TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025050367
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023159121
出願日
2023-09-22
発明の名称
物体操作方法、ロボット及びプログラム
出願人
東京ロボティクス株式会社
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20250327BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】基体から奥行方向等に離れた位置において物体操作を行う場合であっても、安定した物体操作を実現する。
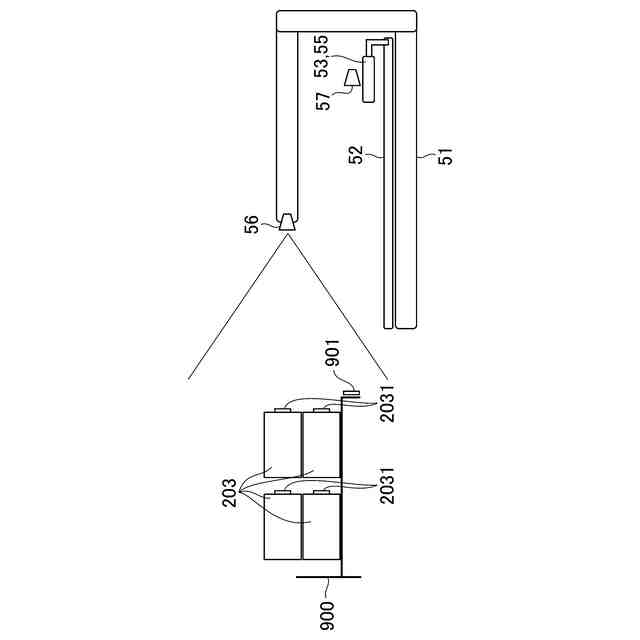
【解決手段】物体保持機構を変位させる変位機構を備えたロボットを用いた物体操作方法であって、前記物体保持機構により奥行方向において深い位置にある物体を保持する、物体保持ステップと、前記物体保持機構及び前記変位機構を用いて、保持した前記物体を奥行方向においてより浅い所定位置に載置する、載置ステップと、前記物体保持機構及び前記変位機構を用いて、載置された前記物体を操作する、物体操作ステップと、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
物体保持機構を変位させる変位機構を備えたロボットを用いた物体操作方法であって、
前記物体保持機構により奥行方向において深い位置にある物体を保持する、物体保持ステップと、
前記物体保持機構及び前記変位機構を用いて、保持した前記物体を奥行方向においてより浅い所定位置に載置する、載置ステップと、
前記物体保持機構及び前記変位機構を用いて、載置された前記物体を操作する、物体操作ステップと、
を備える、物体操作方法。
続きを表示(約 870 文字)
【請求項2】
前記載置ステップの後であって前記物体操作ステップより前に、前記物体に対する所定の認識処理を行う、認識ステップ、をさらに備える、請求項1に記載の物体操作方法。
【請求項3】
前記認識処理は、前記物体保持機構に備えられたカメラにて得られた画像情報に基づく認識処理である、請求項2に記載の物体操作方法。
【請求項4】
前記物体は、複数の物体が鉛直方向に積み上げられた物体群の最下段の物体である、請求項1に記載の物体操作方法。
【請求項5】
前記物体操作ステップにおいて、前記物体保持機構及び前記変位機構は、前記物体群のうち上段の物体から順に操作を行う、請求項4に記載の物体操作方法。
【請求項6】
前記物体保持ステップは、さらに、保持した前記物体の一部が載置面と接触した状態を維持する程度に前記変位機構により前記物体を鉛直上方に持ち上げる、ステップを含む、請求項1に記載の物体操作方法。
【請求項7】
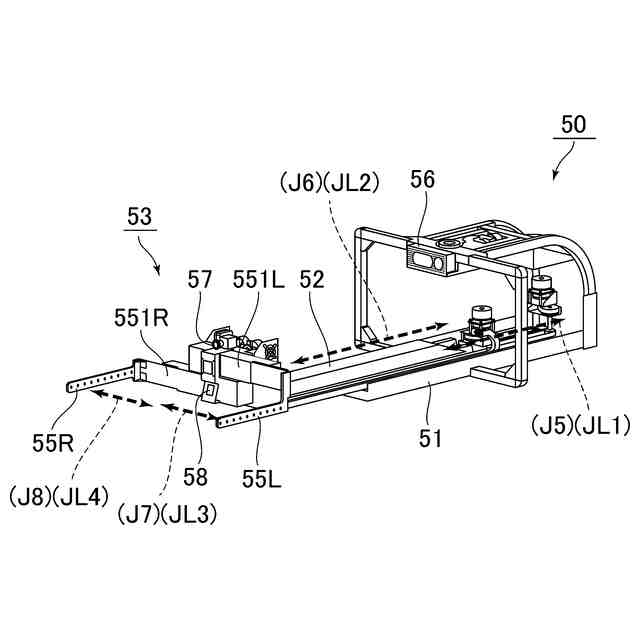
前記物体保持機構は、
基体と、
前記基体に対して第1の軸に沿って直動する、第1直動体と、
前記第1直動体に対して前記第1の軸と平行な第2の軸に沿って直動し、物体を操作するエンドエフェクタを備える、第2直動体と、を備え、
前記物体保持ステップにおいて、前記第1直動体は前記物体の載置面より高い位置に配置される、請求項1に記載の物体操作方法。
【請求項8】
前記物体操作ステップにおける物体の操作において、前記第1直動体は前記物体の載置面より高い位置に配置される、請求項7に記載の物体操作方法。
【請求項9】
前記物体操作ステップにおける前記物体の操作は、前記物体を前記ロボットの格納部へと格納する操作である、請求項1に記載の物体操作方法。
【請求項10】
前記変位機構は、多関節ロボットアームである、請求項1に記載の物体操作方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、物体操作方法、特に、モバイルマニピュレータ等に搭載可能な物体操作装置の行う物体操作方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、倉庫内の自動化にあたって搬送ロボット(又はモバイルマニピュレータ)が活用されている(例えば、特許文献1、2)。一例として、この種の搬送ロボットは、倉庫内において、棚板又は台等に載置された物体を取得し(ピッキング)、倉庫内を移動し、他の場所へと載置する(プレイシング)工程を行う。
【先行技術文献】
【特許文献】
【0003】
特開2015-178141号公報
特開2019-048375号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、従前のこの種の装置においては、基体から奥行方向等に離れた位置において物体操作を行うことが想定されていないか又はそれについて十分な検討がなされていなかった。そのため、従前の装置を用いて、棚板又は台上の奥行方向に深い位置において物体操作を行おうとすると、物体又はその周辺空間に関する認識精度が低下し、又は、物体に対するリーチング誤差が拡大すること等により、物体の操作精度が低下するおそれがあった。この結果、物体操作が不安定化するおそれがあった。
【0005】
本発明は上述の技術的背景に鑑みてなされたものであり、その目的は、基体から奥行方向等に離れた位置において物体操作を行う場合であっても、安定した物体操作を実現することにある。
【課題を解決するための手段】
【0006】
上述の技術的課題は、以下の構成を有する物体操作方法、ロボット、又はプログラム等により解決することができる。
【0007】
すなわち、本発明に係る物体操作方法は、物体保持機構を変位させる変位機構を備えたロボットを用いた物体操作方法であって、前記物体保持機構により奥行方向において深い位置にある物体を保持する、物体保持ステップと、前記物体保持機構及び前記変位機構を用いて、保持した前記物体を奥行方向においてより浅い所定位置に載置する、載置ステップと、前記物体保持機構及び前記変位機構を用いて、載置された前記物体を操作する、物体操作ステップと、を備えている。
【0008】
このような構成によれば、奥にある物体を一旦より浅い(手前側の)位置に移動させて載置した後、再度、当該物体を操作することとなる。これにより、再度の物体操作時の諸条件を一定とすることができるので、安定した物体操作を実現することができる。
【0009】
また、別の側面から見た本発明に係る物体操作方法は、物体保持機構を変位させる変位機構を備えたロボットを用いた物体操作方法であって、前記物体保持機構及び前記変位機構を用いて、前記物体保持機構に保持された物体を奥行方向において浅い位置に載置する、第1載置ステップと、前記物体保持機構を用いて、載置された前記物体を前記物体保持機構へと保持する、載置物体保持ステップと、前記物体保持機構及び前記変位機構を用いて、保持した前記物体を奥行方向においてより深い所定位置に載置する、第2載置ステップと、を備えている。
【0010】
このような構成によれば、保持している物体を一旦手前側の位置に載置した後、再度、奥行方向の深い位置に載置することとなる。これにより、置き直すにあたっての諸条件を一定とすることができるので、安定した物体操作(特に、物体の載置)を実現することができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
15日前
株式会社クレスコ
補助吸着具
8日前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
今日
株式会社不二越
ロボット
1か月前
個人
深孔スリーブ駆動ロッド構造
28日前
株式会社エビス
腰ベルト用連結具
15日前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
23日前
株式会社デンソー
操縦桿
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
個人
バール
28日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社イノウ
給油口キャップ用開閉具
1日前
川崎重工業株式会社
制動システム
今日
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
1日前
アイホン株式会社
ネジ締めカウントシステム
2日前
パナソニック株式会社
工具
1日前
パナソニック株式会社
工具
1日前
株式会社デンソーウェーブ
ロボット制御システム
21日前
株式会社マキタ
作業機
1か月前
アピュアン株式会社
エアー式衝撃工具
18日前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
学校法人法政大学
装着型アシスト装置
25日前
三菱電機株式会社
トルク締め個所検出システム
28日前
株式会社マキタ
打ち込み工具
2日前
株式会社マキタ
インパクト工具
16日前
高丸工業株式会社
ロボット操作システムの動作方法
28日前
株式会社マキタ
インパクト工具
16日前
株式会社不二越
ロボットの教示システム及び教示方法
22日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
中国電力株式会社
電動ドライバー
22日前
SB C&S株式会社
治具セット
15日前
株式会社デンソー
作業装置および作業プログラム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ


































