別
公開特許公報(A)
公開日
2025-02-27
出願番号
2023131879
出願日
2023-08-14
発明の名称
把持装置、把持方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
15/06 20060101AFI20250219BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】様々な形状の磁性体のワークを安定して把持する。
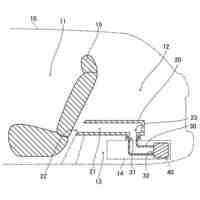
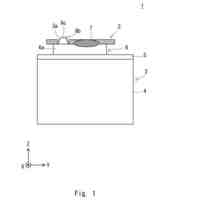
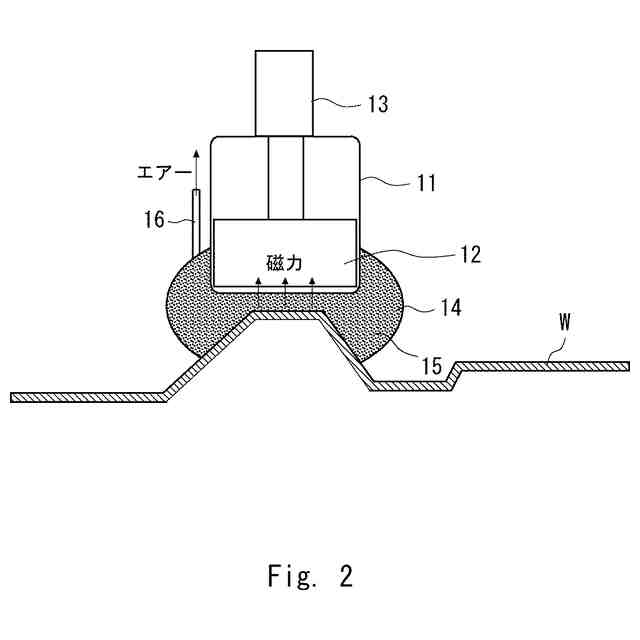
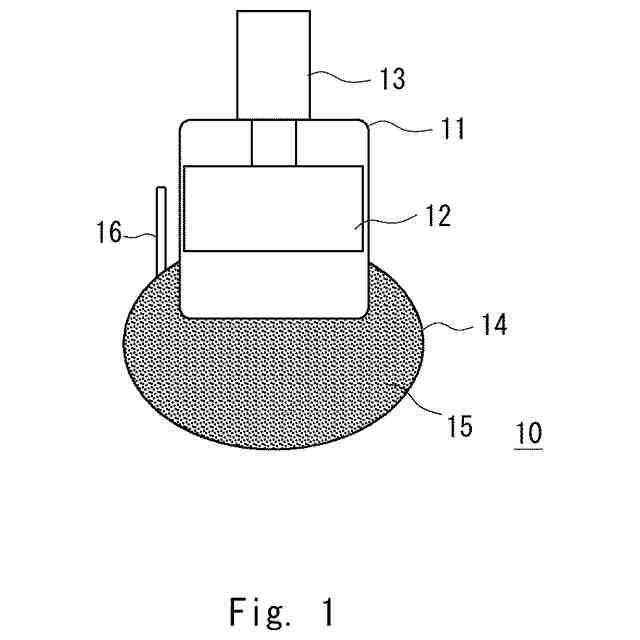
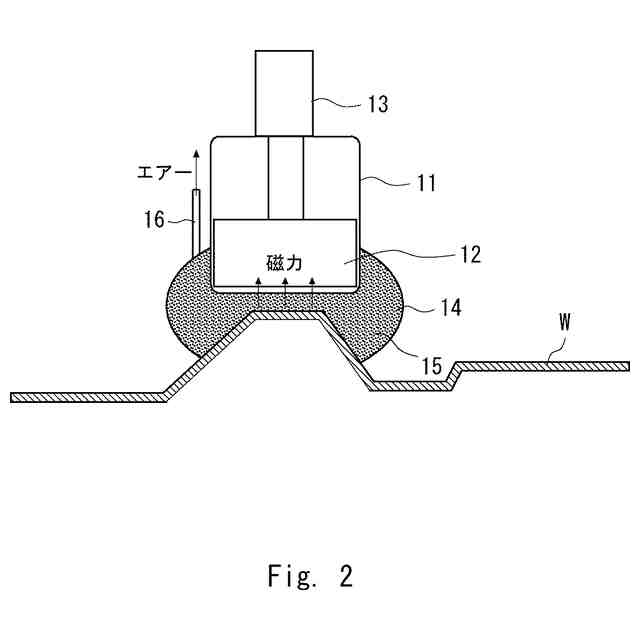
【解決手段】実施形態に係る把持装置10は、磁性体であるワークWに接触する、粉粒体15を収容する可撓性及び気密性を有する袋体14と、袋体14からの気体の排出又は袋体14への気体の供給を行うことにより、袋体14がワークWに接触したときに、袋体14をワークWの形状に倣って変形させる吸排気部16と、袋体14をワークWの形状に倣って変形させた状態で、ワークWに磁力を作用させてワークWを把持する磁石12とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
磁性体であるワークに接触する、粉粒体を収容する可撓性及び気密性を有する袋体と、
前記袋体からの気体の排出又は前記袋体への気体の供給を行うことにより、前記袋体が前記ワークに接触したときに、前記袋体を前記ワークの形状に倣って変形させる吸排気部と、
前記袋体を前記ワークの形状に倣って変形させた状態で、前記ワークに磁力を作用させて前記ワークを把持する磁気吸着部と、
を備える把持装置。
続きを表示(約 610 文字)
【請求項2】
前記粉粒体は磁性粉であり、
前記磁気吸着部は前記粉粒体を介して前記ワークに磁力を作用させる、
請求項1に記載の把持装置。
【請求項3】
前記磁気吸着部は、前記袋体を前記ワークの形状に倣って変形させた後に、前記ワークに磁力を作用させる、
請求項1に記載の把持装置。
【請求項4】
前記磁気吸着部は、前記ワークを磁力により把持する把持状態と、把持を解除した解除状態とを切り替え可能である、
請求項1に記載の把持装置。
【請求項5】
前記磁気吸着部は、
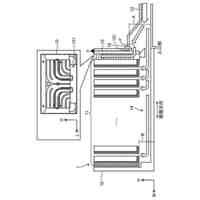
ハウジング内に設けられた磁石と、
ハウジング内において、前記磁石を前記ワークに近づけることにより前記把持状態とし、前記磁石を前記ワークから遠ざけることにより前記解除状態とする切替部と、
を含む、
請求項4に記載の把持装置。
【請求項6】
磁性体であるワークに接触する、粉粒体を収容する可撓性及び気密性を有する袋体からの気体の排出又は前記袋体への気体の供給を行うことにより、前記袋体が前記ワークに接触したときに、前記袋体を前記ワークの形状に倣って変形させるステップと、
前記袋体を前記ワークの形状に倣って変形させた状態で、前記ワークに磁力を作用させて前記ワークを把持するステップと、
を含む、把持方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持装置及び把持方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
産業用ロボットのエンドエフェクタとして、グリッパと呼ばれる、物体の把持に使用される把持装置がある。特許文献1には、磁性体であるワークを磁力により保持するマグネットグリッパが開示されている。特許文献1のマグネットグリッパは、永久磁石式のマグネットグリッパであり、磁力によりワークを保持する保持状態と、保持を解除した解除状態とを切り替えることができる。
【0003】
特許文献1では、下方が開口した非磁性材のハウジング内に、着磁面を下に向けて上下方向に移動可能に永久磁石が配置されている。ハウジングの開口部は傾斜状に形成されている。このマグネットグリッパは、永久磁石の着磁面の全体がハウジングの開口部から突出することで保持状態となり、着磁面の少なくとも一部分がハウジングの内部に没入して解除状態となる。
また、特許文献2には、支持面に置かれた対象物に袋体を押しつけて把持する把持装置が開示されている。特許文献2では、変形自在な袋体を対象物に押しつけた状態で、袋体の内部に粉粒体を導入することにより、袋体を膨張させて、袋体と対象物との隙間を減らし、袋体の内部における粉粒体と気体のうち、気体のみを、吸引して袋体の外部へ排出する。これにより、袋体の内部の粉粒体同士の摩擦力を増やし袋体の形状が保たれるようにしている。
【先行技術文献】
【特許文献】
【0004】
特開2019-155534号公報
特開2013-220492号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、永久磁石の下向きの着磁面がワークを把持する把持面となる。ワークの形状と把持面の形状とがうまく合わない場合、グリッパがワークを把持することができない場合がある。特に、把持面とワークとの間に回転が発生する場合には、グリッパによるワークの把持はより困難となる。
【0006】
把持対象の形状や姿勢に応じてグリッパを交換する場合、適切なグリッパの選定作業や交換作業が発生する。また、選定されたグリッパによる把持対象の把持計画や、把持開始から完了までのワークの姿勢の推定等には、複雑な演算が必要となる。このようなグリッパを備える産業用ロボットは、例えば、機械学習等を行って動作することも想定される。このようなグリッパの交換に関する作業は、ロボットによる把持作業の効率低下を招く恐れがある。また、特許文献2では、対象物を把持できる程度に、袋体と対象物との隙間を減らす必要があり、対象物が限定されるという問題がある。
【0007】
本発明は、このような問題に鑑みてなされたものであり、本発明の目的は、様々な形状の磁性体のワークを安定して把持することである。
【課題を解決するための手段】
【0008】
本発明の一態様に係る把持装置は、磁性体であるワークに接触する、粉粒体を収容する可撓性及び気密性を有する袋体と、前記袋体からの気体の排出又は前記袋体への気体の供給を行うことにより、前記袋体が前記ワークに接触したときに、前記袋体を前記ワークの形状に倣って変形させる吸排気部と、前記袋体を前記ワークの形状に倣って変形させた状態で、前記ワークに磁力を作用させて前記ワークを把持する磁気吸着部とを備えるものである。
【0009】
本発明の一態様に係る把持方法は、磁性体であるワークに接触する、粉粒体を収容する可撓性及び気密性を有する袋体からの気体の排出又は前記袋体への気体の供給を行うことにより、前記袋体が前記ワークに接触したときに、前記袋体を前記ワークの形状に倣って変形させるステップと、前記袋体を前記ワークの形状に倣って変形させた状態で、前記ワークに磁力を作用させて前記ワークを把持するステップとを含む。
【発明の効果】
【0010】
本発明によれば、様々な形状の磁性体のワークを安定して把持することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
組電池
今日
トヨタ自動車株式会社
自動車
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
電池パック
4日前
トヨタ自動車株式会社
全固体電池
4日前
トヨタ自動車株式会社
音声制御装置
4日前
トヨタ自動車株式会社
運行管理装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
充電制御装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
電池モジュール
4日前
トヨタ自動車株式会社
電池モジュール
4日前
トヨタ自動車株式会社
車両の制御装置
4日前
トヨタ自動車株式会社
資源の回収方法
4日前
トヨタ自動車株式会社
電池の検査方法
今日
トヨタ自動車株式会社
ラミネート電池
4日前
トヨタ自動車株式会社
モータの制御装置
4日前
トヨタ自動車株式会社
電池パック用ケース
4日前
トヨタ自動車株式会社
電動車両の制御装置
4日前
トヨタ自動車株式会社
ナビゲーション装置
今日
トヨタ自動車株式会社
車両のヒータ制御装置
4日前
トヨタ自動車株式会社
電池パックの製造方法
4日前
トヨタ自動車株式会社
車両用ブレーキシステム
4日前
トヨタ自動車株式会社
車椅子用リフト搭載車両
4日前
トヨタ自動車株式会社
車両のブレーキシステム
4日前
トヨタ自動車株式会社
撮像装置及びプログラム
4日前
トヨタ自動車株式会社
内燃機関の異常診断装置
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ