TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025039433
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023146524
出願日
2023-09-08
発明の名称
ロボット可搬装置を有する自律走行搬送システム
出願人
株式会社バイナス
代理人
個人
主分類
B25J
5/00 20060101AFI20250313BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークを上下動するのに省エネルギーを図るロボット可搬装置を有する自律走行搬送システムを得ること。
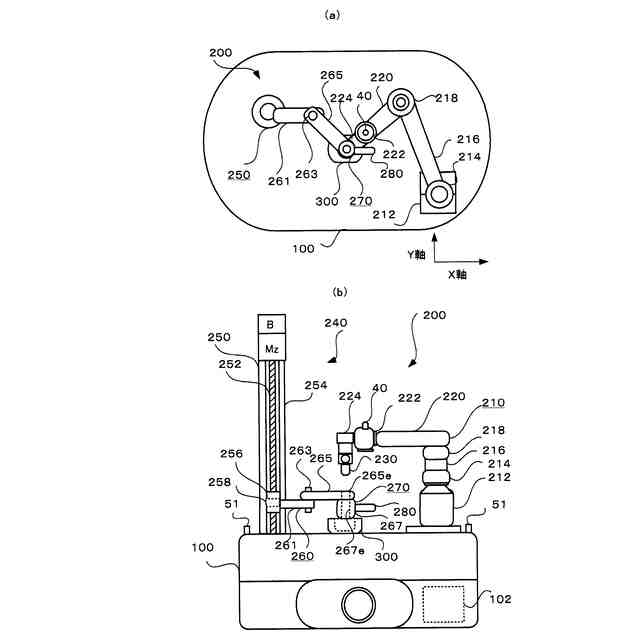
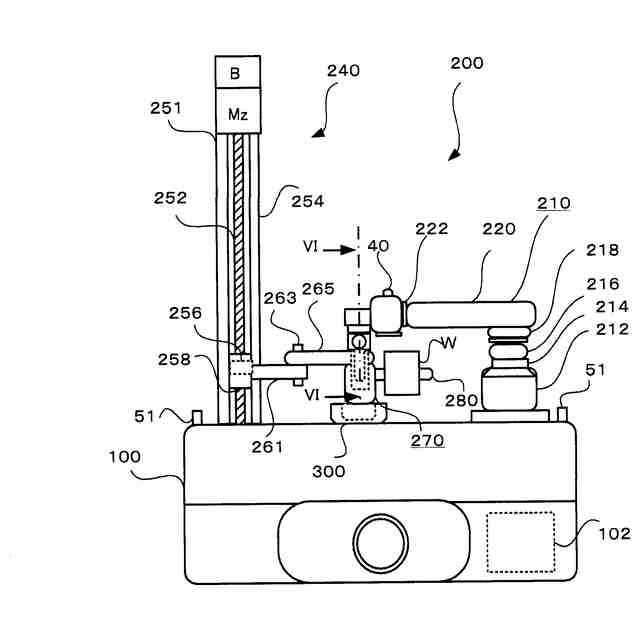
【解決手段】自律走行搬送システム1は自律走行搬送体100に設置され、第1及び第2のアーム、関節部を有し、手首部224に連結された被連結部材230を有し、手首部224を走行床面と平行、垂直に移動するマニピュレータ210と、ボールねじ252をモータMzにより移動するテーブル256を有する電動アクチュエータ250を備え、テーブル258に固定された第1、第2のリンク部材261、265とを有し、ワークWを上下に可搬可能な上下動可搬機240と、第2のリンク部材265に第1の連結孔265eが設けられ、第2の連結孔267eを有する柱部材267を有し、被連結部材230が第1及び第2の連結孔265e、連結孔267eに遊挿されるものである。
【選択図】図4
特許請求の範囲
【請求項1】
蓄電池を有し、自律走行する自律走行搬送体を備え、前記自律走行搬送体の走行床面とワークを垂直となるZ軸方向に上下動すると共に、前記自律走行搬送体の走行床面と水平となるX軸、Y軸方向に移動して、前記ワークを取得及び格納するロボット可搬装置を有する自律走行搬送システムであって、
前記ロボット可搬装置は、前記自律走行搬送体に基台が設置され、この基台に連結されると共に、第1の旋回、第1の上下動が可能な第1の関節部を介して設けられた第1のアームを有し、前記第1のアームに連結されると共に、第2の上下動が可能な第2の関節部を介して設けられた第2のアームを有し、この第2のアームの先端部が第3の旋回、第3の上下動が可能な第3の関節部を介して設けられた手首部を有し、この手首部に連結される柱状の被連結部材を有し、前記手首部を前記X軸、Y軸方向に移動すると共に、前記Z軸方向に上下動する垂直多関節型のマニピュレータと、
前記自律走行搬送体に設置されると共に、前記基台と対向して配置され、ナットに螺合されたボールねじをモータにより回転してZ軸方向に移動する前記ナットに連結固定されたテーブルを有する、立設された電動アクチュエータを備え、前記テーブルに連結固定された第1のリンク部材と、この第1のリンク部材とリンク機構を成す第2のリンク部材とを有し、前記第2のリンク部材の先端部が前記X軸、Y軸方向に移動可能で、前記ワークを前記Z軸方向に可搬可能に形成されている上下動可搬手段と、
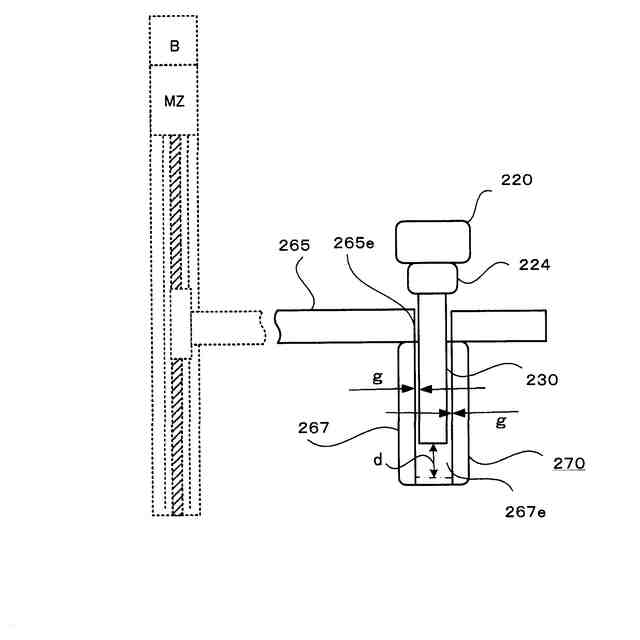
前記第2のリンク部材の先端部に第1の連結孔が設けられ、前記先端部の下面に固定されると共に、前記第1の連結孔と連通した第2の連結孔を有する柱状の柱部材を有し、前記被連結部材が前記第1及び第2の連結孔に遊挿されると共に、前記被連結部材が前記第2の連結孔内で移動可能に前記第2のリンク部材と連結される連結手段と、
前記連結手段に連結され、前記ワークを取得及び格納するワーク取得手段と、
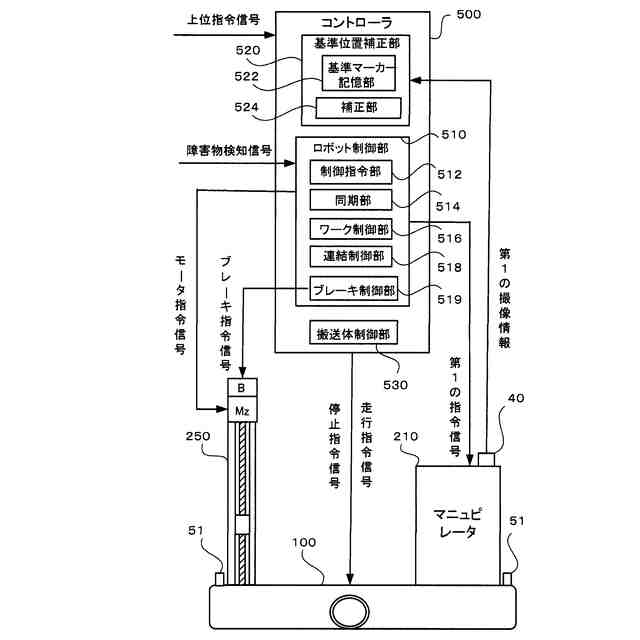
前記第1から第3の関節部を駆動して前記手首部を前記X軸、Y軸、Z軸に移動するX軸、Y軸、Z軸指令信号を有する第1の指令信号を発生すると共に、前記モータを駆動する第2の指令信号を発生する制御手段と、
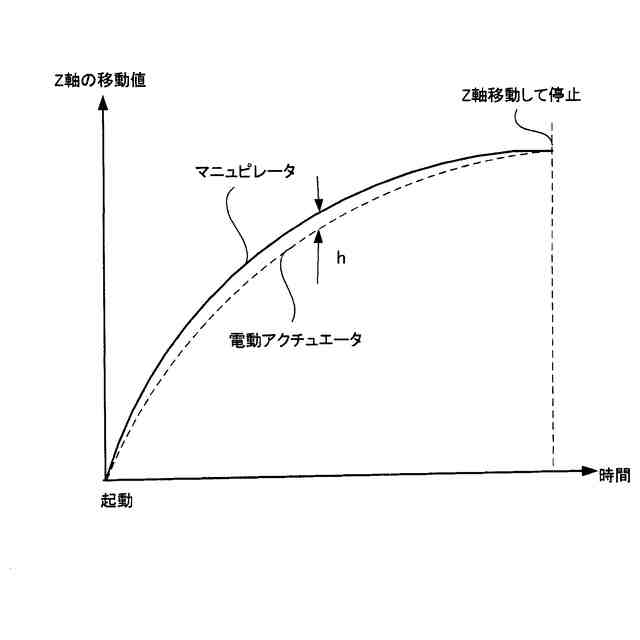
前記Z軸指令信号と前記第2の指令信号とを同期させる同期手段と、
を備えたことを特徴とするロボット可搬装置を有する自律走行搬送システム。
続きを表示(約 1,400 文字)
【請求項2】
前記ワークを前記上下動可搬手段が取得した状態で、前記同期手段により前記Z軸指令信号と前記第2の指令信号とを同期して前記上下動可搬手段と前記マニピュレータとを前記Z軸方向に移動する過程において、
前記被連結部材が前記第1及び第2の連結孔内を移動する移動値が前記上下動可搬手段と前記マニピュレータとのZ軸方向の移動量の差値よりも大きい、
ことを特徴とする請求項1に記載のロボット可搬装置を有する自律走行搬送システム。
【請求項3】
前記自律走行搬送体の上面に連結固定されると共に、前記柱部材を載せる凹部を有する台部材と、
前記柱部材の底面を前記台部材の凹部に載せた状態において、
前記制御手段は、さらに、前記被連結部材を前記第1及び第2の連結孔に挿入する連結指令信号を発生する、
ことを特徴とする請求項1又は2に記載のロボット可搬装置を有する自律走行搬送システム。
【請求項4】
前記モータを拘束及び解放するブレーキ手段を備え、
前記ワーク取得手段により保管装置に保管された前記ワークを取得するワーク取得工程と、
前記ワーク取得工程を実行した後、前記マニピュレータ及び前記上下動可搬手段を動作して前記柱部材の底面を前記台部材に載せるワーク載置工程と、
前記ワーク載置工程を実行した後、前記ブレーキ手段により前記モータを拘束するモータ拘束工程と、
前記モータ拘束工程を実行した後、前記自立走行搬送体を走行するワーク搬送工程を実行する、
ことを特徴とする請求項1又は2に記載のロボット可搬装置を有する自律走行搬送システムの動作方法。
【請求項5】
前記リンク機構の前記X軸、Y軸から成る第1の可動領域が前記マニピュレータの前記X軸、Y軸から成る第2の可動領域よりも狭い、
ことを特徴とする請求項1又は2に記載のロボット可搬装置を有する自律走行搬送システム。
【請求項6】
前記自律走行搬送体には、障害物が予め定められた警告領域に存在することを検知して障害物検知信号を発生する障害物検出手段を備え、
前記制御手段は、さらに、前記障害物検知信号に基づいて前記自律走行搬送体及び前記ロボット可搬装置を緊急停止する緊急停止指令信号を発生する、
ことを特徴とする請求項請求項1又は2に記載のロボット可搬装置を有する自律走行搬送システム。
【請求項7】
前記自律走行搬送体は、前記ワークを保管装置から取得してから前記ワークを格納装置に移動する経路をたどり、
前記保管装置、前記格納装置のいずれか一つには、基準マーカーを有しており、
前記基準マーカーを第1の撮像情報として記憶する記憶手段と、
前記マニピュレータに連結固定されると共に、前記基準マーカーを撮像して第2の撮像情報を得る撮像手段と、
前記記憶手段から読み出した前記第1の撮像情報と前記第2の撮像情報との差分を求め、前記差分に基づいて前記自律走行搬送体の基準位置を補正する補正手段とを備え.
前記制御手段は、さらに、前記被連結部材を前記第1及び第2の連結孔に挿入された連結した状態から前記被連結部材を前記第1及び第2の連結孔から引き出す連結解除指令信号を発生する、
ことを特徴とする請求項1又は2に記載のロボット可搬装置を有する自律走行搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット可搬装置を有する自律走行搬送システムに関するもので、走行方式は、AGV(Automatic Guided Vehicle)、AMR(Autonomous Mobile Robot)のいずれも含むものである。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
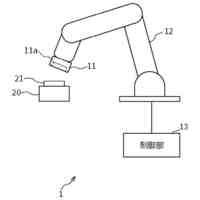
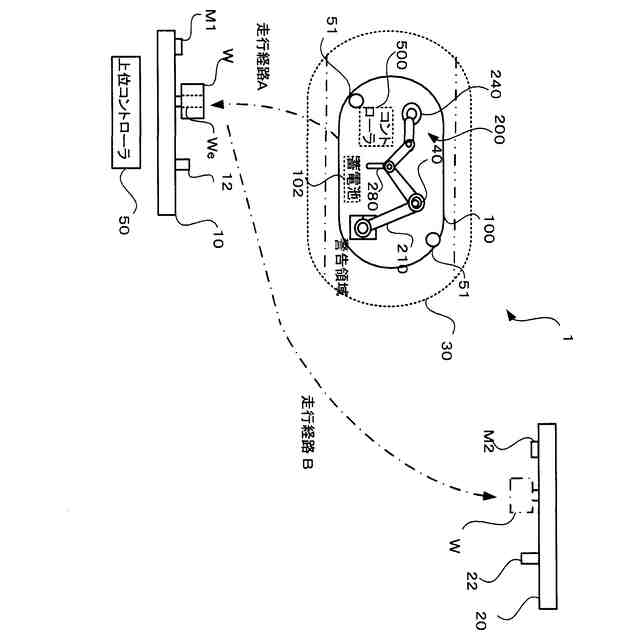
マニピュレータを有する自律走行搬送システムは、軌道レールを持たずに走行し、ワークを搬送する。ワークが保管台に保管されており、マニピュレータによりワークを取得して、このワークを保持しながら自律走行搬送体によって格納台まで移動し、ワークを格納台に格納する。
【0003】
このようなマニピュレータを有する自律走行搬送システムとして下記特許文献1が知られている。特許文献1に記載の自律走行搬送体に設置されたマニピュレータは、水平関節型で、ワークを把持するハンド部と、このハンド部を支えワークの方向設定する手首部と、この手首部を自立走行搬送体の走行床面と平行に移動するアームと、このアームを走行床面と垂直に上下動させる上下駆動部を有している。このように構成したマニピュレータを有する搬送システムによれば、自律走行搬送体に設けられたマニピュレータのアームがワークを水平の位置に移動し、上下駆動部がワークを垂直に上下動することにより、ワークを搬送移動できる。
【先行技術文献】
【特許文献】
【0004】
特開昭63-237880号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、人の搬送業務を代替する自律走行搬送システムは、人と協働することを念頭に開発されている。蓄電池を有する自律走行搬送体に搭載されるマニピュレータは、動作範囲の制限と、上記蓄電池の容量などから小型化を図り省電力化することが求められる。この解決手段として単に、マニピュレータを小型化すると、ワークの可搬能力が低下してワークを上下動させることが困難となり得る。一方、マニピュレータを大型化してワークの上下動の可搬能力を増大すると、駆動電力の増加をもたらして上記蓄電池の容量を越えたり、蓄電池が大型になったりする。上記特許文献1の自律走行搬送体の水平関節型のマニピュレータは、上下駆動部が第1の関節部を介して設けられた第1のアームを有し、第1のアームの先端部に設けられた第2の関節部を介して設けられた第2のアームを有し、第3の関節部を介してワークを把持する手首部と、この手首部を支えワークの方向を設定する手首部と、この手首部を搬送装置の床面と平行に移動する第1及び第2のアームとを備えている。発明者は、水平関節型のマニピュレータでは第1及び第2のアーム、第1から第3の関節部などの自重と、ワークの荷重とを上下動する上下駆動部が大型化すると共に、ワークを単に上下動させる機能に比較して駆動エネルギーが増大することを見出した。
【0006】
この解決手段として、ワークを上下動させる第1の機能と、ワークを持ち上げることなく手首部を搬送装置の走行床面と平行にX,Y軸上、垂直にZ軸上に移動する第2の機能とに分離すると共に、一つのロボット可搬装置として動作させるという着想を得た。具体的には、ロボット可搬装置は第1の機能を担うために、直動運動が得意な電動アクチュエータをワークの上下動可搬に用い、さらに、第2の機能を担うために、X,Y,Z軸上に移動する際に、Z軸方向の上下動では、手首部、アームなどの自重を上下動させるのみで、ワークの上下動の可搬には関与しないマニピュレータに分離して形成するとの考えに至った。
【0007】
しかし、単に、第1の機能を電動アクチュエータ、第2の機能をマニピュレータに分担させるだけでは、ワークをZ軸方向に上下動すると共に、自律走行搬送体の走行床面と水平となるX軸、Y軸方向にワークを移動することは困難であるという新たな課題に直面したのである。
【0008】
本発明は、上記のような課題を解決するためになされたもので、ワークを上下動に移動する第1の機能を電動アクチュエータに担わせ、マニュピレータの手首部がワークを上昇することなく、自律走行搬送体の走行床面と平行にX,Y、垂直にZ軸上に移動する第2の機能をマニュピレータに担わせ、電動アクチュエータにより垂直移動するテーブルと、マニピュレータの手首部の先端部と、を連結したロボット可搬装置を有する自律走行搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
第1の発明に係るロボット可搬装置を有する自律走行搬送システムは、蓄電池を有し、自律走行する自律走行搬送体を備え、前記自律走行搬送体の走行床面とワークを垂直となるZ軸方向に上下動すると共に、前記自律走行搬送体の走行床面と水平となるX軸、Y軸方向に移動して、前記ワークを取得及び格納するロボット可搬装置を有する自律走行搬送システムであって、
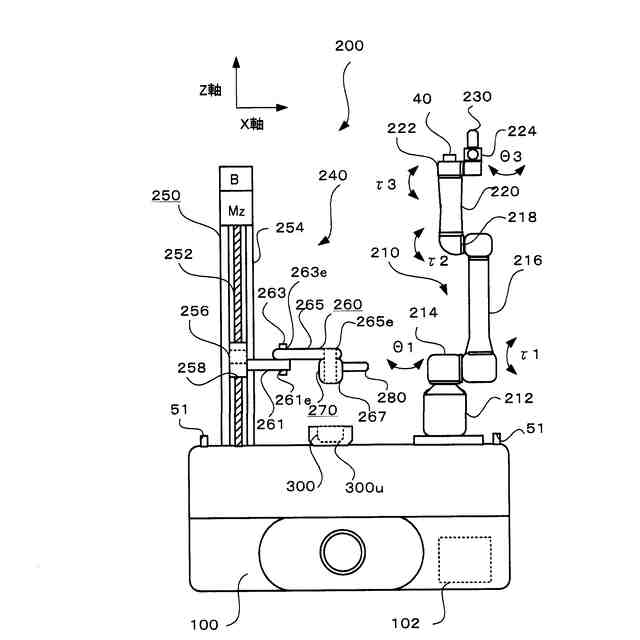
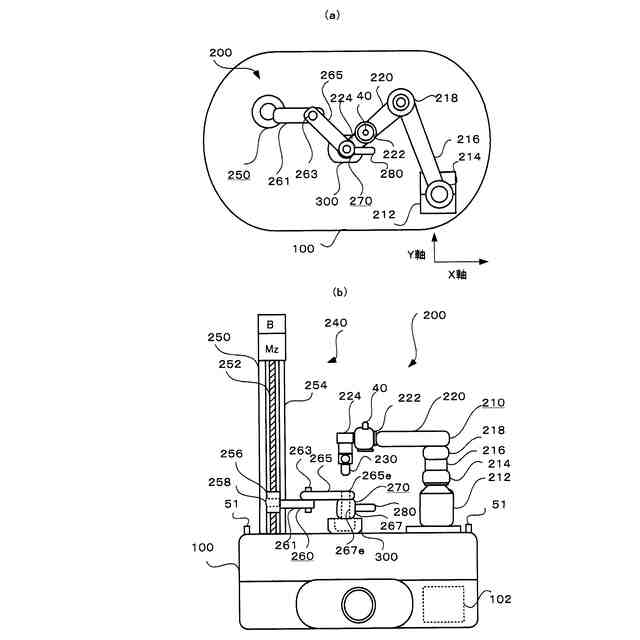
前記ロボット可搬装置は、前記自律走行搬送体に基台が設置され、この基台に連結されると共に、第1の旋回、第1の上下動が可能な第1の関節部を介して設けられた第1のアームを有し、前記第1のアームに連結されると共に、第2の上下動が可能な第2の関節部を介して設けられた第2のアームを有し、この第2のアームの先端部が第3の旋回、第3の上下動が可能な第3の関節部を介して設けられた手首部を有し、この手首部に連結される柱状の被連結部材を有し、前記手首部を前記X軸、Y軸方向に移動すると共に、前記Z軸方向に上下動する垂直多関節型のマニピュレータと、
前記自律走行搬送体に設置されると共に、前記基台と対向して配置され、ナットに螺合されたボールねじをモータにより回転してZ軸方向に移動する前記ナットに連結固定されたテーブルを有する、立設された電動アクチュエータを備え、前記テーブルに連結固定された第1のリンク部材と、この第1のリンク部材とリンク機構を成す第2のリンク部材とを有し、前記第2のリンク部材の先端部が前記X軸、Y軸方向に移動可能で、前記ワークを前記Z軸方向に可搬可能に形成されている上下動可搬手段と、
前記第2のリンク部材の先端部に第1の連結孔が設けられ、前記先端部の下面に固定されると共に、前記第1の連結孔と連通した第2の連結孔を有する柱状の柱部材を有し、前記被連結部材が前記第1及び第2の連結孔に遊挿されると共に、前記被連結部材が前記第2の連結孔内で移動可能に前記第2のリンク部材と連結される連結手段と、
前記連結手段に連結され、前記ワークを取得及び格納するワーク取得手段と、
前記第1から第3の関節部を駆動して前記手首部を前記X軸、Y軸、Z軸に移動するX軸、Y軸、Z軸指令信号を有する第1の指令信号を発生すると共に、前記モータを駆動する第2の指令信号を発生する制御手段と、
前記Z軸指令信号と前記第2の指令信号とを同期させる同期手段と、を備えたことを特徴とするものである。
ここで、自律走行搬送体の走行方式は、AGV(Automatic Guided Vehicle)、AMR(Autonomous Mobile Robot)のいずれも含むものである。
【0010】
このようなロボット可搬装置を有する自律走行搬送システムによれば、垂直多関節型のマニピュレータは、自律走行搬送体に基台が設置され、この基台に連結されると共に、第1の旋回、第1の上下動が可能な第1の関節部を介して設けられた第1のアームを有し、第1のアームに連結されると共に、第2の上下動が可能な第2の関節部を介して設けられた第2のアームを有し、この第2のアームの先端部が第3の旋回、第3の上下動が可能な第3の関節部を介して設けられた手首部を有し、この手首部に連結される柱状の被連結部材を有し、手首部をX軸、Y軸方向に移動すると共に、Z軸方向に上下動する。
上下動可搬手段は、自律走行搬送体に設置されると共に、基台と対向して配置され、ナットに螺合されたボールねじをモータにより回転してZ軸方向に移動するナットに連結固定されたテーブルを有する、立設された電動アクチュエータを備え、テーブルに連結固定された第1のリンク部材と、この第1のリンク部材とリンク機構を成す第2のリンク部材とを有し、第2のリンク部材の先端部がX軸、Y軸方向に移動可能で、ワークをZ軸方向に可搬可能となる。
連結手段は、第2のリンク部材の先端部に第1の連結孔が設けられ、先端部の下面に固定されると共に、第1の連結孔と連通した第2の連結孔を有する柱状の柱部材を有し、被連結部材が前記第1及び第2の連結孔に遊挿されると共に、被連結部材が前記第1及び第2の連結孔内で移動可能に第2のリンク部材と連結している。ワーク取得手段は連結手段に連結され、ワークを取得及び格納する。制御手段は、第1から第3の関節部を駆動して手首部をX軸、Y軸、Z軸を移動するX軸、Y軸、Z軸指令信号を有する第1の指令信号を発生すると共に、モータを駆動する第2の指令信号を発生する。同期手段がZ軸の指令信号と第2の指令信号と同期する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
16日前
株式会社アイセイ
搬送装置
22日前
個人
けがき用治具
10日前
国立大学法人金沢大学
ロボット
28日前
株式会社不二越
ロボット
8日前
個人
深孔スリーブ駆動ロッド構造
今日
株式会社不二越
ロボット操作装置
7日前
川崎重工業株式会社
ロボット
8日前
株式会社ケー・エフ・シー
締結構造
1か月前
株式会社デンソー
操縦桿
8日前
株式会社黒澤鉄工製作所
けがき用治具
10日前
川崎重工業株式会社
ロボットシステム
16日前
個人
バール
今日
梅馨堂合同会社
人協働ロボットシステム
2日前
株式会社不二越
基板搬送用ロボット
17日前
アピュアン株式会社
衝撃工具
23日前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
ARMA株式会社
UI付エンドエフェクタ
3日前
株式会社マキタ
集塵アタッチメント
1か月前
株式会社コスメック
把持装置
29日前
国立大学法人 東京大学
ロボットアーム
29日前
株式会社ダイヘン
ロボット制御システム
1か月前
原利興工業有限公司
工具用スリーブ
28日前
株式会社不二越
ロボットビジョンシステム
1か月前
株式会社マキタ
電動工具
22日前
株式会社マキタ
電動工具
22日前
株式会社マキタ
作業機
28日前
株式会社マキタ
作業機
28日前
株式会社マキタ
電動工具
22日前
株式会社マキタ
作業機
7日前
株式会社マキタ
作業機
28日前
株式会社マキタ
電動工具
22日前
株式会社マキタ
電動工具
22日前
若井ホールディングス株式会社
レンチ構造とその製造方法
10日前
三菱電機株式会社
トルク締め個所検出システム
今日
株式会社マキタ
打ち込み工具
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ