TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035336
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142320
出願日
2023-09-01
発明の名称
動作軌跡生成方法および動作軌跡生成装置
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アクセスポイントが3つ以上ある場合でも、動作軌跡を生成するためのユーザの負担が大きくなることを抑制可能な動作軌跡生成方法を提供する。
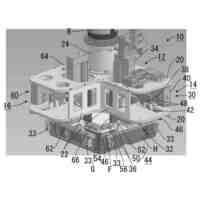
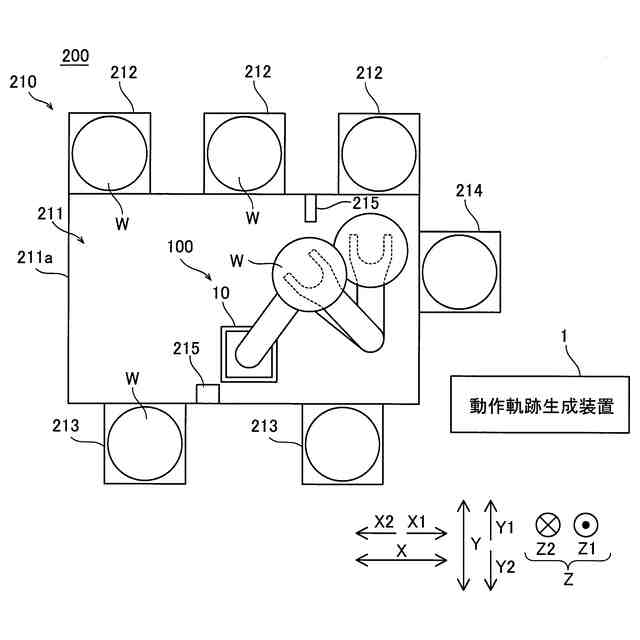
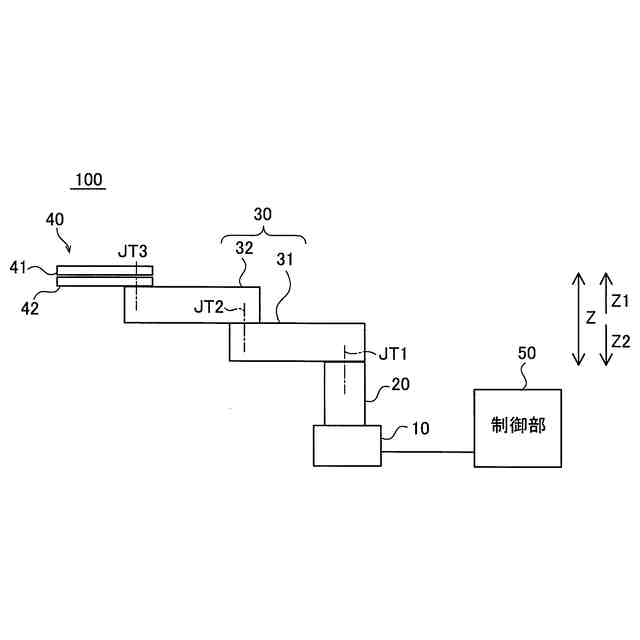
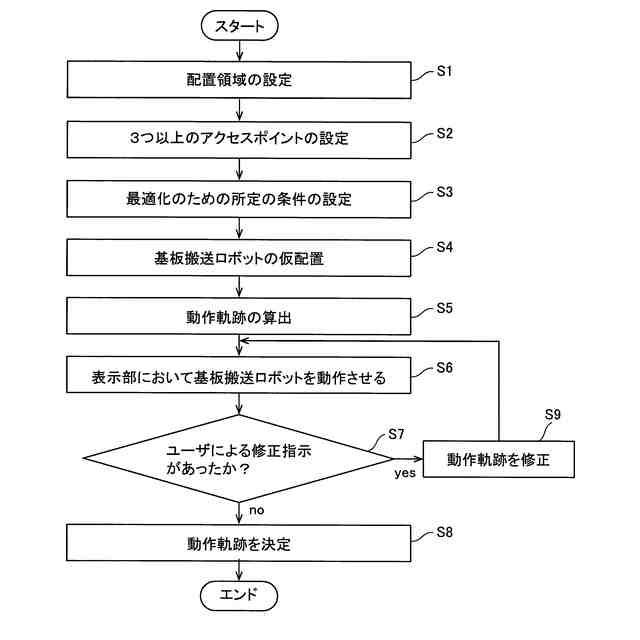
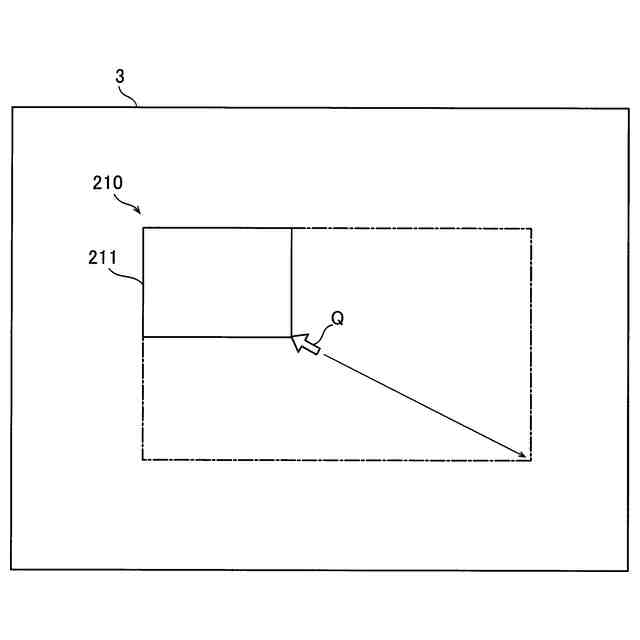
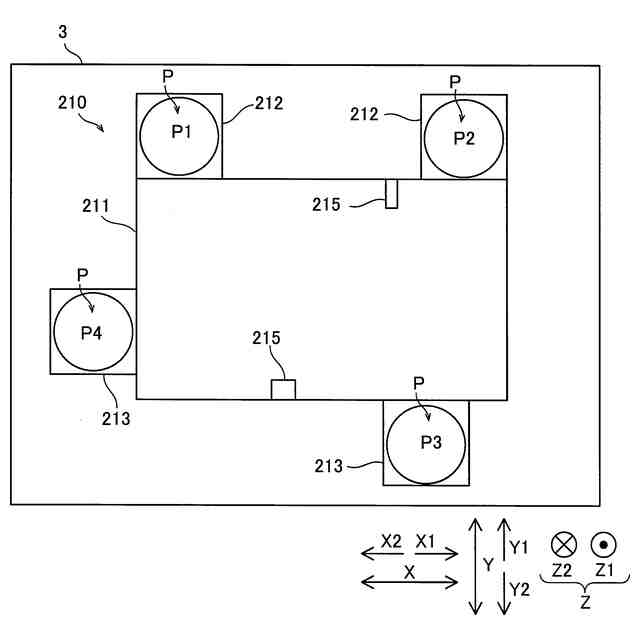
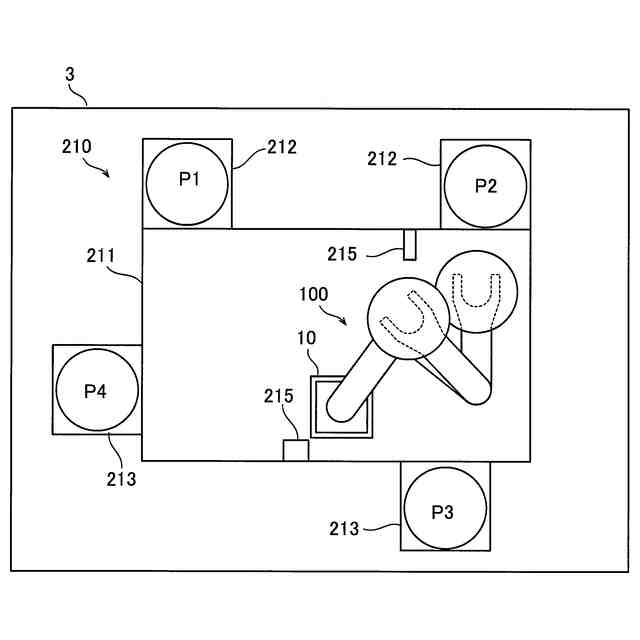
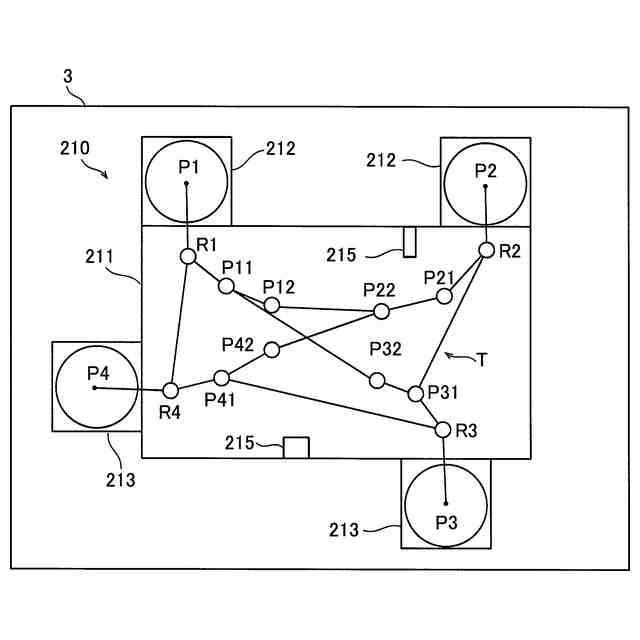
【解決手段】この動作軌跡生成方法は、半導体基板Wを保持するハンド40が取り付けられるロボットアーム30を含む基板搬送ロボット100の動作軌跡Tを生成する動作軌跡生成方法である。動作軌跡生成方法は、ロボットアーム30および半導体基板Wが配置される配置領域210の設定を受け付けることと、配置領域210において、ハンド40がアクセスする3つ以上のアクセスポイントPの設定を受け付けることと、3つ以上のアクセスポイントP同士の全ての組み合わせについて、半導体基板Wの搬送に要する時間を含む所定の条件に基づいて最適化された動作軌跡Tをシミュレーションにより算出することと、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
ワークを保持するエンドエフェクタが取り付けられるロボットアームを含むロボットの動作軌跡を生成する動作軌跡生成方法であって、
前記ロボットアームおよび前記ワークが配置される配置領域の入力を受け付けることと、
前記配置領域において、前記エンドエフェクタがアクセスする3つ以上のアクセスポイントの入力を受け付けることと、
3つ以上の前記アクセスポイント同士の全ての組み合わせについて、前記ワークの搬送に要する時間を含む所定の条件に基づいて最適化された動作軌跡をシミュレーションにより算出することと、を備える、動作軌跡生成方法。
続きを表示(約 1,100 文字)
【請求項2】
前記所定の条件は、
3つ以上の前記アクセスポイントの全てのアクセスに要する時間を最も短くすることと、
3つ以上の前記アクセスポイントのうち優先されるアクセスポイントへのアクセスに要する時間を他のアクセスポイントよりも短くすることと、のうちの少なくとも一方を含む、請求項1に記載の動作軌跡生成方法。
【請求項3】
前記所定の条件の選択を受け付けることを備える、請求項2に記載の動作軌跡生成方法。
【請求項4】
前記動作軌跡をシミュレーションにより算出することは、予め設定された前記エンドエフェクタが経由する経由点を経由しながら、最適化された前記動作軌跡をシミュレーションにより算出することを含む、請求項1に記載の動作軌跡生成方法。
【請求項5】
前記動作軌跡をシミュレーションにより算出することは、前記エンドエフェクタが特定の経由点を経由する制限をかけずに、最適化された前記動作軌跡をシミュレーションにより算出することを含む、請求項1に記載の動作軌跡生成方法。
【請求項6】
前記動作軌跡をシミュレーションにより算出することは、前記エンドエフェクタが経由する経由点を最適化し、最適化された前記経由点を経由しながら最適化された前記動作軌跡をシミュレーションにより算出することを含む、請求項1に記載の動作軌跡生成方法。
【請求項7】
前記ロボットアームには、複数の前記エンドエフェクタが取り付けられており、
前記動作軌跡をシミュレーションにより算出することは、前記エンドエフェクタ毎に、最適化された前記動作軌跡をシミュレーションにより算出することを含む、請求項1に記載の動作軌跡生成方法。
【請求項8】
前記動作軌跡をシミュレーションにより算出することは、前記エンドエフェクタに前記ワークが保持されている状態と、前記エンドエフェクタに前記ワークが保持されていない状態とに対して、前記エンドエフェクタの動作を制御するパラメータを異ならせて、最適化された前記動作軌跡をシミュレーションにより算出することを含む、請求項1に記載の動作軌跡生成方法。
【請求項9】
前記ワークは、半導体基板を含み、
前記エンドエフェクタは、ハンドを含み、
前記ロボットアームは、水平多関節型のロボットアームを含む、請求項1に記載の動作軌跡生成方法。
【請求項10】
前記配置領域は、
前記ロボットが配置される配置室と、
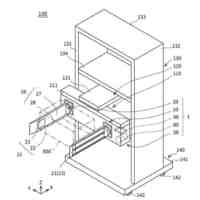
前記半導体基板が載置されるフープと、前記半導体基板に対する処理が実行される処理装置と、のうちの少なくとも1つと、を含む、請求項9に記載の動作軌跡生成方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、動作軌跡生成方法および動作軌跡生成装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、ロボットの動作軌跡生成方法が知られている。特許文献1には、ロボットアームを動作させる動作軌跡を生成する動作軌跡生成方法が開示されている。特許文献1の動作軌跡生成方法では、ロボットアームに対して、動作の始点と終点とが設定される。そして、予め設定されている障害物を回避するように、ロボットアームの動作軌跡が計算により求められる。また、計算されたロボットアームの動作軌跡が回り道をしないように最短の動作軌跡が探索される。また、計算された動作軌跡をロボットアームが最短の時間で動作できるように、ロボットアームの各関節の回転速度や加速度などが計算される。このように、特許文献1の動作軌跡生成方法では、ロボットアームの動作軌跡が最適化されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-193975号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、ロボットアームの動作軌跡を計算する際に、動作の始点と終点との2点しか設定できない。このため、ロボットアームがアクセスするアクセスポイントが3つ以上ある場合には、ユーザは、アクセスポイント同士の組み合わせの数の分、始点と終点とを設定する操作を実行する必要がある。このため、ロボットアームの動作軌跡を生成するためのユーザの負担が大きくなるという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、アクセスポイントが3つ以上ある場合でも、動作軌跡を生成するためのユーザの負担が大きくなることを抑制可能な動作軌跡生成方法および動作軌跡生成装置を提供することである。
【課題を解決するための手段】
【0006】
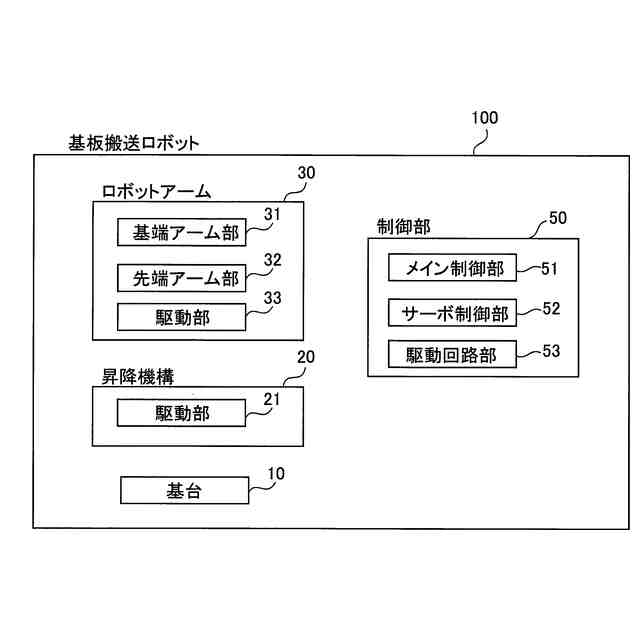
この開示の第1の局面による動作軌跡生成方法は、半導体基板を保持するハンドが取り付けられる水平多関節型のロボットアームを含む基板搬送ロボットの動作軌跡を生成する動作軌跡生成方法であって、ロボットアームおよび半導体基板が配置される配置領域の入力を受け付けることと、配置領域において、ハンドがアクセスする3つ以上のアクセスポイントの入力を受け付けることと、3つ以上のアクセスポイント同士の全ての組み合わせについて、半導体基板の搬送に要する時間を含む所定の条件に基づいて最適化された動作軌跡をシミュレーションにより算出することと、を備える。
【0007】
この開示の第1の局面による動作軌跡生成方法は、上記のように、配置領域において、ハンドがアクセスする3つ以上のアクセスポイントの入力を受け付けることと、3つ以上のアクセスポイント同士の全ての組み合わせについて、半導体基板の搬送に要する時間を含む所定の条件に基づいて最適化された動作軌跡をシミュレーションにより算出することと、を備える。これにより、ユーザが3つ以上のアクセスポイントを設定するだけで、3つ以上のアクセスポイント同士の全ての組み合わせについて、自動的に最適化された動作軌跡が算出されるので、3つ以上のアクセスポイント同士の全ての組み合わせの数の分、始点と終点とを設定する必要がない。このため、アクセスポイントが3つ以上ある場合でも、動作軌跡を生成するためのユーザの負担が大きくなることを抑制できる。
【0008】
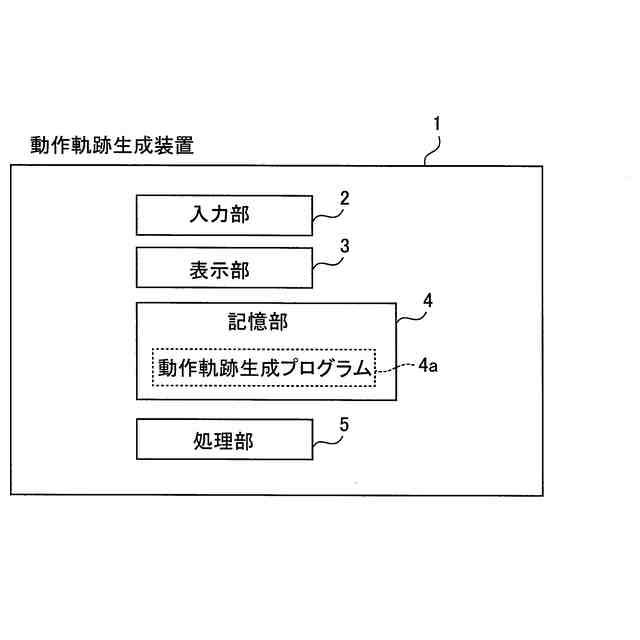
この開示の第2の局面による動作軌跡生成装置は、半導体基板を保持するハンドが取り付けられる水平多関節型のロボットアームを含む基板搬送ロボットの動作軌跡を生成する動作軌跡生成装置であって、ロボットアームおよび半導体基板が配置される配置領域と、配置領域において、ハンドがアクセスする3つ以上のアクセスポイントと、を入力するための入力部と、入力部に入力された配置領域を受け付ける処理と、入力部に入力された3つ以上のアクセスポイントを受け付ける処理と、3つ以上のアクセスポイント同士の全ての組み合わせについて、半導体基板の搬送に要する時間を含む所定の条件に基づいて最適化された動作軌跡をシミュレーションにより算出する処理と、を実行する処理部と、を備える。
【0009】
この開示の第2の局面による動作軌跡生成装置は、上記のように、入力部に入力された3つ以上のアクセスポイントの設定を受け付ける処理と、3つ以上のアクセスポイント同士の全ての組み合わせについて、半導体基板の搬送に要する時間を含む所定の条件に基づいて最適化された動作軌跡をシミュレーションにより算出する処理と、を実行する処理部を備える。これにより、ユーザが3つ以上のアクセスポイントを設定するだけで、3つ以上のアクセスポイント同士の全ての組み合わせについて、自動的に最適化された動作軌跡が算出されるので、3つ以上のアクセスポイント同士の全ての組み合わせの数の分、始点と終点とを設定する必要がない。このため、アクセスポイントが3つ以上ある場合でも、動作軌跡を生成するためのユーザの負担が大きくなることを抑制が可能な動作軌跡生成装置を提供できる。
【発明の効果】
【0010】
本開示の動作軌跡生成方法および動作軌跡生成装置によれば、アクセスポイントが3つ以上ある場合でも、動作軌跡を生成するためのユーザの負担が大きくなることを抑制できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
21日前
株式会社クレスコ
補助吸着具
14日前
株式会社不二越
ロボット
6日前
株式会社エビス
腰ベルト用連結具
21日前
個人
深孔スリーブ駆動ロッド構造
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
29日前
株式会社イノウ
給油口キャップ用開閉具
7日前
住友重機械工業株式会社
ロボット
今日
梅馨堂合同会社
人協働ロボットシステム
1か月前
川崎重工業株式会社
制動システム
6日前
株式会社不二越
垂直多関節ロボット
7日前
アイホン株式会社
ネジ締めカウントシステム
8日前
パナソニック株式会社
工具
7日前
株式会社デンソーウェーブ
ロボット制御システム
27日前
パナソニック株式会社
工具
7日前
学校法人法政大学
装着型アシスト装置
1か月前
アピュアン株式会社
エアー式衝撃工具
24日前
住友重機械工業株式会社
ロボット及びカバー
今日
三菱電機株式会社
トルク締め個所検出システム
1か月前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
今日
株式会社マキタ
打ち込み工具
8日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
22日前
株式会社マキタ
インパクト工具
22日前
SB C&S株式会社
治具セット
21日前
中国電力株式会社
電動ドライバー
28日前
株式会社不二越
ロボットの教示システム及び教示方法
28日前
JUKI株式会社
ハンドリング装置
1か月前
オムロン株式会社
モバイルロボット
28日前
オムロン株式会社
モバイルロボット
28日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
24日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
28日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
28日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
28日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ