TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025060410
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2024124418
出願日
2024-07-31
発明の名称
テレイグジスタンスの実施方法およびシステム
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
B25J
13/06 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のユーザがヒューマノイドを連続して遠隔で操作/制御できるようにする。
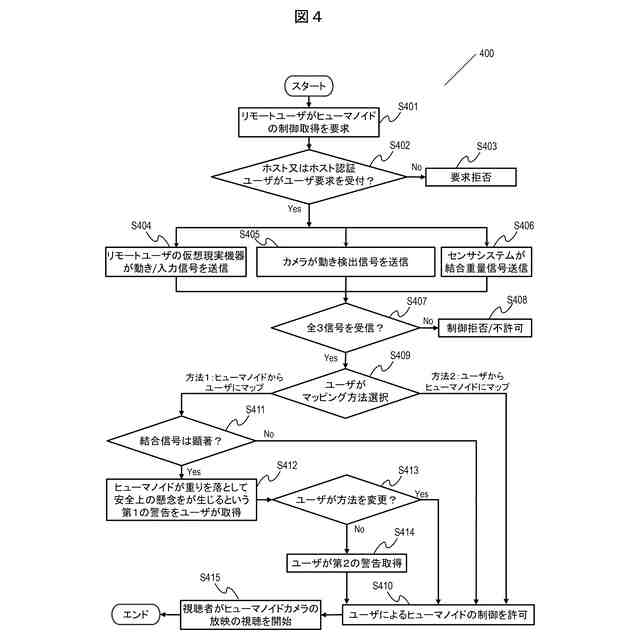
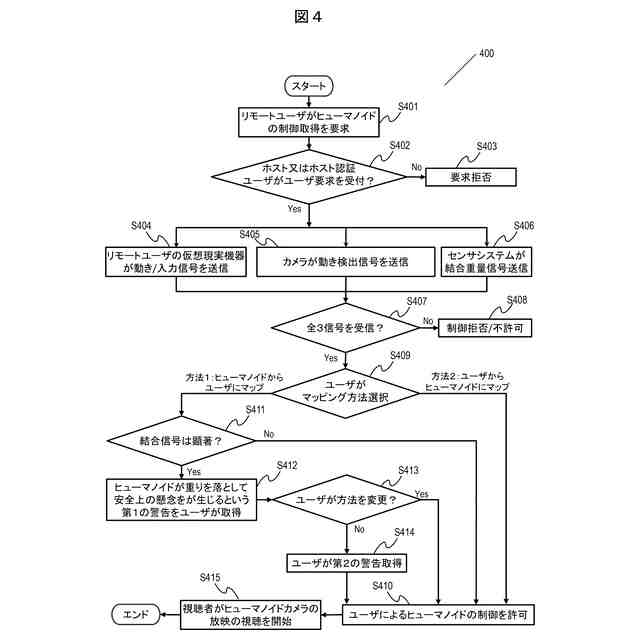
【解決手段】 プロセッサによって、ヒューマノイドを制御する要求をリモートユーザから受信し、ホストによる要求の受け付けを判定する。要求が受け付けられたと判定された場合、プロセッサによって、起動信号のセットの受信を検証し、起動信号のセットが受信された場合、リモートユーザによって選ばれたヒューマノイドマッピング方法を受信し、リモートユーザによって判定されたヒューマノイドマッピング方法に基づいて、ヒューマノイドを制御する。起動信号のセットが受信されていない場合、プロセッサによって、ヒューマノイドを制御する要求を終了する。
【選択図】図4
特許請求の範囲
【請求項1】
プロセッサによって、ヒューマノイドを制御する要求をリモートユーザから受信し、
前記プロセッサによって、ホストによる前記要求の受け付けを判定し、
前記要求が受け付けられたと判定された場合、前記プロセッサによって、起動信号のセットの受信を検証し、
前記起動信号のセットが受信された場合、前記リモートユーザによって選ばれたヒューマノイドマッピング方法を受信して、前記リモートユーザによって判定された前記ヒューマノイドマッピング方法に基づいて、前記ヒューマノイドを制御し、
前記起動信号のセットが受信されていない場合、前記プロセッサによって、前記ヒューマノイドを制御する前記要求を終了する、
テレイグジスタンスの実施方法。
続きを表示(約 2,000 文字)
【請求項2】
前記起動信号のセットは、前記リモートユーザの仮想現実機器と関連付けられた入力信号、前記リモートユーザの動き検出信号、および前記ヒューマノイドによって送信される結合重量信号を含む、請求項1に記載のテレイグジスタンスの実施方法。
【請求項3】
前記リモートユーザの前記仮想現実機器における前記ヒューマノイドに結合された第1のカメラから知覚された環境を放映することをさらに含む請求項2に記載のテレイグジスタンスの実施方法。
【請求項4】
前記動き検出信号は、前記リモートユーザに向けられた第2のカメラから得られる供給信号である、請求項2に記載のテレイグジスタンスの実施方法。
【請求項5】
前記ヒューマノイドマッピング方法に基づく前記ヒューマノイドの制御は、
前記第2のカメラを使用して、前記リモートユーザの動きを追跡し、
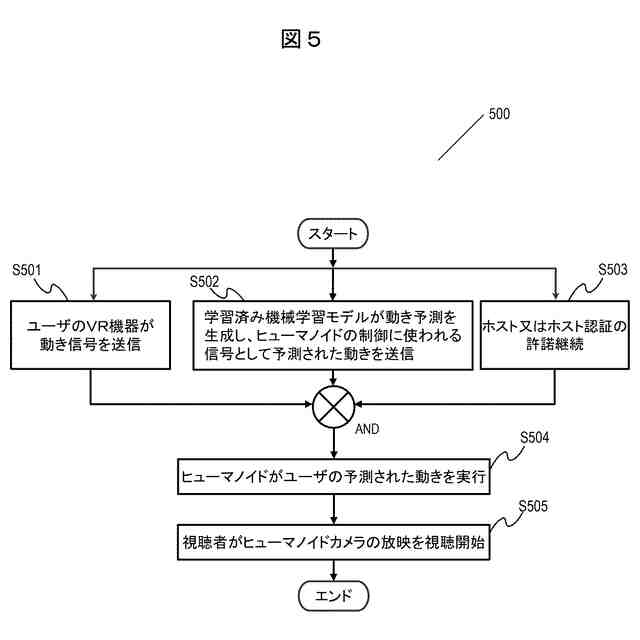
前記リモートユーザの追跡された前記動きが入力として使用される学習済み機械学習モデルを使用して、動き予測を生成し、
生成された前記動き予測に基づいて、前記ヒューマノイドの制御を実施する、
ことを含む請求項4に記載のテレイグジスタンスの実施方法。
【請求項6】
前記リモートユーザによって選ばれた前記ヒューマノイドマッピング方法の受信は、ヒューマノイドからユーザへのマッピングかユーザからヒューマノイドへのマッピングかの選択を前記リモートユーザから受信することを含む請求項1に記載のテレイグジスタンスの実施方法。
【請求項7】
前記ヒューマノイドからユーザへのマッピングが前記ヒューマノイドマッピング方法として選択された場合、
前記プロセッサによって、前記ヒューマノイドと関連付けられた結合重量荷重を判定し、
前記結合重量荷重が顕著であると判定された場合、前記プロセッサが、前記リモートユーザに対する第1の安全警告を生成し、前記第1の安全警告に応答して前記リモートユーザによって作られるヒューマノイドマッピング方法変更要求を検出し、前記ヒューマノイドマッピング方法変更要求が検出された場合、前記ヒューマノイドの制御を前記リモートユーザに許可し、
前記結合重量荷重が顕著であると判定されなかった場合、前記ヒューマノイドの制御を前記リモートユーザに許可する、
請求項6に記載のテレイグジスタンスの実施方法。
【請求項8】
前記ヒューマノイドマッピング方法変更要求が検出されなかった場合、前記プロセッサがさらに、
前記ヒューマノイドマッピング方法を確認する、前記リモートユーザに対する第2の安全警告を生成し、
前記第2の安全警告に応答してヒューマノイドマッピング方法が確認された場合、前記ヒューマノイドの制御を前記リモートユーザに許可する、
ように構成された請求項7に記載のテレイグジスタンスの実施方法。
【請求項9】
前記ユーザからヒューマノイドへのマッピングが前記ヒューマノイドマッピング方法として選択された場合、前記プロセッサによって、前記ヒューマノイドの制御を前記リモートユーザに許可する請求項8に記載のテレイグジスタンスの実施方法。
【請求項10】
前記ヒューマノイドを制御する前記要求が、前のリモートユーザによる前のテレイグジスタンスセッションにおける前記ヒューマノイドの制御が終了した後に受信され、
前記前のテレイグジスタンスセッションの終了後の前記ヒューマノイドの向きが第1の状態のままであり、
前記ユーザからヒューマノイドへのマッピングが前記ヒューマノイドマッピング方法として選択された場合、前記リモートユーザの身体を前記第1の状態の前記ヒューマノイドの前記向きにマッピングし、
前記ヒューマノイドからユーザへのマッピングが前記ヒューマノイドマッピング方法として選択され、前記結合重量荷重が顕著であると判定されなかった場合、前記ヒューマノイドを前記リモートユーザの前記身体にマッピングすることによって、前記ヒューマノイドの前記向きを第2の状態に変更し、
前記ヒューマノイドからユーザへのマッピングが前記ヒューマノイドマッピング方法として選択され、前記ヒューマノイドマッピング方法変更要求が検出された場合、前記リモートユーザの前記身体を前記第1の状態の前記ヒューマノイドの前記向きにマッピングし、
前記ヒューマノイドからユーザへのマッピングが前記ヒューマノイドマッピング方法として選択され、前記ヒューマノイドマッピング方法変更要求が検出されなかった場合、前記ヒューマノイドの前記向きを前記第2の状態に変更する、
請求項9に記載のテレイグジスタンスの実施方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、テレイグジスタンスを実施するための方法およびシステムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
情報技術(IT)分野では、世界中のさまざまな地域に亘る人々との協働は、今ではコラボレーションソフトウェアを使用して可能になっている。コラボレーションソフトウェアの使用によって、ユーザがリアルタイムで材料を共有し、検討し、修正することが可能になっている。しかしながら、かかるインタラクティブな協働のソフトウェアまたはハードウェアは、物理的インタラクションが関与する分野では利用不能である。従来の協働方法では、参加者がリアルタイムで単一の場所に物理的に存在する必要がある。ミーティング場所までの移動は、追加の運用コストを発生させるとともに遅延の原因となる傾向があり、それが顧客満足度の低減につながることがある。
【0003】
テレイグジスタンスは、ユーザがヒューマノイドまたはロボットを遠隔で制御し、実世界の物体を用いて行動を実施し、それによってユーザが物理的空間で影響し合うことを可能にする概念である。しかしながら、ヒューマノイドの制御は単一のイベントにおける単一のユーザに限定されるので、複数ユーザのためのテレイグジスタンスを通した協働は限定される。
【先行技術文献】
【特許文献】
【0004】
特開2020-40155号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
関連技術では、仮想現実(VR)ヘッドセットおよび携帯ハードウェアを通して、一人で遠隔でヒューマノイドを制御する方法が開示されている。しかしながら、その方法では、単一の機能/イベントにおいて連続して複数のユーザがヒューマノイドを遠隔で操作/制御することはできず、遠隔で接続された視聴者がヒューマノイドの行動を遠隔で見ることもできない。
【0006】
関連技術では、定置式操縦システムを通してヒューマノイドを制御する方法が開示されている。定置式操縦システムにより、操縦システムのウェアラブル制御装置を通して、ユーザの行動をマッピング/模倣することによってヒューマノイドを操作することが可能になる。しかしながら、定置式操縦システム自体が高価な可能性があり、複数のユーザがヒューマノイドを連続して遠隔で操作/制御することはできない。
【課題を解決するための手段】
【0007】
本開示の一つの態様は、テレイグジスタンスを実施する革新的な方法が関与する。方法は、プロセッサによって、ヒューマノイドを制御する要求をリモートユーザから受信し、プロセッサによって、ホストによる要求の受け付けを判定し、要求が受け付けられたと判定された場合、プロセッサによって、起動信号のセットの受信を検証し、起動信号のセットが受信された場合、リモートユーザによって選ばれたヒューマノイドマッピング方法を受信して、リモートユーザによって判定されたヒューマノイドマッピング方法に基づいて、ヒューマノイドを制御し、起動信号のセットが受信されていない場合、プロセッサによって、ヒューマノイドを制御する要求を終了する。
【図面の簡単な説明】
【0008】
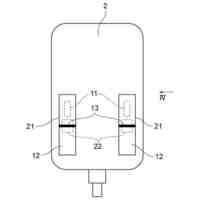
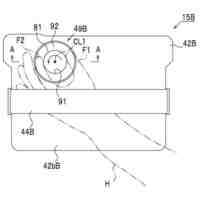
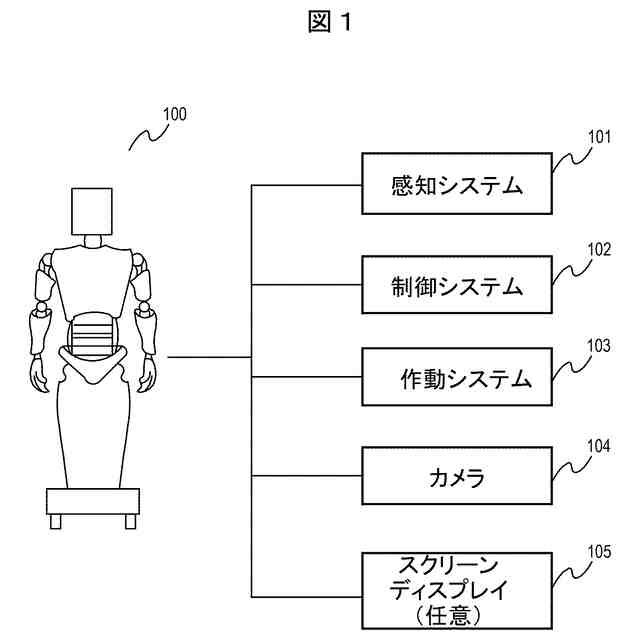
一実施例による、ヒューマノイド100のシステム例を示す図である。
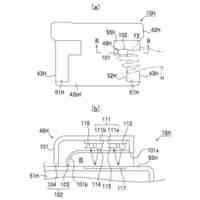
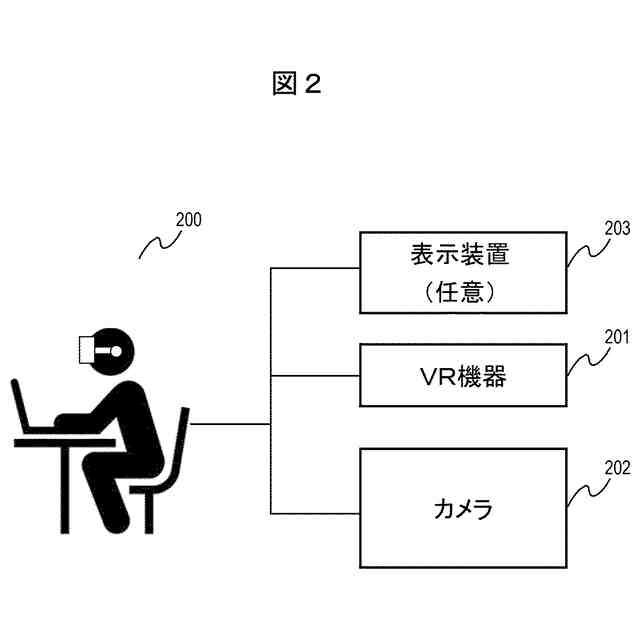
一実施例による、リモートユーザがヒューマノイド100を制御するためのリモート構成200の一例を示す図である。
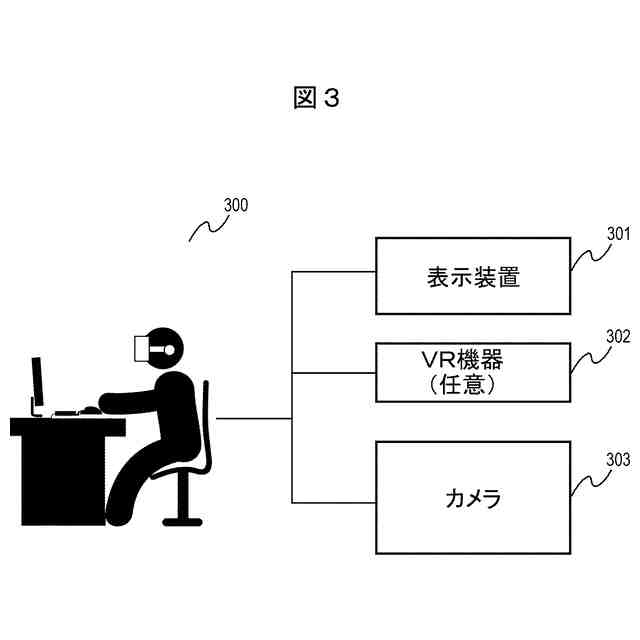
一実施例による、リモート視聴者構成300の一例を示す図である。
一実施例による、テレイグジスタンスを実施するプロセスフロー400の一例を示す図である。
一実施例による、リモートユーザがヒューマノイド100の制御を渡された後にテレイグジスタンスを実施するプロセスフロー500の一例を示す図である。
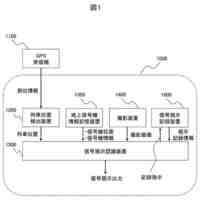
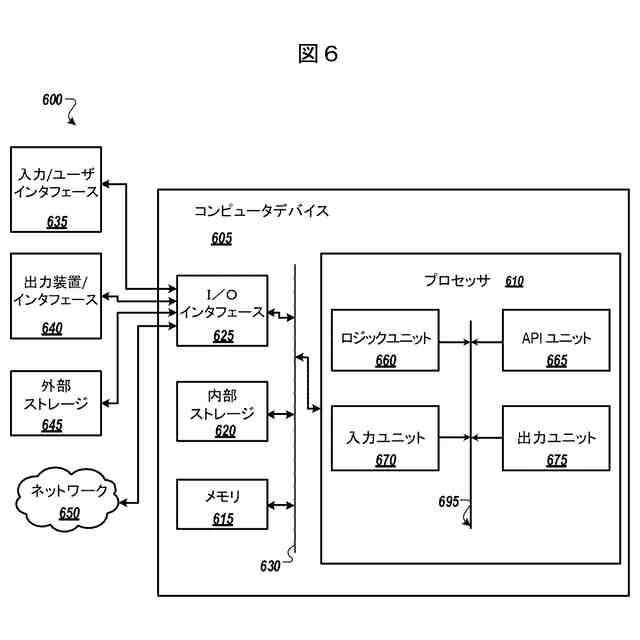
いくつかの実施例で使用するのに適したコンピューティングデバイス例を有するコンピューティング環境例を示す図である。
【発明を実施するための形態】
【0009】
以下、本開示の様々な特徴を実現する一般的なアーキテクチャについて、図面を参照して記載する。図面および関連する記載は、本開示の実施例を説明するために提供されるものであって、本開示の範囲を限定するものではない。図面全体を通して、参照される要素間の対応を示すため、参照番号が再使用される。
【0010】
以下の詳細な記載は、本出願の図面および実施例の詳細を提供する。図面間で重複する要素の参照番号および記載は、明瞭にするために省略する。記載全体を通して使用される用語は、例として提供されるものであり、限定することを意図するものではない。例えば、「自動」という用語の使用は、本出願の実例を実践する当業者における所望の実例に応じて、完全自動の実施、あるいは実施の特定の態様に対するユーザまたは管理者の制御を要する半自動の実施を含むことがある。選択は、ユーザがユーザインターフェースまたは他の入力手段を通して実施することができ、あるいは所望のアルゴリズムを通して実現することができる。本明細書に記載するような実施例は、単独でまたは組み合わせて利用することができ、実施例の機能は、所望の実現例による任意の手段を通して実現することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
地上信号機認識装置及び地上信号機の信号現示認識方法
2日前
川崎重工業株式会社
ハンド
25日前
個人
けがき用治具
19日前
株式会社不二越
ロボット
17日前
株式会社不二越
ロボット操作装置
16日前
個人
深孔スリーブ駆動ロッド構造
9日前
川崎重工業株式会社
ロボット
17日前
工機ホールディングス株式会社
作業機
4日前
川崎重工業株式会社
ロボットシステム
25日前
株式会社デンソー
操縦桿
17日前
株式会社黒澤鉄工製作所
けがき用治具
19日前
個人
バール
9日前
梅馨堂合同会社
人協働ロボットシステム
11日前
ARMA株式会社
UI付エンドエフェクタ
12日前
株式会社不二越
基板搬送用ロボット
26日前
株式会社デンソーウェーブ
ロボット制御システム
2日前
若井ホールディングス株式会社
レンチ構造とその製造方法
19日前
株式会社マキタ
作業機
16日前
学校法人法政大学
装着型アシスト装置
6日前
三菱電機株式会社
トルク締め個所検出システム
9日前
高丸工業株式会社
ロボット操作システムの動作方法
9日前
シブヤパッケージングシステム株式会社
物品移載装置
17日前
株式会社不二越
ロボットの教示システム及び教示方法
3日前
中国電力株式会社
電動ドライバー
3日前
JUKI株式会社
ハンドリング装置
11日前
株式会社不二越
通信端末装置及びロボット制御システム
1か月前
株式会社デンソー
作業装置および作業プログラム
17日前
株式会社ベッセル工業
インパクト工具
17日前
不二空機株式会社
エアツール及びエアツールの使用方法
25日前
株式会社デンソー
解体装置および解体プログラム
17日前
オムロン株式会社
モバイルロボット
3日前
オムロン株式会社
モバイルロボット
3日前
学校法人 名古屋電気学園
制御システム
23日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
3日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
3日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ