TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059536
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169680
出願日
2023-09-29
発明の名称
ロボット制御システム及び停電監視回路
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
19/06 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】停電が発生したことを速やかに検出可能とすることにより、電源モジュールのコスト低減や大型化の抑制に寄与すること。
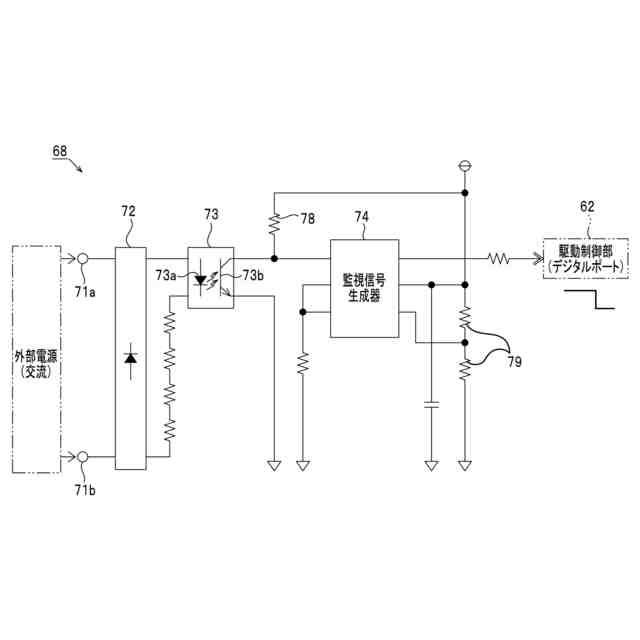
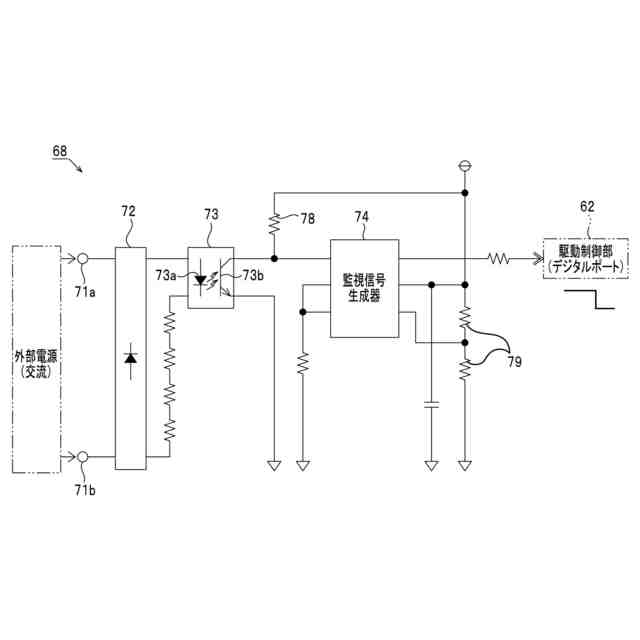
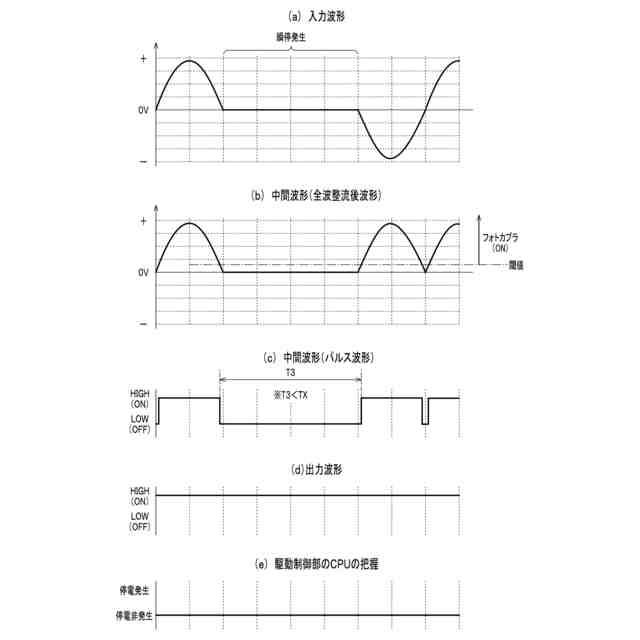
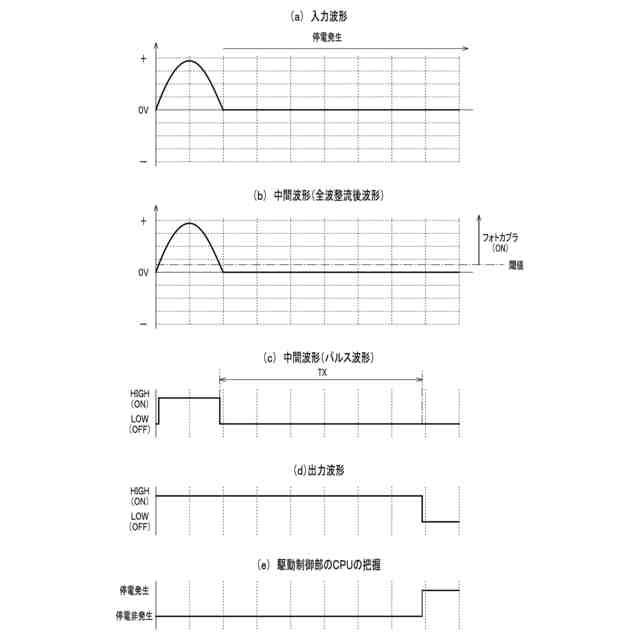
【解決手段】ロボットコントローラには、停電を監視する停電監視回路68が設けられている。停電監視回路68は、外部電源から当該停電監視回路68の入力端子71a,71bに供給された電力(交流)を整流する整流器72と、整流器72による整流後の電力を光に変換して一定周期となるパルス信号を生成するフォトカプラ73と、フォトカプラ73にて生成されたパルス信号に基づいて停電監視信号を生成する監視信号生成器74とを有している。監視信号生成器74は、パルス信号がLOWレベルとなっている時間が判定基準時間に達した場合に停電監視信号として停電発生を示す停電検出信号を駆動制御部62のデジタルポートへ出力する。駆動制御部62のCPUはこの停電検出信号を受信したことに基づいて停電対応処理を実行する。
【選択図】 図6
特許請求の範囲
【請求項1】
産業用ロボットを制御するロボット制御システムであって、
交流電源である外部電源から電力が供給される入力端子と、
前記入力端子への入力電圧が特定電圧を上回っている場合に第1の値となり、前記特定電圧を下回っている場合に第2の値となるパルス信号を生成するパルス信号生成部と、
前記パルス信号生成部にて生成された前記パルス信号の値が所定期間に亘って前記第2の値となっている場合に停電対応処理を実行する停電対応処理実行部と
を備えているロボット制御システム。
続きを表示(約 810 文字)
【請求項2】
前記パルス信号は、前記外部電源からの電力供給が続いている状況下においては前記第1の値と前記第2の値とに周期的に切り替わり、
前記パルス信号生成部は、前記第1の値となる期間が前記第2の値となる期間よりも長くなるようにして前記パルス信号を生成する請求項1に記載のロボット制御システム。
【請求項3】
前記パルス信号生成部へ入力される前に供給電力の電圧において負電圧となっている部分を正電圧に変換する変換部を備えている請求項1に記載のロボット制御システム。
【請求項4】
前記パルス信号が前記所定期間に亘って前記第1の値となった場合に停電検出信号を生成する停電検出信号生成部と、
前記産業用ロボットの駆動制御を行う制御部と
を備え、
前記制御部は、前記停電対応処理実行部を有してなり、
前記停電検出信号生成部にて生成された停電検出信号は、前記制御部のデジタルポートへ入力され、前記停電対応処理実行部は前記デジタルポートに入力された前記停電検出信号に基づいて前記停電対応処理を実行する請求項1乃至請求項3のいずれか1つに記載のロボット制御システム。
【請求項5】
産業用ロボットを制御するロボット制御システムに適用さる停電監視回路であって、
交流電源である外部電源から電力が供給される入力端子と、
前記入力端子への入力電圧が特定電圧を上回っている場合に第1の値となり、前記特定電圧を下回っている場合に第2の値となるパルス信号を生成するパルス信号生成部と、
前記パルス信号生成部にて生成された前記パルス信号の値が所定期間に亘って前記第2の値となっている場合に停電検出信号を生成し、前記ロボット制御システムにおける制御部へ当該停電検出信号を出力可能な停電検出信号生成部と
を備えている停電監視回路。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御システム及びロボット制御システムに適用される停電監視回路に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
産業用ロボットの駆動制御を行うロボット制御システムには、外部電源からの電力供給が突如として停止された場合、すなわち停電が発生した場合に備えて補助電源が搭載されているものがある。この種のロボット制御システムにおいては、停電が発生した場合には外部電源に代わって補助電源から電力が供給され、補助電源からの電力供給中にロボットを正常に停止させるための停止制御、ロボットの位置や制御プログラムの実行状況を保存する制御等を行うように構成されたものがある。例えば特許文献1に記載されたロボットコントローラにおいては、平滑コンデンサの充電電荷を電源とした動作期間中にロボットの停止制御を行う技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2012-213854号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
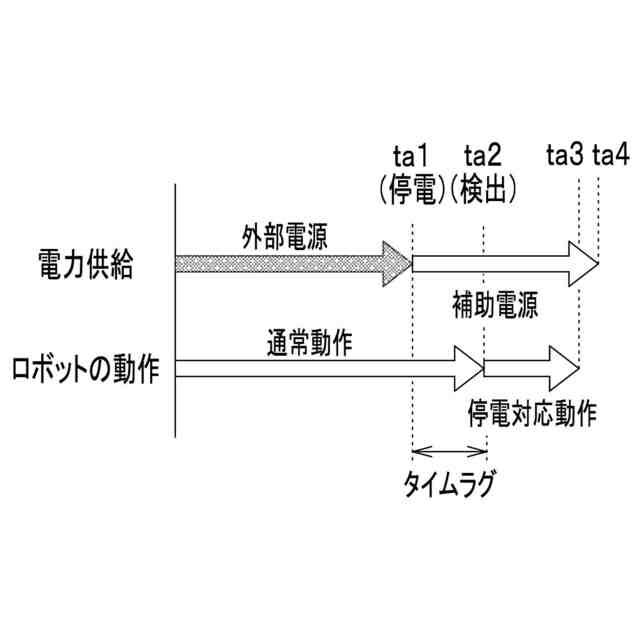
ここで、上述したような停電対策を講じる場合には、実際に停電が発生してから停電の発生を検出し停電対応した上記処理等を開始するまでのタイムラグが大きくなるほど補助電源の消費電力が嵩むこととなる。つまり、停電対策を適切に機能させる上では、補助電源の容量にそのような消費電力を見込む必要が生じ、結果として補助電源に要求される容量が大きくなる。補助電源の容量が大きくなることは、電源モジュールのコスト増加や電源モジュールの大型化を招く要因となる。そして、電源モジュールが大型化することは、当該電源モジュールの搭載対象(産業用ロボット又はロボットコントローラ)の小型化等や電源モジュール周辺の他の部品との共存を図る上で妨げになり得る。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、停電が発生したことを速やかに検出可能とすることにより、電源モジュールのコスト低減や大型化の抑制に寄与することにある。
【課題を解決するための手段】
【0006】
以下、上記課題を解決するための手段について記載する。
【0007】
第1の手段.産業用ロボットを制御するロボット制御システムであって、
交流電源である外部電源から電力が供給される入力端子と、
前記入力端子への入力電圧が特定電圧を上回っている場合に第1の値となり、前記特定電圧を下回っている場合に第2の値となるパルス信号を生成するパルス信号生成部と、
前記パルス信号生成部にて生成された前記パルス信号の値が所定期間に亘って前記第2の値となっている場合に停電対応処理を実行する停電対応処理実行部と
を備えている。
【0008】
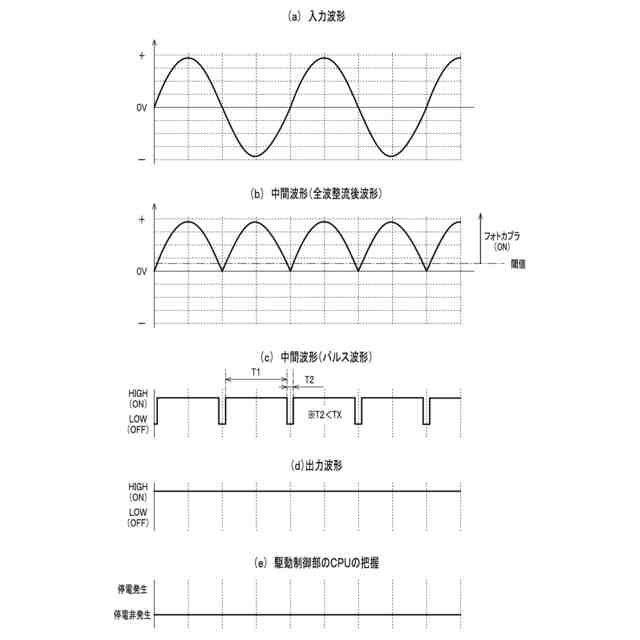
第1の手段によれば、外部電源から供給される電力(交流)からパルス信号が生成される。このパルス信号は、外部電源からの電力供給が続いている状況においては周期的に第1の値と第2の値とに変動することとなる。そして、停電が発生した場合には、パルス信号が第2の値を維持することとなるため、この第2の値となっている期間から停電を検出することができる。本手段においては、パルス信号の値が所定期間に亘って第2の値となっている場合に停電が発生したとして停電対応処理が実行される。例えばアナログ信号を解析して停電を検出するといった対応が不要であるため、検出に要する期間の短縮に寄与できる。また、直流に変換した動作用電力を監視する構成でもないため、コンデンサ等を用いて平滑化する必要がない。故に、平滑化による停電検出の遅れについても回避可能である。以上の理由から、実際に停電が発生してから停電を検出するまでの期間や停電を検出してから停電対応処理が実行されるまでの期間を短くすることができる。これは、ロボット制御システムに搭載される停電時用の補助電源の容量の低減を図り、当該補助電源を有する電源モジュールのコスト低減や大型化の抑制する上で好ましい。
【0009】
第2の手段.産業用ロボットを制御するロボット制御システムに適用さる停電監視回路であって、
交流電源である外部電源から電力が供給される入力端子と、
前記入力端子への入力電圧が特定電圧を上回っている場合に第1の値となり、前記特定電圧を下回っている場合に第2の値となるパルス信号を生成するパルス信号生成部と、
前記パルス信号生成部にて生成された前記パルス信号の値が所定期間に亘って前記第2の値となっている場合に停電検出信号を生成し、前記ロボット制御システムにおける制御部へ当該停電検出信号を出力可能な停電検出信号生成部と
を備えている。
【0010】
第2の手段によれば、実際に停電が発生してから停電を検出するまでの期間を短くすることができる。これは、ロボット制御システムに搭載される停電時用の補助電源の容量の低減を図り、当該補助電源を有する電源モジュールのコスト低減や大型化の抑制する上で好ましい。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
17日前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
10日前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
2日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
17日前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
個人
バール
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
株式会社デンソー
操縦桿
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
25日前
川崎重工業株式会社
制動システム
2日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社イノウ
給油口キャップ用開閉具
3日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
3日前
アイホン株式会社
ネジ締めカウントシステム
4日前
パナソニック株式会社
工具
3日前
パナソニック株式会社
工具
3日前
株式会社デンソーウェーブ
ロボット制御システム
23日前
学校法人法政大学
装着型アシスト装置
27日前
アピュアン株式会社
エアー式衝撃工具
20日前
株式会社マキタ
作業機
1か月前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
4日前
株式会社マキタ
インパクト工具
18日前
株式会社マキタ
インパクト工具
18日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
中国電力株式会社
電動ドライバー
24日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
SB C&S株式会社
治具セット
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































