TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025056487
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023165991
出願日
2023-09-27
発明の名称
ロボットへの振動工具の取付装置
出願人
株式会社デンソーウェーブ
代理人
弁理士法人サトー
主分類
B25J
15/08 20060101AFI20250401BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットに伝わる振動を効果的に抑制することができるロボットへの振動工具の取付装置を提供する。
【解決手段】取付装置は、人の手で把持可能な持手部を有し動作時に振動が発生する振動工具をロボットの手先に取り付ける装置である。取付装置は、ロボットの手先に取付けられるベース部材と、ベース部材に取り付けられて持手部を保持可能な保持部材と、を備える。保持部材は、持手部の周囲に設けられた周囲部と、周囲部の内側に設けられて持手部に接触する部分を構成し、弾性変形可能な部材で構成されて、振動工具に発生する振動を吸収して振動がロボットへ伝達されることを抑制する防振部と、を有する。
【選択図】図3
特許請求の範囲
【請求項1】
人の手で把持可能な持手部を有し動作時に振動が発生する振動工具をロボットの手先に取り付ける取付装置であって、
前記ロボットの手先に取付けられるベース部材と、
前記ベース部材に取り付けられて、前記持手部を保持可能な保持部材と、を備え、
前記保持部材は、
前記持手部の周囲に設けられた周囲部と、
前記周囲部の内側に設けられて前記持手部に接触する部分を構成し、弾性変形可能な部材で構成されて、前記振動工具に発生する振動を吸収して前記振動が前記ロボットへ伝達されることを抑制する防振部と、を有する、
ロボットへの振動工具の取付装置。
続きを表示(約 250 文字)
【請求項2】
前記防振部は、前記持手部の外面の周方向の全域に亘って設けられている、
請求項1に記載の取付装置。
【請求項3】
前記防振部を前記周囲部に固定する固定部を更に備え、
前記防振部は、前記固定部よりも弾性変形し易く構成されている、
請求項1に記載のロボットへの振動工具の取付装置。
【請求項4】
前記防振部と前記固定部とは、ゴム材によって一体に構成されている、
請求項3に記載のロボットへの振動工具の取付装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、ロボットへの振動工具の取付装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、例えばロボットを用いて成形加工やバリ取りなどを行うため、ロボットの手先に例えばディスクグラインダなどのように使用時に大きな振動が発生する振動工具が取り付けられることがある。
【先行技術文献】
【特許文献】
【0003】
特開平3-104464号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このように振動を発生する振動工具をロボットの手先に直接取り付けると、振動工具の振動や反力がロボットに直接的に伝わってしまう。すると、ロボットに共振が発生することがあり、故障の原因となる。また、振動や反力によって加工対象に作用する力が一定に維持し難く、その結果、加工精度が落ちてしまうことがある。
【0005】
本発明は上記した事情に鑑みてなされたものであり、その目的は、ロボットに伝わる振動を効果的に抑制することができるロボットへの振動工具の取付装置を提供することにある。
【課題を解決するための手段】
【0006】
実施形態によるロボットへの振動工具の取付装置は、人の手で把持可能な持手部を有し動作時に振動が発生する振動工具をロボットの手先に取り付ける取付装置である。取付装置は、前記ロボットの手先に取付けられるベース部材と、前記ベース部材に取り付けられて、前記持手部を保持可能な保持部材と、を備える。前記保持部材は、前記持手部の周囲に設けられた周囲部と、前記周囲部の内側に設けられて前記持手部に接触する部分を構成し、弾性変形可能な部材で構成されて、前記振動工具に発生する振動を吸収して前記振動が前記ロボットへ伝達されることを抑制する防振部と、を有する。
【図面の簡単な説明】
【0007】
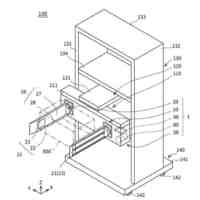
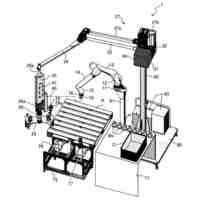
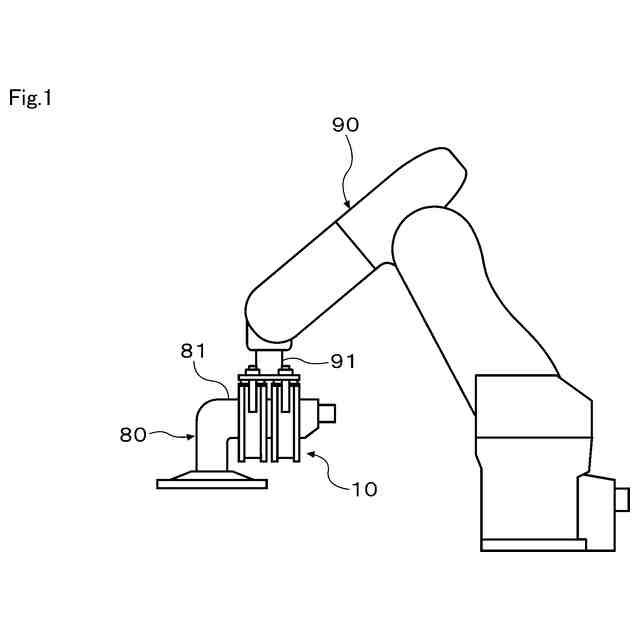
一実施形態による取付装置をロボットの手先に取り付けた例を示す図
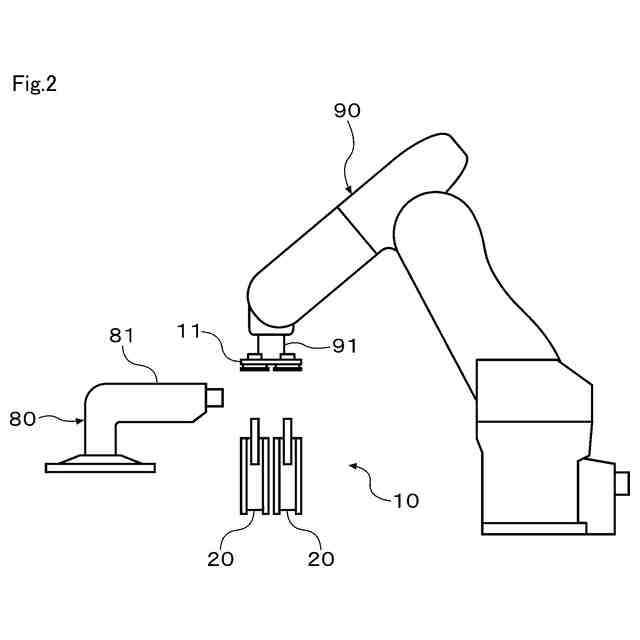
一実施形態による取付装置をロボットの手先から取り外した例を示す図
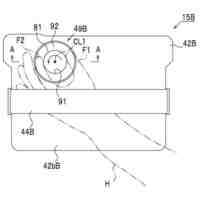
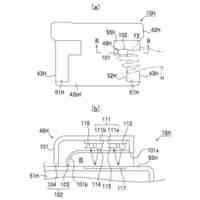
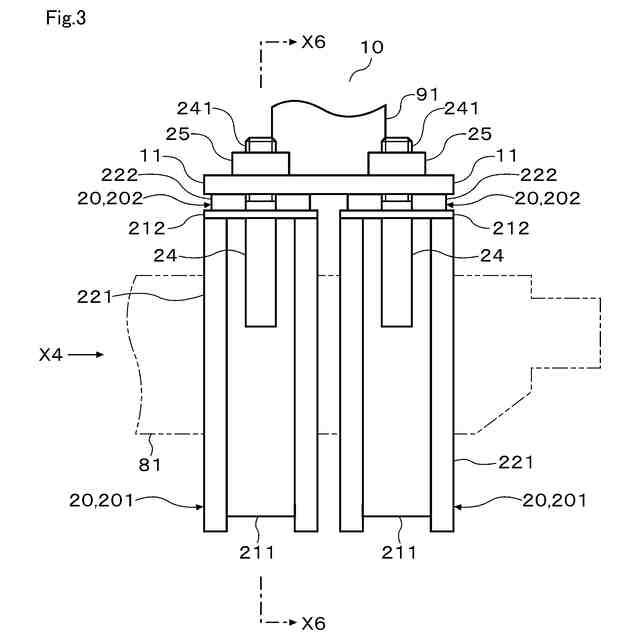
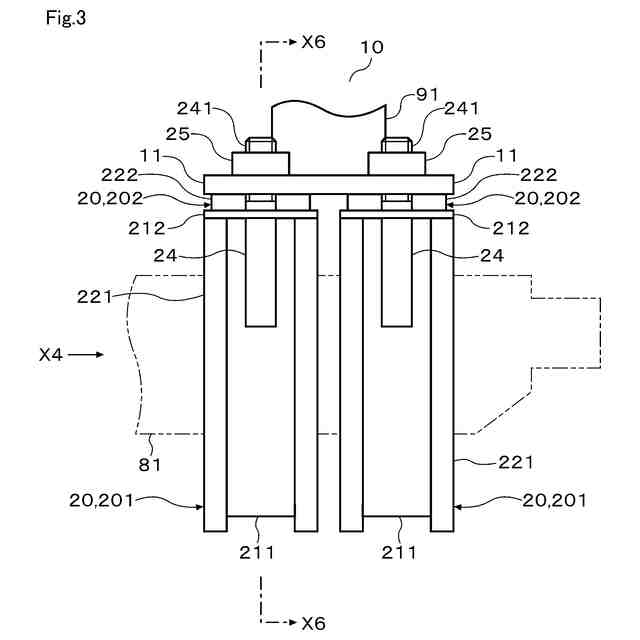
一実施形態による取付装置を示す図
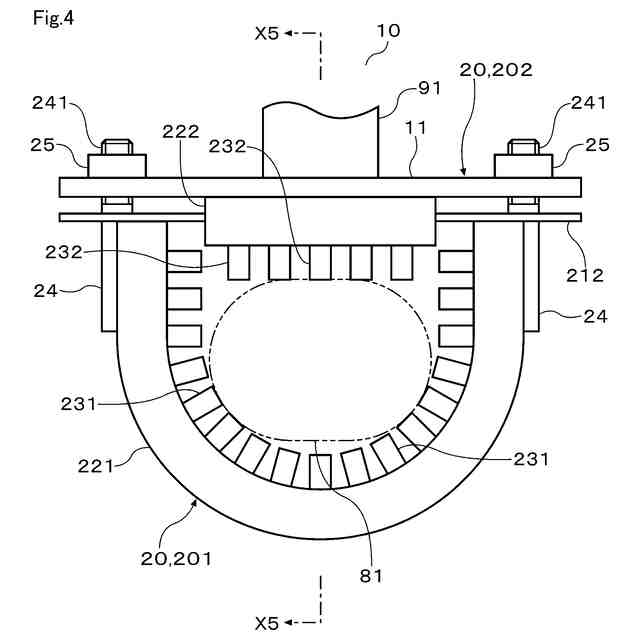
一実施形態による取付装置を図3の矢印X4方向から示す図
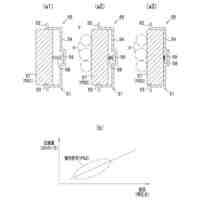
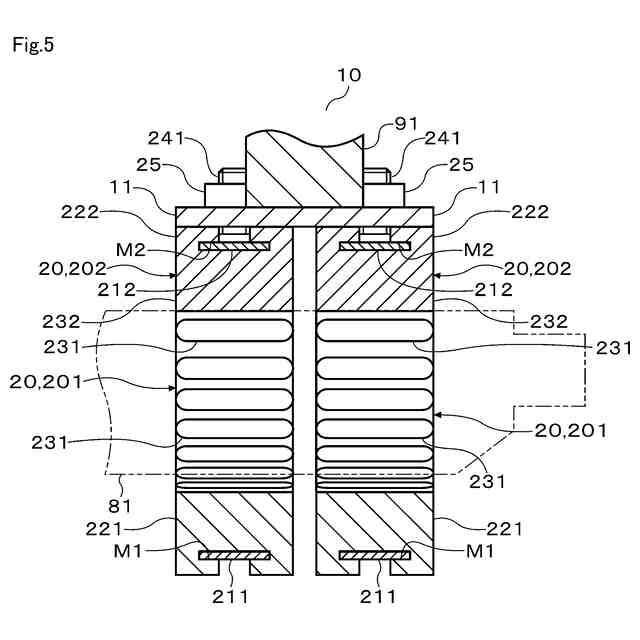
一実施形態による取付装置を図4の矢印X5-X5線に沿って示す断面図
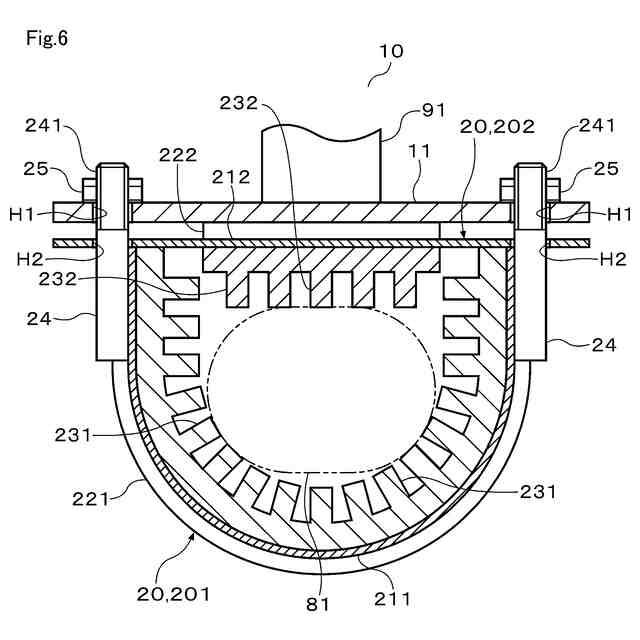
一実施形態による取付装置を図3の矢印X6-X6線に沿って示す断面図
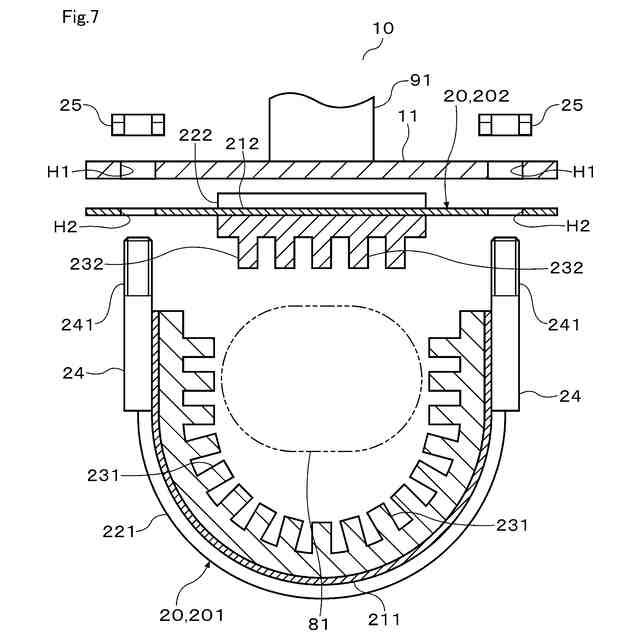
一実施形態による取付装置について、図6の状態から取り外された状態を示す図
【発明を実施するための形態】
【0008】
以下、ロボットへの振動工具の取付装置について、図面を参照しながら説明する。なお、以下の説明において、ロボットへの振動工具の取付装置を単に取付装置と称する。
【0009】
図1及び図2に示す取付装置10は、振動工具80をロボット90の手先に取り付けるための取付装置である。取付装置10は、例えばロボット90の手先91に取り付けられて、振動工具80を着脱可能に保持する機能を有する。ロボット90は、例えば多関節のロボットアームを有する垂直多関節のロボットで構成することができる。ロボット90は、例えば水平多関節型のロボットやパラレルリンク型のロボット、または直交型のロボット等であっても良い。
【0010】
振動工具80は、例えばディスクグラインダやインパクトドライバ、ハンマードリルなどのように使用時に大きな振動が発生する工具を想定している。振動工具80は、人が手に持って使うことを前提としたものを採用することができる。この場合、振動工具80は、例えば持手部81を備えている。作業者は、持手部81を手で持って扱うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
18日前
株式会社クレスコ
補助吸着具
11日前
株式会社不二越
ロボット
3日前
株式会社エビス
腰ベルト用連結具
18日前
個人
深孔スリーブ駆動ロッド構造
1か月前
工機ホールディングス株式会社
作業機
26日前
個人
バール
1か月前
川崎重工業株式会社
制動システム
3日前
株式会社イノウ
給油口キャップ用開閉具
4日前
株式会社不二越
垂直多関節ロボット
4日前
アイホン株式会社
ネジ締めカウントシステム
5日前
株式会社デンソーウェーブ
ロボット制御システム
24日前
パナソニック株式会社
工具
4日前
パナソニック株式会社
工具
4日前
アピュアン株式会社
エアー式衝撃工具
21日前
学校法人法政大学
装着型アシスト装置
28日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
5日前
株式会社マキタ
インパクト工具
19日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
19日前
株式会社不二越
ロボットの教示システム及び教示方法
25日前
SB C&S株式会社
治具セット
18日前
中国電力株式会社
電動ドライバー
25日前
JUKI株式会社
ハンドリング装置
1か月前
オムロン株式会社
モバイルロボット
25日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
21日前
オムロン株式会社
モバイルロボット
25日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
25日前
シナノケンシ株式会社
把持装置
25日前
株式会社星野商店
塗装ロボット用保護カバー
4日前
トーヨーコーケン株式会社
ワーク搬送システム
25日前
東京ロボティクス株式会社
物体操作方法、ロボット及びプログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ