TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025047718
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023156379
出願日
2023-09-21
発明の名称
ロボットの制御方法およびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】優れた振動抑制効果を有するロボットの制御方法およびロボットシステムを提供すること。
【解決手段】ロボットの制御方法は、アームの動作を計測する慣性センサーからの出力信号を受信する慣性情報受信ステップと、前記アームの動作の変化に応じて、前記出力信号または前記出力信号から生成される信号に乗算するフィードバックゲインを高める調整を行う第1フィードバックゲイン調整ステップと、前記第1フィードバックゲイン調整ステップにおいて高められた前記フィードバックゲインを用いて前記アームの駆動を制御する駆動制御ステップと、前記第1フィードバックゲイン調整ステップから所定時間が経過した後に前記フィードバックゲインを下げる調整を行う第2フィードバックゲイン調整ステップと、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
アームの動作を計測する慣性センサーからの出力信号を受信する慣性情報受信ステップと、
前記アームの動作の変化に応じて、前記出力信号または前記出力信号から生成される信号に乗算するフィードバックゲインを高める調整を行う第1フィードバックゲイン調整ステップと、
前記第1フィードバックゲイン調整ステップにおいて高められた前記フィードバックゲインを用いて前記アームの駆動を制御する駆動制御ステップと、
前記第1フィードバックゲイン調整ステップから所定時間が経過した後に前記フィードバックゲインを下げる調整を行う第2フィードバックゲイン調整ステップと、を含むことを特徴とするロボットの制御方法。
続きを表示(約 1,700 文字)
【請求項2】
前記第1フィードバックゲイン調整ステップでは、前記フィードバックゲインを基準値から、前記基準値よりも高い値に変更し、
前記第2フィードバックゲイン調整ステップでは、前記フィードバックゲインを前記基準値に戻す請求項1に記載のロボットの制御方法。
【請求項3】
前記出力信号には、前記動作により前記アームに生じる慣性に関する情報である慣性情報が含まれ、
前記第1フィードバックゲイン調整ステップは、
前記アームの加速開始時において前記慣性情報の増加が開始する第1タイミング、
前記アームの加速開始時において前記慣性情報の増加が終了する第2タイミング、
前記アームの加速終了時において前記慣性情報の減少が開始する第3タイミング、
前記アームの加速終了時において前記慣性情報の減少が終了する第4タイミング、
前記アームの減速開始時において前記慣性情報の増加が開始する第5タイミング、
前記アームの減速開始時において前記慣性情報の増加が終了する第6タイミング、
前記アームの減速終了時において前記慣性情報の減少が開始する第7タイミング、
前記アームの減速終了時において前記慣性情報の減少が終了する第8タイミング、
の少なくとも1つで行われる請求項1に記載のロボットの制御方法。
【請求項4】
前記フィードバックゲインは、前記フィードバックゲインの基準となるフィードバックベースゲインに、フィードバック係数を乗算することにより求められ、
前記第1フィードバックゲイン調整ステップおよび前記第2フィードバックゲイン調整ステップでは、それぞれ、前記フィードバック係数を変更することにより、前記フィードバックゲインを調整する請求項1に記載のロボットの制御方法。
【請求項5】
前記第1フィードバックゲイン調整ステップでは、前記第1タイミング、前記第2タイミング、前記第3タイミング、前記第4タイミング、前記第5タイミング、前記第6タイミング、前記第7タイミング、前記第8タイミングから選択される任意の2つのタイミングにおいて、互いに異なる前記フィードバックゲインに調整する請求項3に記載のロボットの制御方法。
【請求項6】
前記第1フィードバックゲイン調整ステップでは、前記第1タイミング、前記第2タイミング、前記第3タイミング、前記第4タイミング、前記第5タイミング、前記第6タイミング、前記第7タイミング、前記第8タイミングから選択される任意の2つのタイミングにおいて、前記所定時間が互いに異なっている請求項3に記載のロボットの制御方法。
【請求項7】
前記慣性情報の変化は、前記アームに対する位置指令に基づいて検出する請求項1に記載のロボットの制御方法。
【請求項8】
前記第1タイミング、前記第3タイミング、前記第5タイミング、前記第7タイミングは、前記慣性情報が閾値を超えるタイミングである請求項3に記載のロボットの制御方法。
【請求項9】
前記第1フィードバックゲイン調整ステップでは、前記アームがCP動作する場合とPTP動作する場合とで、前記フィードバックゲインを調整する条件を異ならせる請求項1に記載のロボットの制御方法。
【請求項10】
ベースと、
前記ベースに対して駆動するアームと、
前記アームの動作を検出する慣性センサーと、
前記アームの駆動を制御する制御部と、を有し、
前記制御部は、
前記慣性センサーからの出力信号を受信し、
前記アームの動作の変化に応じて、前記出力信号または前記出力信号から生成される信号に乗算するフィードバックゲインを高める調整を行い、
前記調整後の前記フィードバックゲインを用いて前記アームの駆動を制御し、
前記フィードバックゲインを高めてから所定時間が経過した後に前記フィードバックゲインを下げる調整を行うことを特徴とするロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの制御方法およびロボットシステムに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
特許文献1に記載されているロボットは、ベースと、ベースに対して回動可能に連結された第1アームと、第1アームを駆動する第1モーターと、第1モーターの回転角を検出する第1角度センサーと、ベースに対する第1アームの角速度を検出する第1角速度センサーと、第1アームに対して回動可能に連結された第2アームと、第2アームを駆動する第2モーターと、第2モーターの回転角を検出する第2角度センサーと、第1アームに対する第2アームの角速度を検出する第2角速度センサーと、を有する。そして、第1角度センサーの出力と第1角速度センサーの出力とを用いて第1アームの回動角を検出し、第2角度センサーの出力と第2角速度センサーの出力とを用いて第2アームの回動角を検出する。さらには、この検出結果をフィードバックしてロボットの制振制御を行っている。
【先行技術文献】
【特許文献】
【0003】
特開2005-242794号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の方法では、第1、第2アームの動作方向における振動については低減することができるが、それ以外の方向の振動、例えば、回動軸に沿う方向の振動については低減することができない。また、動作方向とは異なる方向の振動が生じた場合、上述の方法では、この振動をフィードバックしてしまうため、第1、第2アームの動作が不安定となり、制振効果が低下するおそれもある。つまり、特許文献1の方法では、優れた制振制御をおこなうことができない。
【課題を解決するための手段】
【0005】
本発明のロボットの制御方法は、アームの動作を計測する慣性センサーからの出力信号を受信する慣性情報受信ステップと、
前記アームの動作の変化に応じて、前記出力信号または前記出力信号から生成される信号に乗算するフィードバックゲインを高める調整を行う第1フィードバックゲイン調整ステップと、
前記第1フィードバックゲイン調整ステップにおいて高められた前記フィードバックゲインを用いて前記アームの駆動を制御する駆動制御ステップと、
前記第1フィードバックゲイン調整ステップから所定時間が経過した後に前記フィードバックゲインを下げる調整を行う第2フィードバックゲイン調整ステップと、を含む。
【0006】
本発明のロボットシステムは、ベースと、
前記ベースに対して駆動するアームと、
前記アームの動作を検出する慣性センサーと、
前記アームの駆動を制御する制御部と、を有し、
前記制御部は、
前記慣性センサーからの出力信号を受信し、
前記アームの動作の変化に応じて、前記出力信号または前記出力信号から生成される信号に乗算するフィードバックゲインを高める調整を行い、
前記調整後の前記フィードバックゲインを用いて前記アームの駆動を制御し、
前記フィードバックゲインを高めてから所定時間が経過した後に前記フィードバックゲインを下げる調整を行う。
【図面の簡単な説明】
【0007】
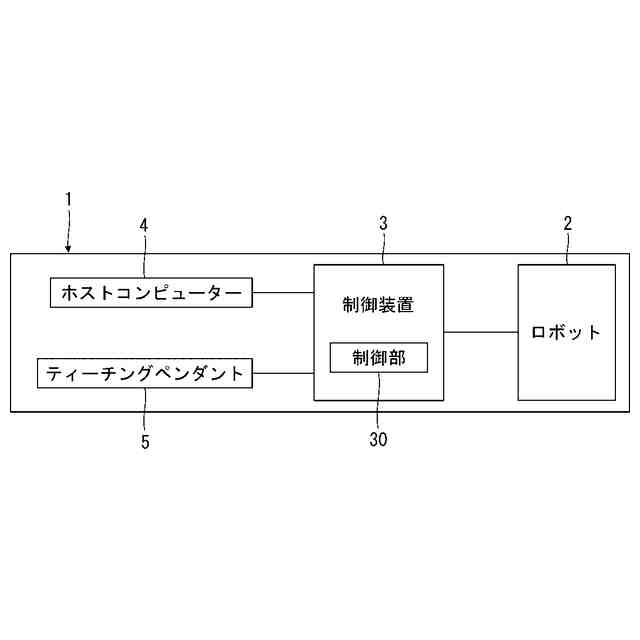
第1実施形態に係るロボットシステムの構成を示すブロック図である。
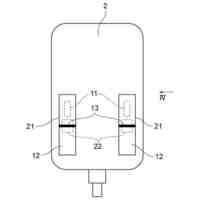
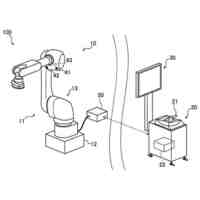
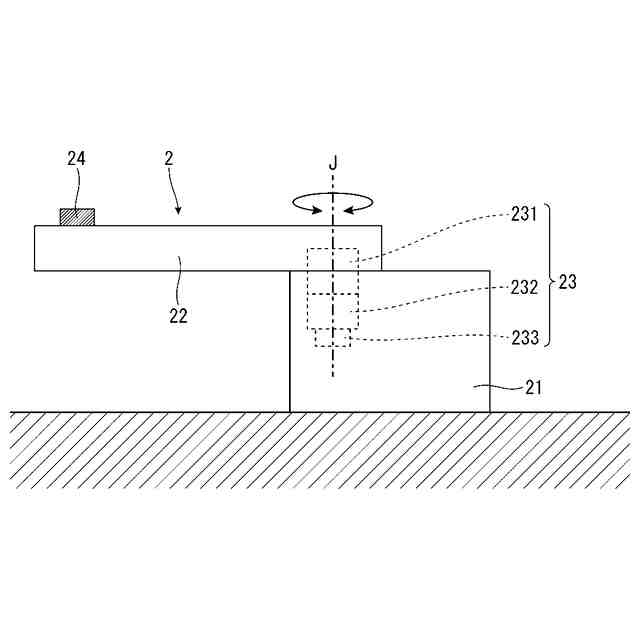
図1のロボットシステムが有するロボットを示す図である。
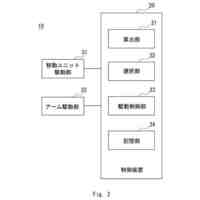
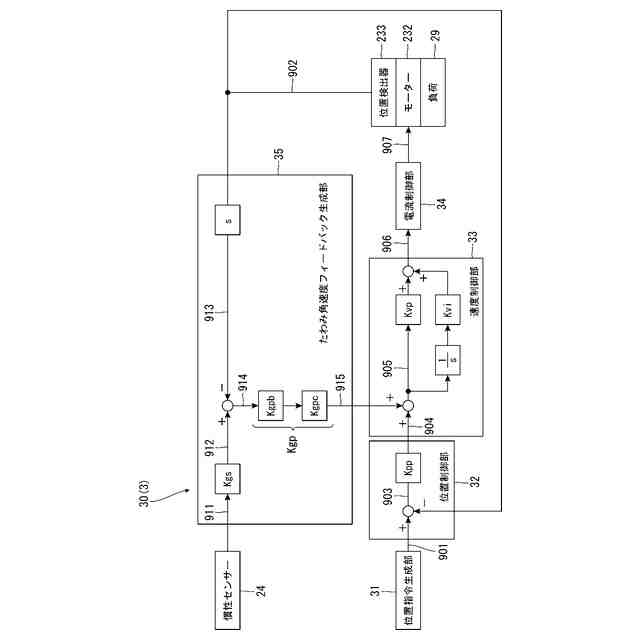
図1のロボットシステムが有する制御部を示すブロック図である。
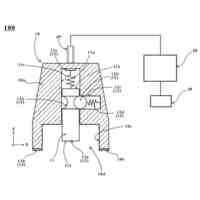
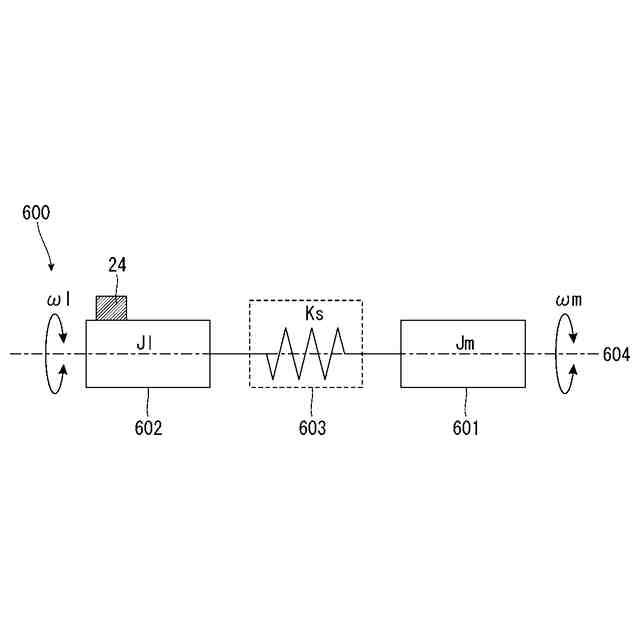
ロボットの回動部の2慣性系モデルを示す図である。
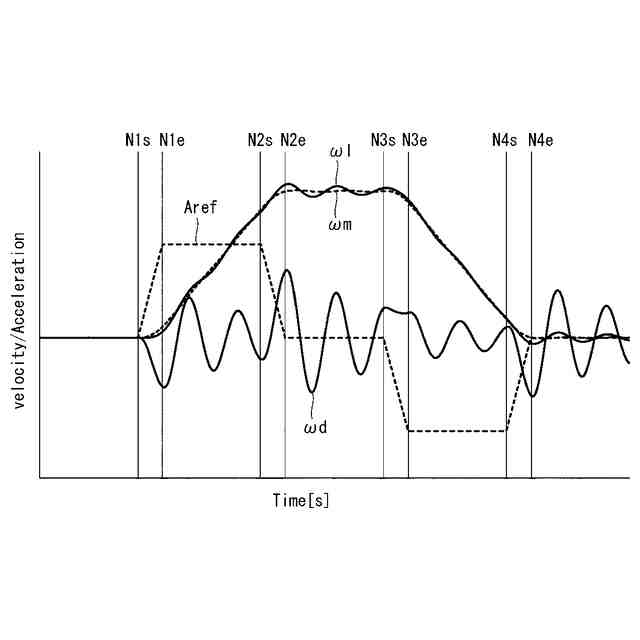
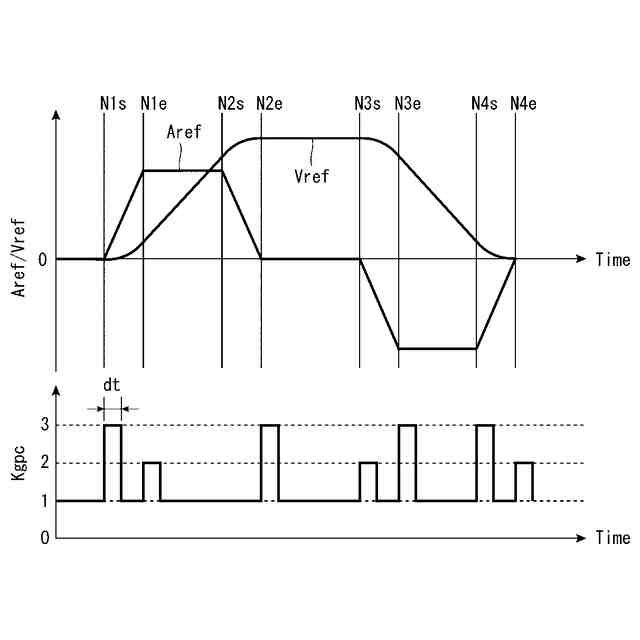
アームのPTP動作時における角加速度指令Aref、駆動要素角速度ωm、被駆動要素角速度ωlおよびたわみ角速度ωdの変化を示すグラフである。
たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
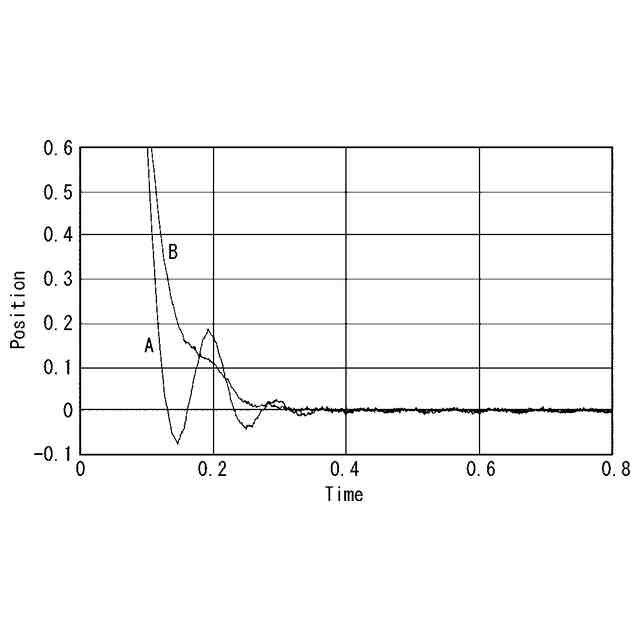
アームの残留振動抑制効果を示すグラフである。
ロボットの制御方法を示すフローチャートである。
第2実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第3実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第4実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第5実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第6実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第7実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第8実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第9実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第10実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第11実施形態に係るロボットシステムおいて実施される、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
第12実施形態に係るロボットシステムが有するロボットを示す図である。
図19のロボットシステムが有する制御部を示すブロック図である。
ロボットの直動部の2慣性系モデルを示す図である。
スプラインシャフトの動作時における加速度指令Aref’、速度V1、速度V2の変化を示すグラフである。
たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。
スプラインシャフトの残留振動抑制効果を示すグラフである。
第13実施形態に係るロボットシステムが有するロボットを示す図である。
第14実施形態に係るロボットシステムが有するロボットを示す図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットの制御方法およびロボットシステムを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
図1は、第1実施形態に係るロボットシステムの構成を示すブロック図である。図2は、図1のロボットシステムが有するロボットを示す図である。図3は、図1のロボットシステムが有する制御部を示すブロック図である。図4は、ロボットの回動部の2慣性系モデルを示す図である。図5は、アームのPTP動作時における角加速度指令Aref、駆動要素角速度ωm、被駆動要素角速度ωlおよびたわみ角速度ωdの変化を示すグラフである。図6は、たわみ角速度フィードバックゲインKgpを調整する処理の一例を示すタイミングチャートである。図7は、アームの残留振動抑制効果を示すグラフである。図8は、ロボットの制御方法を示すフローチャートである。
【0010】
図1に示すロボットシステム1は、ロボット2と、制御装置3と、ホストコンピューター4と、ティーチングペンダント5と、を有する。ホストコンピューター4では、ロボット2を動作させるためのプログラムが作成される。ティーチングペンダント5は、ロボット2に動作を教示する際に使用される。また、制御装置3は、ホストコンピューター4で作成されたプログラムに基づいてロボット2の駆動を制御する制御部30を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
22日前
株式会社アイセイ
搬送装置
28日前
株式会社不二越
ロボット
14日前
個人
けがき用治具
16日前
個人
深孔スリーブ駆動ロッド構造
6日前
株式会社不二越
ロボット操作装置
13日前
川崎重工業株式会社
ロボット
14日前
株式会社デンソー
操縦桿
14日前
個人
バール
6日前
株式会社黒澤鉄工製作所
けがき用治具
16日前
工機ホールディングス株式会社
作業機
1日前
川崎重工業株式会社
ロボットシステム
22日前
梅馨堂合同会社
人協働ロボットシステム
8日前
ARMA株式会社
UI付エンドエフェクタ
9日前
株式会社不二越
基板搬送用ロボット
23日前
学校法人法政大学
装着型アシスト装置
3日前
若井ホールディングス株式会社
レンチ構造とその製造方法
16日前
株式会社マキタ
作業機
13日前
三菱電機株式会社
トルク締め個所検出システム
6日前
高丸工業株式会社
ロボット操作システムの動作方法
6日前
シブヤパッケージングシステム株式会社
物品移載装置
14日前
株式会社ベッセル工業
インパクト工具
14日前
JUKI株式会社
ハンドリング装置
8日前
株式会社デンソー
解体装置および解体プログラム
14日前
株式会社デンソー
作業装置および作業プログラム
14日前
不二空機株式会社
エアツール及びエアツールの使用方法
22日前
株式会社不二越
通信端末装置及びロボット制御システム
27日前
学校法人 名古屋電気学園
制御システム
20日前
株式会社SUBARU
ボルトの電動締結工具
9日前
株式会社バイナス
ロボット可搬装置を有する自律走行搬送システム
20日前
マックス株式会社
ステープル取り外し装置
28日前
住友林業株式会社
ビスなどの打ち込み装置用スタンド
22日前
マックス株式会社
ステープル取り外し装置
28日前
川崎重工業株式会社
ロボットシステム、および、画像処理方法
28日前
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
28日前
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
28日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ