TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025050532
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023159382
出願日
2023-09-25
発明の名称
指令値送信装置、制御システム、及び、指令値送信方法
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
9/10 20060101AFI20250328BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットコントローラの外部で生成される指令値の生成タイミングが遅れたり早まったりした場合であっても、その影響を打ち消して適切な指令値を生成して送信する指令値送信装置を提供する。
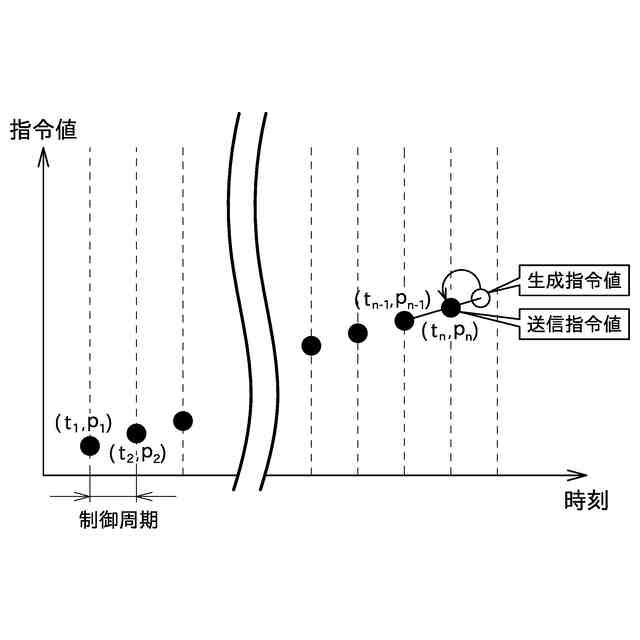
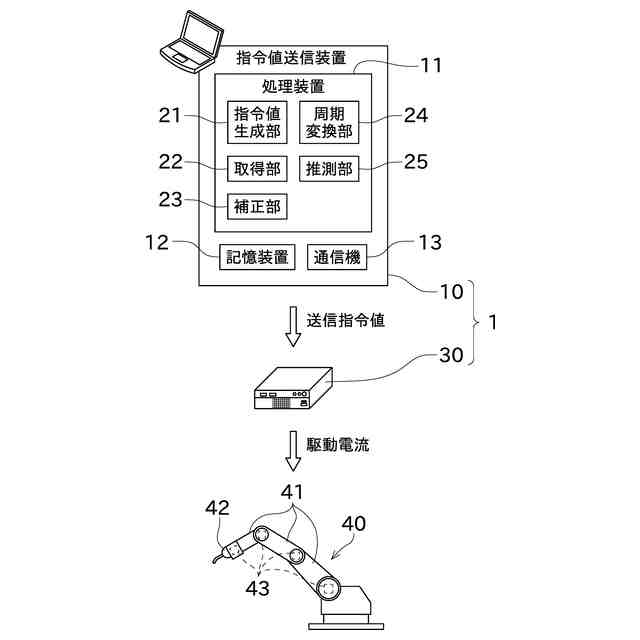
【解決手段】指令値送信装置は、取得部と、補正部と、通信機と、を備える。取得部は、指令値生成ソフトウェアを用いて生成されたn番目の生成指令値と、n番目の生成指令値の生成時刻と、を取得する。補正部は、n番目の生成時刻の遅れ又は早まりの程度と、n番目の生成指令値とn-1番目以前の送信指令値に基づく指令値の変化傾向と、に基づいて、n番目の生成指令値を補正してn番目の送信指令値を生成する。通信機は、制御周期で送信指令値をロボットコントローラに送信する。
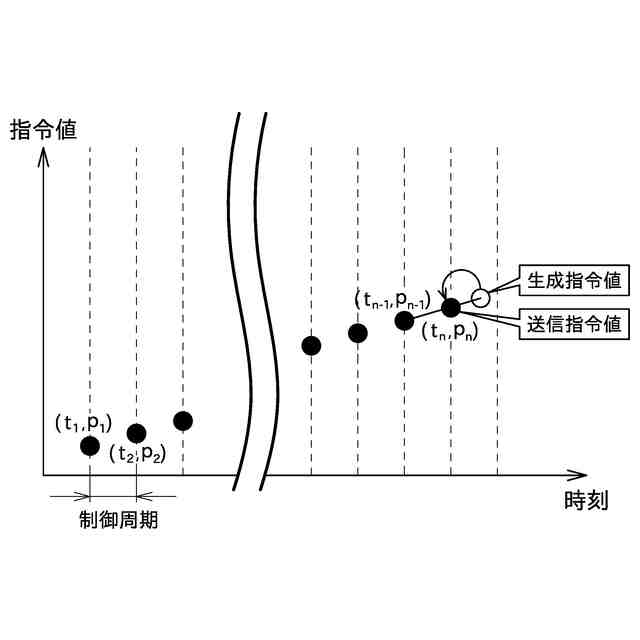
【選択図】図4
特許請求の範囲
【請求項1】
ロボットを制御するロボットコントローラに対して、予め定められた制御周期で送信指令値を送信する指令値送信装置において、
指令値生成ソフトウェアを用いて生成されたn番目の生成指令値と、n番目の前記生成指令値の生成時刻と、を取得する取得部と、
n番目の前記生成時刻の遅れ又は早まりの程度と、n番目の前記生成指令値とn-1番目以前の前記送信指令値に基づく指令値の変化傾向と、に基づいて、n番目の前記生成指令値を補正してn番目の前記送信指令値を生成する補正部と、
前記制御周期で前記送信指令値を前記ロボットコントローラに送信する通信機と、
を備える、指令値送信装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の指令値送信装置であって、
前記補正部は、n番目の前記生成指令値とn-1番目の前記送信指令値を用いた線形補間によりn番目の前記生成指令値を補正して、n番目の前記送信指令値を生成する、指令値送信装置。
【請求項3】
請求項1に記載の指令値送信装置であって、
前記生成時刻から、n-1番目の前記送信指令値に対応する時刻を減算した時間差が第1閾値を超えた場合、又は、n番目の前記送信指令値から、n-1番目の前記送信指令値を減算した指令値差が第2閾値を超えた場合、前記ロボットの動作を停止する処理を行う、指令値送信装置。
【請求項4】
請求項3に記載の指令値送信装置であって、
前記送信指令値をバッファリングする記憶装置を備え、
前記記憶装置がバッファリング可能な前記送信指令値の個数に前記制御周期を積算した値に基づく前記第1閾値が設定される、指令値送信装置。
【請求項5】
請求項1に記載の指令値送信装置であって、
周期変換部を備え、
前記指令値生成ソフトウェアの前記生成指令値の生成周期と、前記制御周期と、が異なる場合において、
前記周期変換部は、前記送信指令値の補間処理又は外挿処理を行って新たな前記送信指令値を生成するか、又は、前記送信指令値の間引きを行うことにより、前記制御周期に応じた前記送信指令値を準備し、
前記通信機は、前記周期変換部が準備した前記送信指令値を、前記制御周期に応じて前記ロボットコントローラへ送信する、指令値送信装置。
【請求項6】
請求項1に記載の指令値送信装置であって、
推測部を備え、
予め定められた時間を超えて前記指令値生成ソフトウェアから前記生成指令値を取得できなかった場合において、
前記推測部は、過去の前記送信指令値に基づいて補間処理又は外挿処理を行って推測指令値を生成し、
前記通信機は、前記推測部が生成した前記推測指令値を前記制御周期に応じて前記ロボットコントローラへ送信する、指令値送信装置。
【請求項7】
請求項6に記載の指令値送信装置であって、
前記推測部は、前記送信指令値と前記推測指令値のうち、前記送信指令値のみを用いて、前記補間処理又は前記外挿処理を行う、指令値送信装置。
【請求項8】
請求項1に記載の指令値送信装置と、
前記送信指令値に基づいて、前記ロボットのモータを動作させる駆動電流を生成して出力する前記ロボットコントローラと、
を備え、
前記指令値生成ソフトウェアは、汎用プログラミング言語で作成されたオープンソースソフトウェアであり、
前記ロボットコントローラは、前記汎用プログラミング言語とは異なるプログラミング言語であって、かつ、前記ロボットの動作に関する専用のプログラミング言語を用いて前記駆動電流を生成する、制御システム。
【請求項9】
ロボットを制御するロボットコントローラに対して、予め定められた制御周期で送信指令値を送信する指令値送信方法において、
指令値生成ソフトウェアを用いて生成されたn番目の生成指令値と、n番目の前記生成指令値の生成時刻と、を取得し、
n番目の前記生成時刻の遅れ又は早まりの程度と、n番目の前記生成指令値とn-1番目以前の前記送信指令値に基づく指令値の変化傾向と、に基づいて、n番目の前記生成指令値を補正してn番目の前記送信指令値を生成し、
前記制御周期で前記送信指令値を前記ロボットコントローラに送信する、指令値送信方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、主として、ロボットコントローラに送信する指令値を補正して送信する指令値送信装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、ロボットを制御するための制御システムを開示する。制御システムは、制御装置と、ロボットコントローラと、を備える。制御装置は、ロボットの軌道に関する命令をロボットコントローラへ送信する。ロボットコントローラは、受信した命令に基づいて、ロボットを動作させる指令値を生成し、ロボットに送信する。制御装置は、上述した命令に加えて、ロボットの軌道に関する補正量を周期的に送信する。ロボットコントローラは、受信した補正量に基づいて補正後の指令値を計算する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2022/162959号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の制御システムでは、何らかの事情で、制御装置が命令を生成するタイミングが遅れたり早まったりする可能性がある。この命令に基づいて指令値を生成する場合、指令値の変化量が予め想定した値を超えることがあり、ロボットの動作が停止される可能性がある。
【0005】
本開示は以上の事情に鑑みてされたものであり、その主要な目的は、ロボットコントローラの外部で生成される指令値の生成タイミングが遅れたり早まったりした場合であっても、その影響を打ち消して適切な指令値を生成して送信する指令値送信装置を提供することにある。
【課題を解決するための手段】
【0006】
本開示の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0007】
本開示の第1の観点によれば、以下の構成の指令値送信装置が提供される。即ち、指令値送信装置は、ロボットを制御するロボットコントローラに対して、予め定められた制御周期で送信指令値を送信する。指令値送信装置は、取得部と、補正部と、通信機と、を備える。前記取得部は、指令値生成ソフトウェアを用いて生成されたn番目の生成指令値と、n番目の前記生成指令値の生成時刻と、を取得する。前記補正部は、n番目の前記生成時刻の遅れ又は早まりの程度と、n番目の前記生成指令値とn-1番目以前の前記送信指令値に基づく指令値の変化傾向と、に基づいて、n番目の前記生成指令値を補正してn番目の前記送信指令値を生成する。前記通信機は、前記制御周期で前記送信指令値を前記ロボットコントローラに送信する。
【0008】
本開示の第2の観点によれば、以下の指令値送信方法が提供される。即ち、指令値送信方法では、ロボットを制御するロボットコントローラに対して、予め定められた制御周期で送信指令値を送信する。指令値送信方法では、指令値生成ソフトウェアを用いて生成されたn番目の生成指令値と、n番目の前記生成指令値の生成時刻と、を取得する。指令値送信方法では、n番目の前記生成時刻の遅れ又は早まりの程度と、n番目の前記生成指令値とn-1番目以前の前記送信指令値に基づく指令値の変化傾向と、に基づいて、n番目の前記生成指令値を補正してn番目の前記送信指令値を生成する。指令値送信方法では、前記制御周期で前記送信指令値を前記ロボットコントローラに送信する。
【発明の効果】
【0009】
本開示によれば、ロボットコントローラの外部で生成される指令値の生成タイミングが遅れたり早まったりした場合であっても、その影響を打ち消して適切な指令値を生成して送信できる。
【図面の簡単な説明】
【0010】
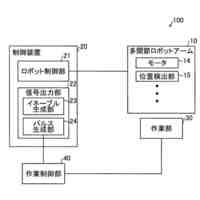
制御システム及びロボットのブロック図。
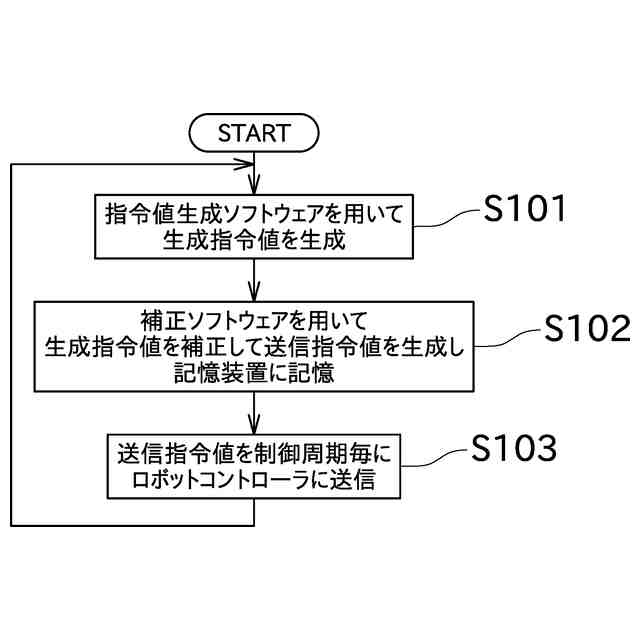
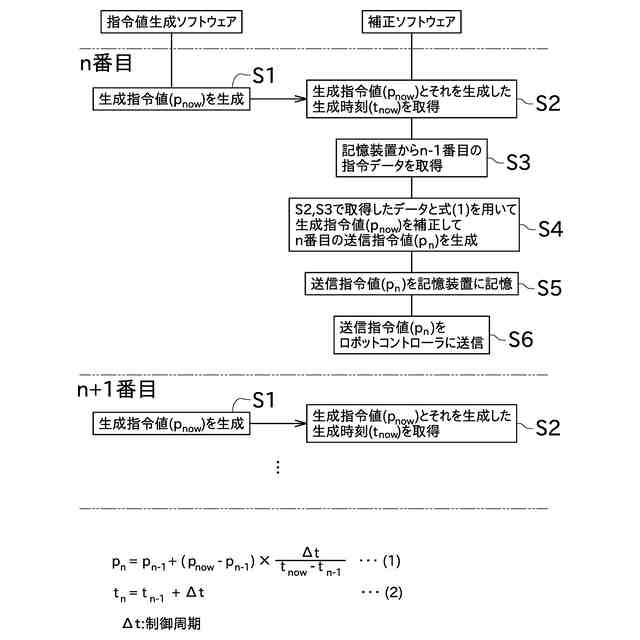
指令値送信装置のフローチャート。
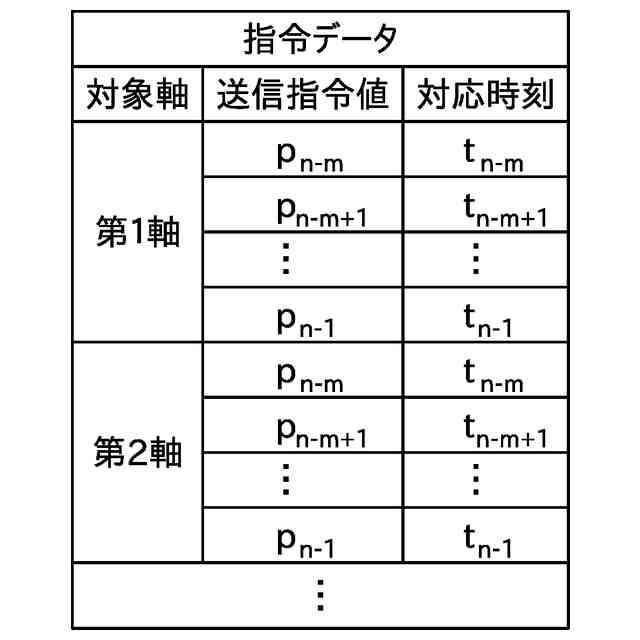
指令値送信装置の記憶装置に記憶される指令データを示す表。
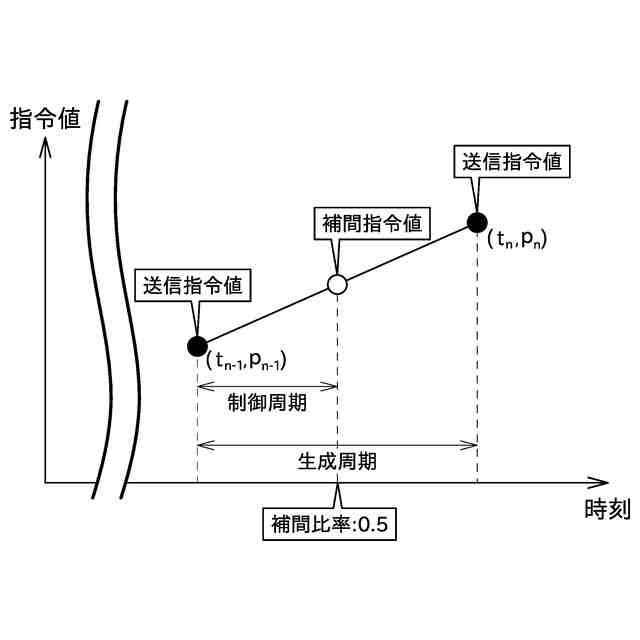
補正機能を説明するためのグラフ。
指令値送信装置の指令値生成ソフトウェアと補正ソフトウェアのシーケンス図。
周期変換機能を説明するためのグラフ。
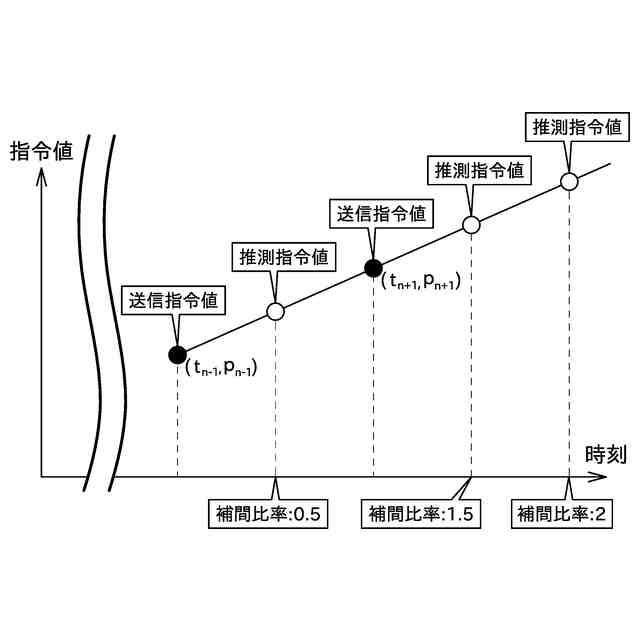
推測機能を説明するためのグラフ。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
水素航空機
2日前
川崎重工業株式会社
低温流体の移送システム
3日前
川崎重工業株式会社
搬送システム、搬送物の搬送方法、および、ロボット
3日前
川崎重工業株式会社
ロボットシステム、ロボット動作方法、および、ロボット
3日前
川崎重工業株式会社
液化水素移送システムおよびその中間移送設備、パージ方法
3日前
川崎重工業株式会社
グリス交換時期予測方法
5日前
川崎重工業株式会社
ロボットシステム、ロボットおよびロボットの動作方法
4日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
24日前
株式会社不二越
ロボット
1か月前
株式会社不二越
ロボット
16日前
個人
けがき用治具
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
株式会社不二越
ロボット操作装置
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
株式会社デンソー
操縦桿
1か月前
個人
バール
1か月前
株式会社イノウ
給油口キャップ用開閉具
17日前
株式会社アイエイアイ
グリッパー
5日前
川崎重工業株式会社
制動システム
16日前
庄内機械株式会社
釘打装置
3日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
住友重機械工業株式会社
ロボット
10日前
株式会社不二越
垂直多関節ロボット
17日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
トヨタ自動車東日本株式会社
搬送治具
3日前
アイホン株式会社
ネジ締めカウントシステム
18日前
芝浦機械株式会社
双腕ロボット
9日前
トヨタ自動車株式会社
荷姿影響緩和方法
6日前
パナソニック株式会社
工具
17日前
パナソニック株式会社
工具
17日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
株式会社マキタ
作業機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ