TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059534
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169678
出願日
2023-09-29
発明の名称
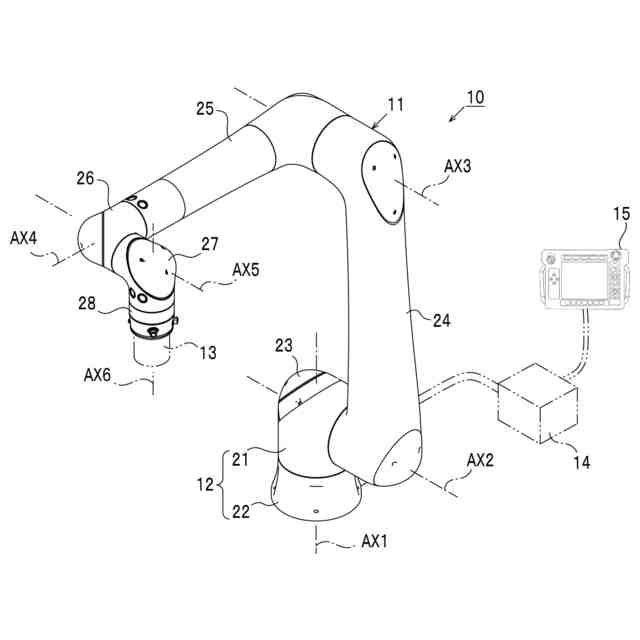
ロボット用操作端末及び安全スイッチ
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
9/22 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット用操作端末を操作する際のユーザの負担を軽減すること。
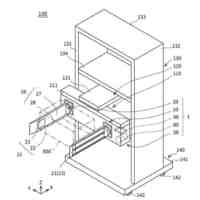
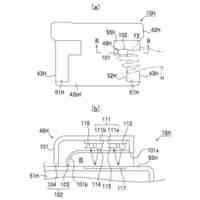
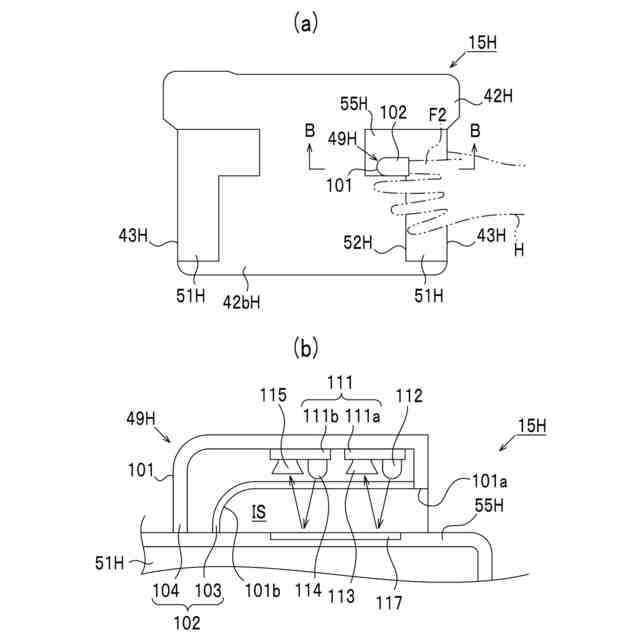
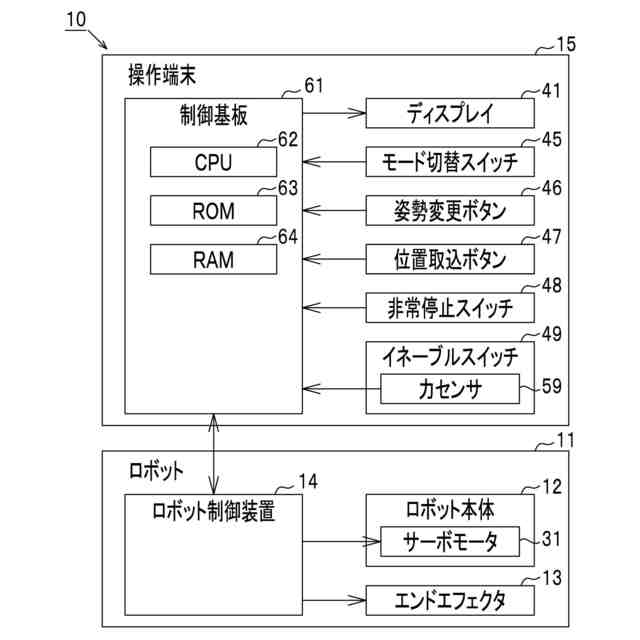
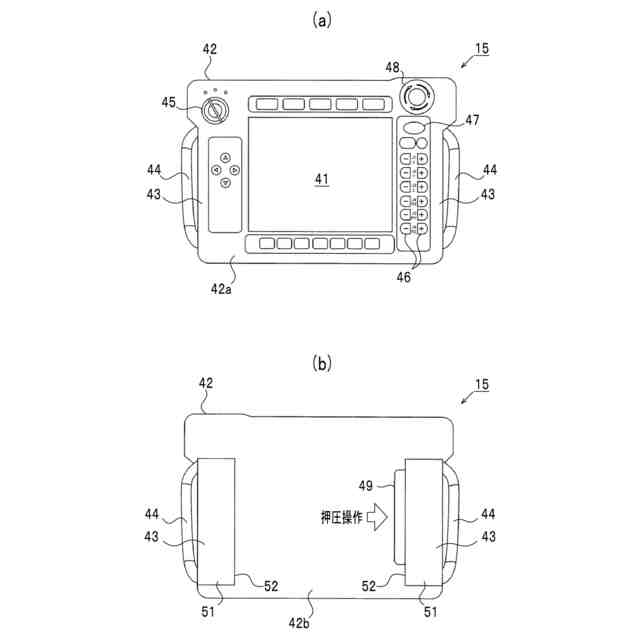
【解決手段】ロボット用の操作端末15Hの左右の端部にはユーザによって把持される把持部43Hが形成されている。この把持部43Hには、当該把持部43Hを把持している指を挿入可能な挿入部101と、当該挿入部101に挿入されている指の挿入位置を検知可能なセンサユニット111とを有してなるイネーブルスイッチ49Hが設けられている。センサユニット111により検知された挿入位置が第1挿入位置となっている場合にはロボットの動作が許可され、指が挿入部101に挿入されていない場合及びセンサユニット111により検知された挿入位置が第1挿入位置となっていない場合にはロボットの動作を不許可となる。
【選択図】 図25
特許請求の範囲
【請求項1】
産業ロボットの操作に用いられるロボット用操作端末であって、
指を挿入可能な挿入部と、前記挿入部に挿入されている指の挿入位置を検知する検知部とを有してなる安全スイッチを備え、
前記検知部により検知された挿入位置が所定位置となっている場合には前記産業ロボットの動作を許可し、指が前記挿入部に挿入されていない場合又は前記検知部により検知された挿入位置が前記所定位置となっていない場合には前記産業ロボットの動作を不許可とするロボット用操作端末。
続きを表示(約 1,200 文字)
【請求項2】
前記ロボット用操作端末の端部には、ユーザにより把持される把持部が設けられており、
前記挿入部は、前記把持部を把持している手の指の少なくとも何れかを挿入可能となる位置に形成されている請求項1に記載のロボット用操作端末。
【請求項3】
前記挿入部は、前記ロボット用操作端末の前面部及び背面部の一方に設けられており、前記一方と平行となるようにして延びている請求項1に記載のロボット用操作端末。
【請求項4】
前記所定位置は、前記挿入部の入口部分寄りとなる位置である請求項1に記載のロボット用操作端末。
【請求項5】
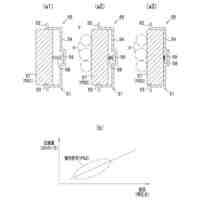
前記挿入部は、前記ロボット用操作端末における背面部又は前面部に対して指の挿入隙を隔てて対向する対向部を有してなり、
前記背面部又は前記前面部において前記対向部とともに前記挿入隙を形成している部分は、前記対向部から遠ざかるようにして変位可能な可動部となっており、
前記所定位置に挿入されている指によって前記可動部が押し込まれることにより、当該指が前記所定位置から外れるように構成されている請求項1に記載のロボット用操作端末。
【請求項6】
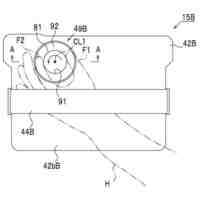
前記検知部として、第1発光部及び当該第1発光部からの光が照射される第1受光部を有する第1光センサと、第2発光部及び当該第2発光部からの光が照射される第2受光部を有する第2光センサとが設けられており、
前記第1光センサ及び前記第2光センサは、前記第1光センサが前記挿入部の入口側、前記第2光センサが前記挿入部の奥側となるように配置されており、
前記第1発光部から前記第1受光部への光路及び前記第2発光部から前記第2受光部への光路は何れも前記挿入部における指の挿入経路を横切っており、
前記第1受光部及び前記第2受光部の受光状態が何れも所定の状態となっている場合には前記産業ロボットの動作を不許可とし、前記第2受光部の受光状態が前記所定の状態となっており且つ前記第1受光部の受光状態が前記所定の状態となっていない場合には前記産業ロボットの動作を許可し、前記第1受光部及び前記第2受光部の受光状態が何れも前記所定の状態となっていない場合には前記産業ロボットの動作を不許可とする請求項1乃至請求項5のいずれか1つに記載のロボット用操作端末。
【請求項7】
産業ロボットの操作に用いられるロボット用操作端末に適用される安全スイッチであって、
指を挿入可能な挿入部と、
前記挿入部に設けられ当該挿入部に挿入されている指の挿入位置を検知する検知部と
を備え、
前記検知部により検知された挿入位置が所定位置となっている場合には前記産業ロボットの動作を許可し、指が前記挿入部に挿入されていない場合及び前記検知部により検知された挿入位置が前記所定位置となっていない場合には前記産業ロボットの動作を不許可とする安全スイッチ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業ロボットの操作に用いられるロボット用操作端末及び安全スイッチに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
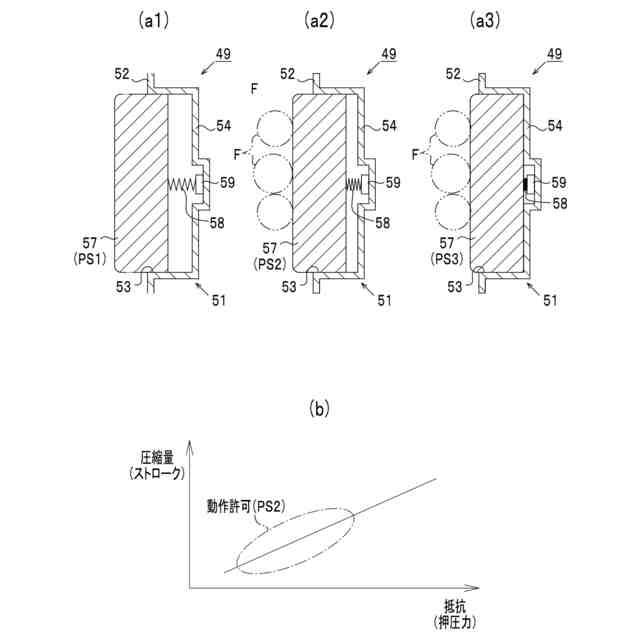
産業ロボットの操作に用いられるティーチングペンダント等の操作端末には、手動操作時の安全性向上を目的としてイネーブルスイッチが搭載されているものがある。イネーブルスイッチはロボットの手動操作を有効化又は無効化するための安全スイッチであり、近年ではこの種のスイッチとして操作子を少し押し込んだ場合(すなわち中間位置へ押し込んだ場合)にロボットの手動操作が有効化される一方、大きく押し込んだ場合には手動操作が無効となるものが提案されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2012-24848号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、手動操作が有効化された状態を継続させるには操作子を中間位置で保持する必要があり、操作子を操作している指の力が弱くなり過ぎたり強くなり過ぎたりしないように、常に一定の力を加え続ける必要がある。実際には、加える力を意識しても当該力についてはある程度の揺らぎが発生する。そこで、ユーザによっては手(指)の形に意識を向けて手を所定の形で維持するといった方法で操作することもある。但し、長時間にわたって力を加え続けたり手を同じ形に維持したりすることはユーザにとって大きな負担になり得る。これは、操作端末を用いた作業の効率を低下させる要因になると懸念される。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、ロボット用操作端末を操作する際のユーザの負担を軽減することにある。
【課題を解決するための手段】
【0006】
第1の手段.産業ロボットの操作に用いられるロボット用操作端末であって、
指を挿入可能な挿入部と、前記挿入部に挿入されている指の挿入位置を検知する検知部とを有してなる安全スイッチを備え、
前記検知部により検知された挿入位置が所定位置となっている場合には前記産業ロボットの動作を許可し、指が前記挿入部に挿入されていない場合又は前記検知部により検知された挿入位置が前記所定位置となっていない場合には前記産業ロボットの動作を不許可とする。
【0007】
挿入部へ指を挿入し、指を所定位置に留めることにより産業ロボットの動作が許可される。このような構成とすれば、従来の安全スイッチのようにバネ等の付勢力に抗して力を加え続けたり、指の形を一定の形に維持したりするといった対応が不要となる。つまり、動作が許可された状態を維持する際にユーザの指の負担が大きくなることを抑制できる。これは、ユーザの疲れを軽減し、作業効率の向上を図る上で好ましい。
【0008】
また、ユーザは、予期せぬ危険な事態に遭遇した場合に手を放す又は手を握り込むという反射動作を行うと想定される。本特徴に示す安全スイッチによれば、これらの反射動作によって指の位置が挿入部の入口側又は奥側にずれることで、指の挿入位置が所定位置から外れる等して産業ロボットの動作が不可となる。
【0009】
以上の理由から、ロボット用操作端末を使用する際の安全性の向上とユーザの負担の軽減とに寄与できる。
【0010】
第2の手段.産業ロボットの操作に用いられるロボット用操作端末に適用される安全スイッチであって、
指を挿入可能な挿入部と、
前記挿入部に設けられ当該挿入部に挿入されている指の挿入位置を検知する検知部と
を備え、
前記検知部により検知された挿入位置が所定位置となっている場合には前記産業ロボットの動作を許可し、指が前記挿入部に挿入されていない場合及び前記検知部により検知された挿入位置が前記所定位置となっていない場合には前記産業ロボットの動作を不許可とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
18日前
株式会社クレスコ
補助吸着具
11日前
株式会社不二越
ロボット
3日前
株式会社エビス
腰ベルト用連結具
18日前
個人
深孔スリーブ駆動ロッド構造
1か月前
工機ホールディングス株式会社
作業機
26日前
個人
バール
1か月前
川崎重工業株式会社
制動システム
3日前
株式会社イノウ
給油口キャップ用開閉具
4日前
株式会社不二越
垂直多関節ロボット
4日前
アイホン株式会社
ネジ締めカウントシステム
5日前
株式会社デンソーウェーブ
ロボット制御システム
24日前
パナソニック株式会社
工具
4日前
パナソニック株式会社
工具
4日前
アピュアン株式会社
エアー式衝撃工具
21日前
学校法人法政大学
装着型アシスト装置
28日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
5日前
株式会社マキタ
インパクト工具
19日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
19日前
株式会社不二越
ロボットの教示システム及び教示方法
25日前
SB C&S株式会社
治具セット
18日前
中国電力株式会社
電動ドライバー
25日前
JUKI株式会社
ハンドリング装置
1か月前
オムロン株式会社
モバイルロボット
25日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
21日前
オムロン株式会社
モバイルロボット
25日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
25日前
シナノケンシ株式会社
把持装置
25日前
株式会社星野商店
塗装ロボット用保護カバー
4日前
トーヨーコーケン株式会社
ワーク搬送システム
25日前
東京ロボティクス株式会社
物体操作方法、ロボット及びプログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ