TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035774
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2023143024
出願日
2023-09-04
発明の名称
通信端末装置及びロボット制御システム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
13/02 20060101AFI20250307BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】操作資格のない作業者が産業機器の教示制御に関する操作を行ってしまうことを防ぐことができる通信端末装置を提供する。
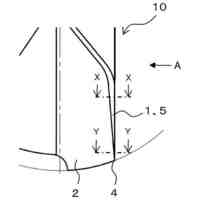
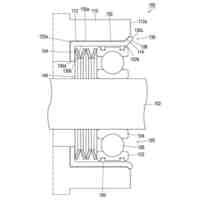
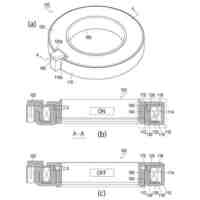
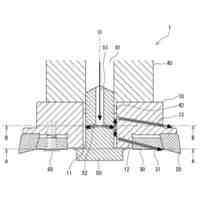
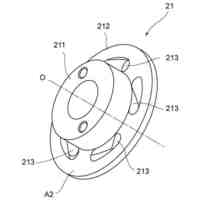
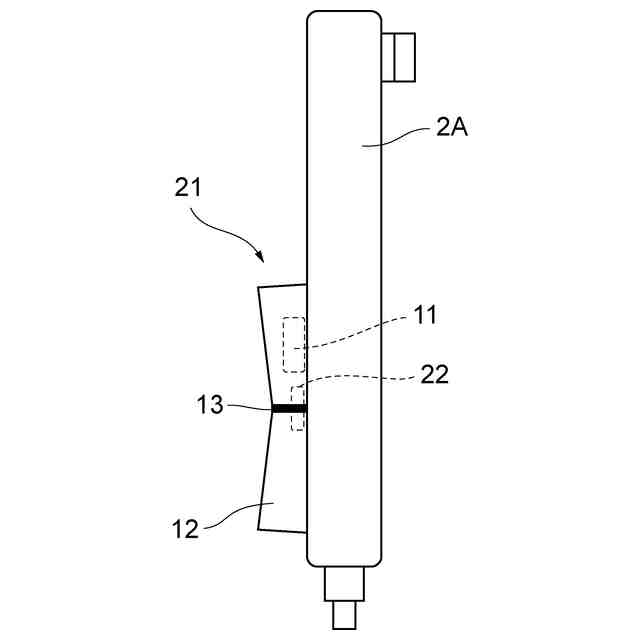
【解決手段】外部から押圧された状態においてオン状態となるスイッチ部11と、スイッチ部11の周囲に設けられ、作業者の手Hが接触すると作業者の生体情報を検出する生体センサ22と、スイッチ部11と生体センサ22とを被覆するとともに、作業者の手Hに握られることでスイッチ部11が押圧されるとともに生体センサ22が露出するように変形するカバー部12と、スイッチ部11がオン状態であり、かつ、生体センサ22により検出した生体情報が所定の作業者のものである場合に、教示制御に関する操作を受け付ける操作受付部41と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
産業機器の教示制御に関する操作を行う通信端末装置であって、
外部から押圧された状態においてオン状態となるスイッチ部と、
前記スイッチ部の周囲に設けられ、作業者の手が接触すると当該作業者の生体情報を検出する生体センサと、
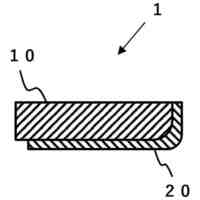
前記スイッチ部と前記生体センサとを被覆するとともに、前記作業者の手に握られることで前記スイッチ部が押圧されるとともに前記生体センサが露出するように変形するカバー部と、
前記スイッチ部がオン状態であり、かつ、前記生体センサにより検出した前記生体情報が所定の作業者のものである場合に、前記教示制御に関する操作を受け付ける操作受付部と、
を備えることを特徴とする通信端末装置。
続きを表示(約 1,000 文字)
【請求項2】
前記カバー部は、前記生体センサに対向する位置にスリットが形成され、前記手に握られた状態において前記スリットが開口するように変形することで、前記生体センサが露出されることを特徴とする請求項1に記載の通信端末装置。
【請求項3】
前記カバー部は、前記スリットが形成された部分が最も薄く、当該スリットから離れるにつれて厚くなっていく形状であることを特徴とする請求項2に記載の通信端末装置。
【請求項4】
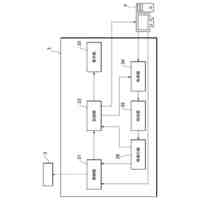
前記請求項1に記載の前記通信端末装置と、
前記通信端末装置から出力された教示データに基づき、ロボット本体の動作を制御するロボット制御装置と、
を具備し、
前記通信端末装置は、
前記スイッチ部のオンオフ状態の情報、及び、前記生体センサにより検出した前記生体情報を出力する生体情報出力部を更に備え、
前記ロボット制御装置は、
前記生体情報出力部が出力した各情報が入力される生体情報入力部と、
前記生体情報入力部に前記スイッチ部がオン状態の情報、及び、前記生体情報が入力された場合、前記入力部に入力された前記生体情報が前記所定の作業者のものであるか否かを判定する判定部と、
前記判定部の判定結果が肯定判定である場合、前記操作受付部が前記教示制御に関する操作を受け付けることを許可し、それ以外の場合、前記操作受付部が前記教示制御に関する操作を受け付けることを非許可とする許可部と、
を有することを特徴とするロボット制御システム。
【請求項5】
前記判定部は、前記判定結果が肯定判定である場合、前記所定の作業者を特定し、
前記許可部は、前記判定部によって特定した前記作業者に応じて、許可する操作範囲を限定し、
前記操作受付部は、前記許可部によって限定された前記操作範囲において前記教示制御に関する操作を受け付けることを特徴とする請求項4に記載のロボット制御システム。
【請求項6】
前記判定部は、前記スイッチ部がオン状態との情報、又は、前記生体情報が前記入力部に入力されなくなる度に判定結果をリセットし、
前記許可部は、前記判定結果がリセットされると、次に前記判定部が肯定判定するまで、前記操作受付部が前記操作を受け付けることを非許可とすることを特徴とする請求項4に記載のロボット制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、通信端末装置及びロボット制御システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
産業機器、例えば産業用ロボットの教示制御に関する操作は、当該操作に関する特別教育を修了し、操作資格を得た作業者しか行うことができない。
【0003】
操作資格を有する作業者のみが上記操作を行うために、下記特許文献1及び下記特許文献2には、上記操作を行うにあたり、パスワード、二次元コード、生体情報などの認証を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2001-287180号公報
特開2021-089575号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、パスワードや二次元コードを用いる場合、他者に漏洩したり、チーム内で一つのパスワードや二次元コードを使い回したりする可能性が生じるため、操作資格のない作業者が上記操作を行ってしまうことを十分に防ぐことができない。
【0006】
また、生体情報を用いる場合、例えばスポット溶接の現場など、汚れが発生しやすい場所では、生体情報を読み取る生体センサに汚れが付着し、作業者を正しく識別することができない可能性がある。さらには、操作資格を有する作業者が最初に生体情報の認証を行い、その後、別の作業者に入れ替わって上記操作を行うことができてしまう。したがって、やはり操作資格のない作業者が上記操作を行ってしまうことを十分に防ぐことができない。
【0007】
上記課題に鑑み、本発明に係る通信端末装置及びロボット制御システムは、操作資格のない作業者が産業機器の教示制御に関する操作を行ってしまうことを防ぐことを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る通信端末装置は、産業機器の教示制御に関する操作を行う通信端末装置であって、外部から押圧された状態においてオン状態となるスイッチ部と、前記スイッチ部の周囲に設けられ、作業者の手が接触すると当該作業者の生体情報を検出する生体センサと、前記スイッチ部と前記生体センサとを被覆するとともに、前記作業者の手に握られることで前記スイッチ部が押圧されるとともに前記生体センサが露出するように変形するカバー部と、前記スイッチ部がオン状態であり、かつ、前記生体センサにより検出した前記生体情報が所定の作業者のものである場合に、前記教示制御に関する操作を受け付ける操作受付部と、を備える。
【0009】
また、前記カバー部は、前記生体センサに対向する位置にスリットが形成され、前記手に握られた状態において前記スリットが開口するように変形することで、前記生体センサが露出される。
【0010】
また、前記カバー部は、前記スリットが形成された部分が最も薄く、当該スリットから離れるにつれて厚くなっていく形状である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
25日前
株式会社不二越
ロボット
7日前
株式会社不二越
射出成形機
1か月前
株式会社不二越
金属製保持器
29日前
株式会社不二越
金属製保持器
29日前
株式会社不二越
電磁弁制御装置
11日前
株式会社不二越
超硬合金製ドリル
7日前
株式会社不二越
管用テーパタップ
1か月前
株式会社不二越
圧力制御システム
7日前
株式会社不二越
電食防止軸受構造
1か月前
株式会社不二越
スカイビングカッタ
24日前
株式会社不二越
垂直多関節ロボット
8日前
株式会社不二越
通り穴加工用タップ
15日前
株式会社不二越
クラッチアクチュエータ
今日
株式会社不二越
組立式スカイビングカッタ
1か月前
株式会社不二越
ブレーキ機構及び回転システム
29日前
株式会社不二越
ロボットの教示システム及び教示方法
29日前
株式会社不二越
二次電池用通電部品およびその製造方法
17日前
株式会社不二越
酸化皮膜形成用合金鋼、電食防止部品およびその製造方法
7日前
OMC株式会社
ロボット
22日前
株式会社クレスコ
補助吸着具
15日前
株式会社不二越
ロボット
7日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
22日前
工機ホールディングス株式会社
作業機
1か月前
株式会社イノウ
給油口キャップ用開閉具
8日前
川崎重工業株式会社
制動システム
7日前
住友重機械工業株式会社
ロボット
1日前
株式会社不二越
垂直多関節ロボット
8日前
芝浦機械株式会社
双腕ロボット
今日
アイホン株式会社
ネジ締めカウントシステム
9日前
パナソニック株式会社
工具
8日前
パナソニック株式会社
工具
8日前
株式会社デンソーウェーブ
ロボット制御システム
28日前
住友重機械工業株式会社
ロボット及びカバー
1日前
学校法人法政大学
装着型アシスト装置
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ