TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042339
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149288
出願日
2023-09-14
発明の名称
作業装置および作業プログラム
出願人
株式会社デンソー
代理人
弁理士法人サトー
主分類
B25J
19/06 20060101AFI20250319BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のロボットを協調動作させるとともに複数のロボット同士の干渉を抑制する。
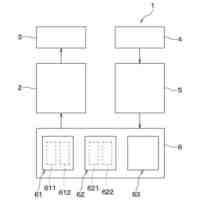
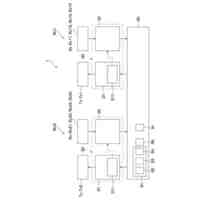
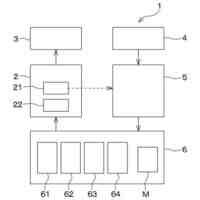
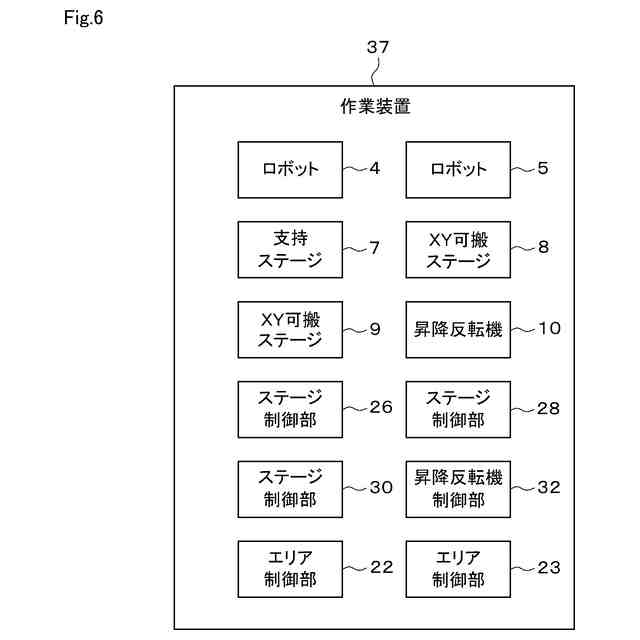
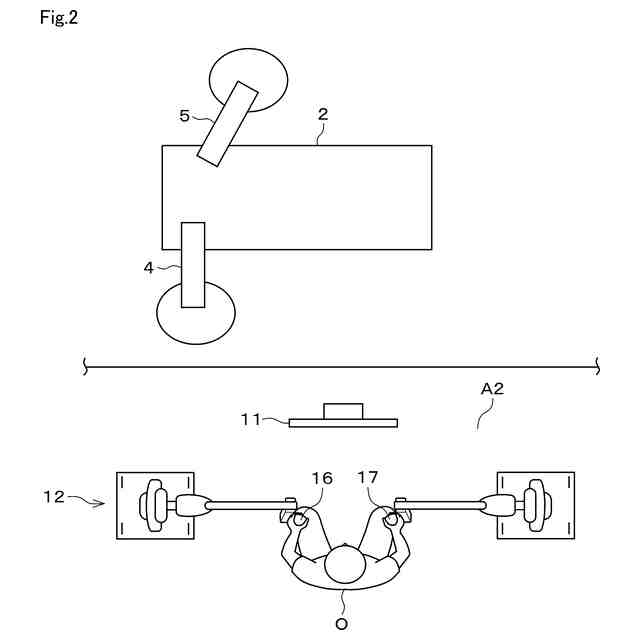
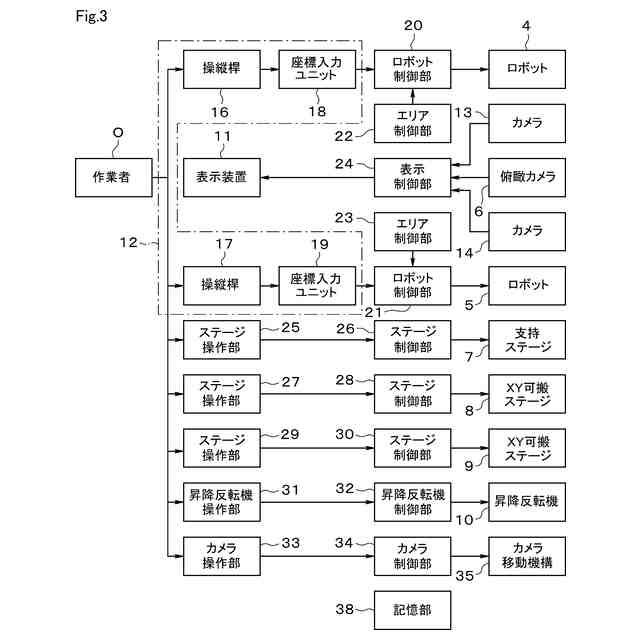
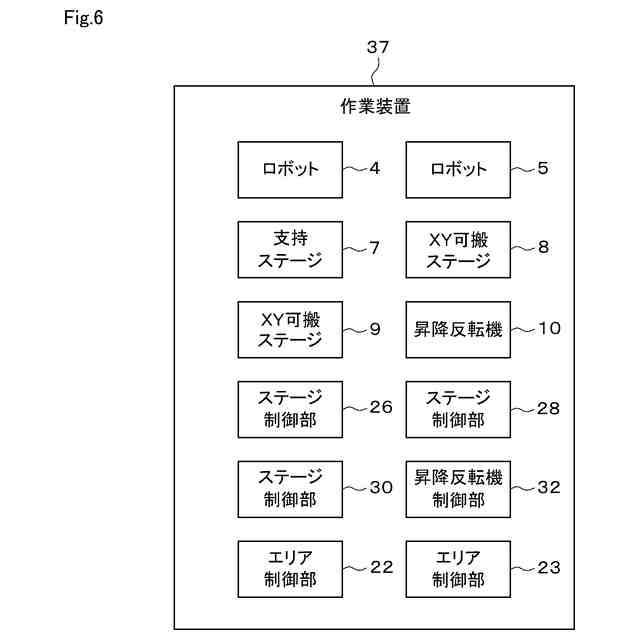
【解決手段】作業装置は、可動範囲の一部が重複する前記複数のロボット(4、5、81)と、前記対象物の少なくとも一部を動かすことができる対象物移動部(7、10)と、前記対象物移動部の動作を制御する移動制御部(26、28、30、32)と、前記複数のロボットのそれぞれについて、動作を許可する動作許可エリアを設定するエリア制御部(22、23)と、前記複数のロボットを前記動作許可エリア内で協調動作させる動作制御部(20、21)と、を備える。前記移動制御部は、前記動作許可エリア内で前記複数のロボットが協調動作される場合、前記対象物移動部の動作を制御して前記対象物を動かすことにより前記複数のロボットと前記対象物との相対位置を変化させる。
【選択図】図6
特許請求の範囲
【請求項1】
対象物(2)に対して所定の作業を行う作業装置であって、
可動範囲の一部が重複する前記複数のロボット(4、5、81)と、
前記対象物の少なくとも一部を動かすことができる対象物移動部(7、10)と、
前記対象物移動部の動作を制御する移動制御部(26、28、30、32)と、
前記複数のロボットのそれぞれについて、動作を許可する動作許可エリアを設定するエリア制御部(22、23)と、
前記複数のロボットを前記動作許可エリア内で協調動作させる動作制御部(20、21)と、
を備え、
前記移動制御部は、前記動作許可エリア内で前記複数のロボットが協調動作される場合、前記対象物移動部の動作を制御して前記対象物を動かすことにより前記複数のロボットと前記対象物との相対位置を変化させる作業装置。
続きを表示(約 1,500 文字)
【請求項2】
前記移動制御部は、前記対象物において前記作業が行われる場所である作業場所が前記複数のロボットのうちの1つに対応する前記動作許可エリアの外にある状態から前記動作許可エリアの内に含まれる状態へと遷移するように前記複数のロボットと前記対象物との相対位置を変化させる請求項1に記載の作業装置。
【請求項3】
前記複数のロボットを移動させることができるロボット移動部(8、9)を備え、
前記移動制御部は、前記対象物移動部の動作に加え、前記ロボット移動部の動作を制御し、
前記移動制御部は、前記動作許可エリア内で前記複数のロボットが協調動作される場合、前記ロボット移動部の動作を制御して前記複数のロボットのうち少なくとも1つを移動させることにより前記複数のロボットと前記対象物との相対位置を変化させる請求項1または2に記載の作業装置。
【請求項4】
前記エリア制御部は、
前記動作許可エリアを変化させることが可能であり、
前記動作許可エリア内で前記複数のロボットが協調動作される場合、前記複数のロボットのうち少なくとも1つに対応する前記動作許可エリアを変化させる請求項1または2に記載の作業装置。
【請求項5】
前記移動制御部および前記動作制御部は、前記対象物と前記複数のロボットのうち少なくとも1つとが同時に動かないように制御を行う請求項1または2に記載の作業装置。
【請求項6】
前記ロボットのアーム先端には、前記所定の作業を行うためのツール(T)が取り付けられるようになっており、
前記エリア制御部は、前記ツールの先端までの範囲を含めて前記動作許可エリアを設定する請求項1または2に記載の作業装置。
【請求項7】
前記ツールは、前記所定の作業として前記対象物の分解を行うためのものである請求項6に記載の作業装置。
【請求項8】
可動範囲の一部が重複する複数のロボット(4、5、81)を用いて対象物(2)に対して所定の作業を行うための作業プログラムであって、
プロセッサに、
前記複数のロボットのそれぞれについて、動作を許可する動作許可エリアを設定するエリア制御手順と、
前記複数のロボットを前記動作許可エリア内で協調動作させる動作制御手順と、
前記動作許可エリア内で前記複数のロボットが協調動作される場合、前記対象物の少なくとも一部を動かすことができる対象物移動部(7、10)の動作を制御して前記対象物を動かすことにより前記複数のロボットと前記対象物との相対位置を変化させる移動制御手順と、
を実行させる作業プログラム。
【請求項9】
前記移動制御手順では、前記対象物において前記作業が行われる場所である作業場所が前記複数のロボットのうちの1つに対応する前記動作許可エリアの外にある状態から前記動作許可エリアの内に含まれる状態へと遷移するように前記複数のロボットと前記対象物との相対位置を変化させる請求項8に記載の作業プログラム。
【請求項10】
前記移動制御手順では、
前記対象物移動部の動作に加え、前記複数のロボットを移動させることができるロボット移動部(8、9)の動作を制御し、
前記動作許可エリア内で前記複数のロボットが協調動作される場合、前記ロボット移動部の動作を制御して前記複数のロボットのうち少なくとも1つを移動させることにより前記複数のロボットと前記対象物との相対位置を変化させる請求項8または9に記載の作業プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物に対して所定の作業を行う作業装置および作業プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、人の負担軽減、きつい、汚い、危険という所謂3Kの回避などを目的として、ロボットを用いて対象物に対して例えば加工、分解などの作業を行うものがある。ただし、1つのロボットでは、非効率であったり、できない作業が存在する。そこで、このような課題を解決するため、特許文献1に開示されるように、複数のロボットを協調動作させることにより、例えば1つのロボットアームで対象物を掴んでもう1つのロボットアームで切るといった作業、2つのロボットアームのそれぞれで把持して持ち上げる作業などを行わせることが考えられる。以下、特許文献1に開示される技術のことを従来技術と称することとする。
【先行技術文献】
【特許文献】
【0003】
特開2013-094956号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記したように複数のロボットを協調動作させる場合、複数のロボットの可動域の少なくとも一部が重複することがあり、そのようなロボットを同時に操作すると、誤操作などに起因してロボット同士が干渉するといったリスクが生じる。このような干渉を避けるためには、各ロボットについて、動作を許可する動作許可エリアを設定することが考えられる。しかし、動作許可エリアの設定によっては、できない作業が発生する可能性がある。
【0005】
従来技術では、上記干渉を避けるため、2台のロボットの作業スペースの共通の領域を監視領域とし、1台のロボットだけが侵入するように監視する方法が採用されている。しかしながら、従来技術の方法では、監視領域にはロボットが1台しか入れないため、2台のロボットが対象物に対して時間差で作業するような場合は問題ないが、1つの対象物に対して2台のロボットが同時に加工などの作業を行うことができなくなる。
【0006】
また、従来技術では、2台のロボットを同時に操作する場合、その操作を行う作業者は、1台のロボットだけが監視領域に入るように制御を行う必要がある。しかし、このような制御を正確に行うためには熟練が必要となり、熟練度が低い作業者では咄嗟に間違うことがあり、そうすると、ロボット同士が干渉するおそれがある。
【0007】
本発明は上記事情に鑑みてなされたものであり、その目的は、複数のロボットを協調動作させるとともに複数のロボット同士の干渉を抑制することができる作業装置および作業プログラムを提供することにある。
【課題を解決するための手段】
【0008】
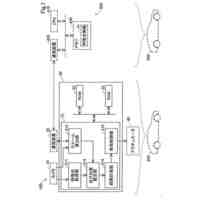
本開示の一態様による作業装置は、対象物(2)に対して所定の作業を行う作業装置であって、可動範囲の一部が重複する前記複数のロボット(4、5、81)と、前記対象物の少なくとも一部を動かすことができる対象物移動部(7、10)と、前記対象物移動部の動作を制御する移動制御部(26、28、30、32)と、前記複数のロボットのそれぞれについて、動作を許可する動作許可エリアを設定するエリア制御部(22、23)と、前記複数のロボットを前記動作許可エリア内で協調動作させる動作制御部(20、21)と、を備える。前記移動制御部は、前記動作許可エリア内で前記複数のロボットが協調動作される場合、前記対象物移動部の動作を制御して前記対象物を動かすことにより前記複数のロボットと前記対象物との相対位置を変化させる。
【0009】
本開示の一態様による作業プログラムは、可動範囲の一部が重複する複数のロボット(4、5、81)を用いて対象物(2)に対して所定の作業を行うためのものであって、プロセッサに、前記複数のロボットのそれぞれについて、動作を許可する動作許可エリアを設定するエリア制御手順と、前記複数のロボットを前記動作許可エリア内で協調動作させる動作制御手順と、前記動作許可エリア内で前記複数のロボットが協調動作される場合、前記対象物の少なくとも一部を動かすことができる対象物移動部(7、10)の動作を制御して前記対象物を動かすことにより前記複数のロボットと前記対象物との相対位置を変化させる移動制御手順と、を実行させる。
【0010】
これによれば、たとえ所定の作業を行うための領域が1つのロボットの動作許可エリアだけに含まれることになったとしても、複数のロボットと対象物との相対位置の変化により、所定の作業を行うための領域を複数のロボットの動作許可エリアに含ませることができる。このため、所定の作業に対する複数のロボットの協調動作を、複数のロボット同士の干渉が抑制された状態で行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
筐体
9日前
株式会社デンソー
モータ
22日前
株式会社デンソー
駆動装置
1日前
株式会社デンソー
回転電機
23日前
株式会社デンソー
診断装置
8日前
株式会社デンソー
演算装置
8日前
株式会社デンソー
試験装置
18日前
株式会社デンソー
電池装置
16日前
株式会社デンソー
慣性センサ
15日前
株式会社デンソー
半導体装置
8日前
株式会社デンソー
レーダ装置
9日前
株式会社デンソー
レーダ装置
22日前
株式会社デンソー
レーダ装置
9日前
株式会社デンソー
レーダ装置
15日前
株式会社デンソー
レーダ装置
16日前
株式会社デンソー
レーダ装置
16日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
半導体装置
18日前
株式会社デンソーウェーブ
タグ通信装置
8日前
株式会社デンソーウェーブ
タグ通信装置
23日前
株式会社デンソー
通信システム
23日前
株式会社デンソー
通信システム
23日前
株式会社デンソー
通信システム
24日前
株式会社デンソー
電力変換装置
1日前
株式会社デンソー
熱交換システム
4日前
株式会社デンソー
車載用冷凍装置
2日前
株式会社デンソー
自己位置推定装置
25日前
株式会社デンソー
スイッチング素子
今日
株式会社デンソーテン
スロットアンテナ
17日前
株式会社デンソーウェーブ
ロボットシステム
24日前
株式会社デンソー
回転角度検出装置
16日前
株式会社デンソー
路面摩擦推定装置
23日前
株式会社デンソーウェーブ
光学情報読取装置
8日前
株式会社デンソー
二酸化炭素回収装置
17日前
株式会社デンソーウェーブ
歪ゲージの取付方法
23日前
株式会社デンソーウェーブ
移動体追跡システム
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ