TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060204
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170785
出願日
2023-09-29
発明の名称
多関節ロボット、及びモバイルロボット
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
9/06 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】基部に旋回軸を備えることを前提として、旋回軸の方向に基部から離れた可変位置である第二リンクの先端側に操作の実質的な起点となる関節を配置可能にするとともに、関節の総数がなるべく少ない構造で、起点利用型物体操作ができるようにする。
【解決手段】多関節ロボットは、基部から離れた可変位置である第二リンクの先端側に操作の実質的な起点となる関節を設け、第二リンクの先端側の関節を含む第三リンク調節部に第三リンクを介し接続されるハンドを備え、第三リンク調節部は、直列に接続され回転軸の方向が互いに直交する少なくとも2つの関節を備え前記第三リンクの長さ方向を任意の方向に向けることができる。
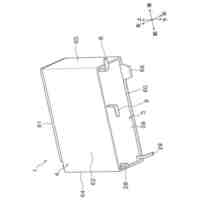
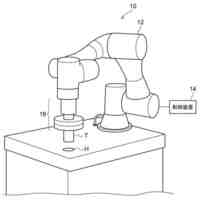
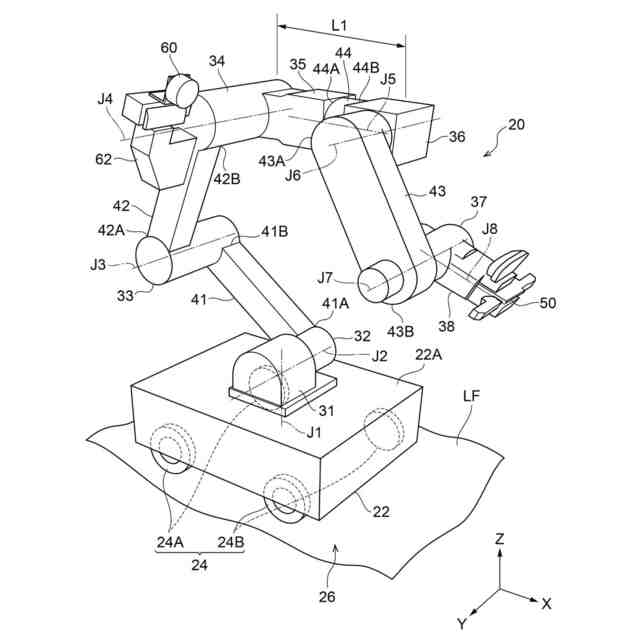
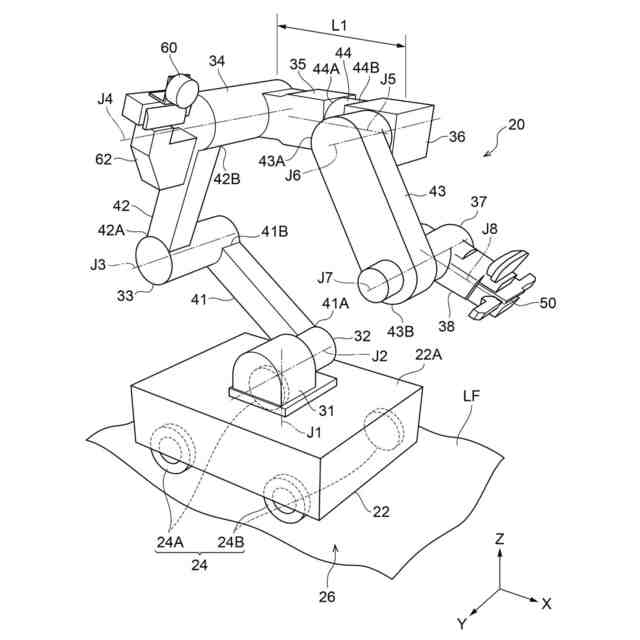
【選択図】図1
特許請求の範囲
【請求項1】
基部に接続され前記基部に対して特定の方向の第一回転軸を有する第一関節と、
前記第一関節に他の関節を介在させることなく接続され、前記第一回転軸に対して直交する方向の第二回転軸を有する第二関節と、
前記第二関節に一端が接続され、前記第二回転軸に対して垂直な方向に長さを有する第一リンクと、
前記第一リンクの他端に設けられ、前記第二回転軸と平行な第三回転軸を有する第三関節と、
前記第三関節に一端が接続され、前記第三回転軸に対して垂直な方向に長さを有する第二リンクと、
前記第二リンクの他端に設けられる第三リンク調節部と、
前記第三リンク調節部に一端が接続される第三リンクと、
前記第三リンク調節部に前記第三リンクを介して接続されるエンドエフェクタと、
を備え、
前記第三リンク調節部は、直列に接続され回転軸の方向が互いに直交する少なくとも2つの関節を備え、前記第三リンクの長さ方向を任意の方向に向けることができる、
多関節ロボット。
続きを表示(約 1,600 文字)
【請求項2】
前記第三リンク調節部は、前記第二リンクの長さ方向に対して直交し、かつ、前記第二回転軸及び前記第三回転軸に対して平行な方向又は直交する方向の第四回転軸を有する第四関節、前記第四関節と前記第三リンクとの間に設けられ前記第四回転軸に対して直交する方向の第五回転軸を有する第五関節及び前記第五関節と前記第三リンクとの間に設けられ前記第五回転軸に対して直交する方向の第六回転軸を有する第六関節を備え、
前記第四回転軸と前記第六回転軸とは、前記第五回転軸の方向に離隔し、
前記第三リンクの長さ方向は、前記第六回転軸に対して垂直な方向である、
請求項1に記載の多関節ロボット。
【請求項3】
前記第三リンク調節部は、前記第二リンクの長さ方向に対して平行な方向の第四回転軸又は前記第二リンクの長さ方向に対して直交し、かつ、前記第二回転軸及び前記第三回転軸に対して直交する方向の第四回転軸を有する第四関節、前記第四関節と前記第三リンクとの間に設けられ前記第四回転軸に対して直交する方向の第五回転軸を有する第五関節、前記第五関節に一端が接続され前記第五回転軸に対して垂直な方向に長さを有する第四リンク及び前記第四リンクの他端に設けられ前記第四リンクの長さ方向に対して直交し、かつ、前記第五回転軸に対して直交する方向の第六回転軸を有する第六関節を備え、
前記第三リンクの長さ方向は、前記第六回転軸に対して垂直な方向である、
請求項1に記載の多関節ロボット。
【請求項4】
前記第三リンク調節部は、前記第二リンクの長さ方向に対して平行な方向の第四回転軸又は第二リンクの長さ方向に対して直交し、かつ、前記第二回転軸及び前記第三回転軸に対して直交する方向の第四回転軸を有する第四関節及び前記第四関節と前記第三リンクとの間に設けられ前記第四回転軸に対して直交する方向の第五回転軸を有する第五関節を備え、
前記第三リンクの長さ方向は、前記第五回転軸に対して垂直な方向である、
請求項1に記載の多関節ロボット。
【請求項5】
前記第三リンクと前記エンドエフェクタとの間に設けられ、回転軸の方向が互いに直交する2つの関節をさらに備える請求項1に記載の多関節ロボット。
【請求項6】
前記第三リンク調節部が備える関節のうち前記第二リンクに最も近い位置に設けられた関節の近傍に撮像装置を備える請求項1に記載の多関節ロボット。
【請求項7】
前記撮像装置をチルト方向又はパン方向の少なくとも一方向に回転可能に支持する架台、をさらに備える請求項6に記載の多関節ロボット。
【請求項8】
前記撮像装置は、前記第三リンク調節部が備える関節のうち前記第二リンクに最も近い位置に設けられた関節よりも前記基部の側に備えられ、
前記架台は、前記撮像装置をロール方向に回転させない、請求項7に記載の多関節ロボット。
【請求項9】
前記第三リンク調節部が備える関節のうち前記第二リンクに最も近い位置に設けられた関節は、前記第二回転軸及び前記第三回転軸に対して平行な方向の第四回転軸を有する第四関節であり、
前記撮像装置は、前記第四関節よりも前記エンドエフェクタの側に備えられ、
前記架台は、前記撮像装置をロール方向に回転させない、請求項7に記載の多関節ロボット。
【請求項10】
前記第三リンク調節部が備える関節のうち前記第二リンクに最も近い位置に設けられた関節は、前記第二回転軸及び前記第三回転軸に対して平行な方向の第四回転軸を有する第四関節であり、
前記撮像装置は、前記第四関節よりも前記エンドエフェクタの側に備えられる、
請求項6に記載の多関節ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、多関節ロボット、及びモバイルロボットに関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
特許文献1には、6軸多関節型ロボットが記載されている。具体的には、ロボットは、ベースに対して回転可能に支持された旋回胴と、旋回胴に対して回転可能に支持された第1アームと、第1アームに対して回転可能に支持された第2アームとを備えている。さらに、ロボットは、第2アームの先端に、3軸の手首ユニットを備え、手首ユニット先端には、ワークを把持する等の作業を行うツールであるハンドが装着されている。そして、ベースに対する旋回胴、旋回胴に対する第1アーム、第1アームに対する第2アームの移動を組み合わせることにより、手首ユニットを動作範囲内の任意の3次元位置に配置することができ、3軸の手首ユニットを作動させることにより、ハンドの姿勢を任意に移動させることができるようになっている。
【先行技術文献】
【特許文献】
【0003】
特開2020-181485号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
多関節ロボットの用途には、アームの基部が背の低い台車上のような床面に近い低い位置にあり、アームに支持されたハンドが床面から一定の高さがある場所で対象物を操作する用途がある。このような操作の第1の例として机の上に置かれた対象物を把持して対象物の位置や姿勢を変える操作、第2の例として多段の棚の奥の方に置かれた対象物を把持して対象物及びアームが上下の棚や棚上の横に置かれた他の物体に接触しないように対象物を引き出す操作がある。第1の例の場合には、机の面よりも高い位置に操作の実質的な起点となる関節(人体で例えれば肩に相当する関節)の位置を確保し、その関節よりもハンド側の部分で対象物の操作に必要な自由な動きができる必要がある。第2の例の場合には、対象物が置かれた棚の高さに操作の実質的な起点となる関節の位置を確保し、アームのハンドに近い部分を水平な姿勢に維持しつつ、操作の実質的な起点となる関節を水平な方向(対象物を引き出す方向)に移動させる必要がある。第1の例及び第2の例に代表されるような物体操作を起点利用型物体操作とよぶ。
【0005】
特許文献1に記載の6軸多関節ロボットでは、3次元位置を自由に調整できる関節は第2アームの先端の関節であり、第2アームの先端に備えられているのは3軸の手首ユニットだけであるから、第2アームの先端の関節を起点とする物体操作はできない。一方、多関節ロボットの関節数を十分多くすれば、第1の例及び第2の例のような操作も可能となるが、必要以上に多くの数の関節を備えることは、コストの増加、重量の増加、消費電力の増加などの面で不利である。
【0006】
本開示は、基部に旋回軸を備えることを前提として、旋回軸の方向に基部から離れた可変位置に操作の実質的な起点となる関節を配置可能にするとともに、関節の総数がなるべく少ない構造で、起点利用型物体操作ができる多関節ロボットを提供することを目的とする
【課題を解決するための手段】
【0007】
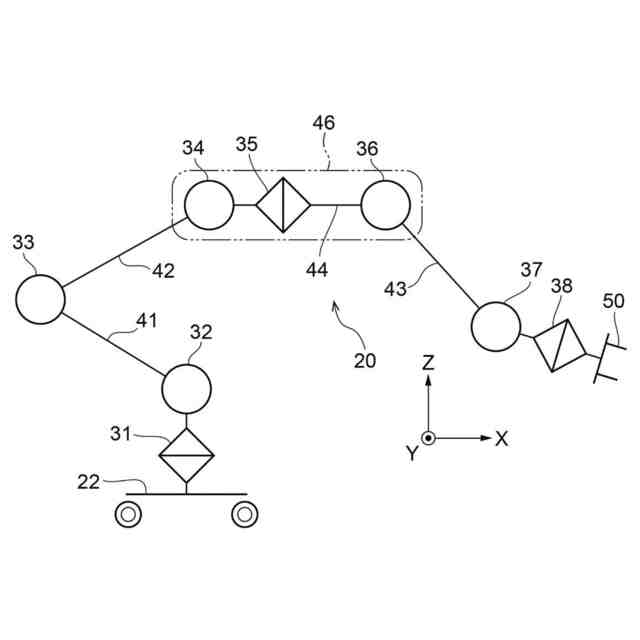
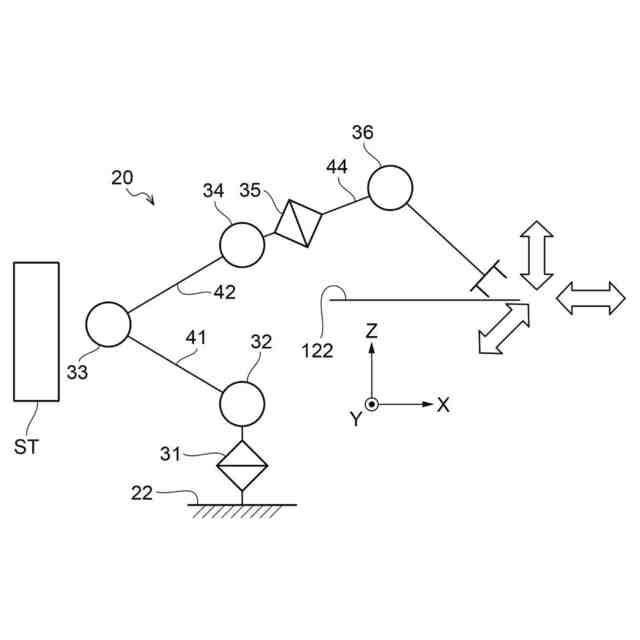
本開示の一態様は、基部に接続され基部に対して特定の方向の第一回転軸を有する第一関節と、前記第一関節に他の関節を介在させることなく接続され、前記第一回転軸に対して直交する方向の第二回転軸を有する第二関節と、前記第二関節に一端が接続され、前記第二回転軸に対して垂直な方向に長さを有する第一リンクと、前記第一リンクの他端に設けられ、前記第二回転軸と平行な第三回転軸を有する第三関節と、前記第三関節に一端が接続され、前記第三回転軸に対して垂直な方向に長さを有する第二リンクと、前記第二リンクの他端に設けられる第三リンク調節部と、前記第三リンク調節部に一端が接続される第三リンクと、前記第三リンク調節部に前記第三リンクを介して接続されるエンドエフェクタを備え、前記第三リンク調節部は、直列に接続され回転軸の方向が互いに直交する少なくとも2つの関節を備え前記第三リンクの長さ方向を任意の方向に向けることができる多関節ロボットである。
【0008】
本開示の他の態様は、基部に接続され基部に対して特定の方向の第一回転軸を有する第一関節と、前記第一関節に他の関節を介在させることなく接続され、前記第一回転軸に対して直交する方向の第二回転軸を有する第二関節と、前記第二関節に一端が接続され、前記第二回転軸に対して垂直な方向に長さを有する第一リンクと、前記第一リンクの他端に設けられ、前記第二回転軸と平行な第三回転軸を有する第三関節と、前記第三関節に一端が接続され、前記第三回転軸に対して垂直な方向に長さを有する第二リンクと、前記第二リンクの他端に設けられる第三リンク調節部と、前記第三リンク調節部に一端が接続さる第三リンクと、前記第三リンク調節部に前記第三リンクを介して接続されるエンドエフェクタを備え、前記第三リンク調節部は、直列に接続され回転軸の方向が互いに直交する少なくとも2つの関節を備え前記第三リンクの長さ方向を任意の方向に向けることができる多関節ロボットと、前記多関節ロボットを移動させる移動機構と、を有するモバイルロボットである。
【発明の効果】
【0009】
本開示によれば、基部に旋回軸を備えることを前提として、旋回軸の方向に基部から離れた可変位置である第二リンクの先端側に操作の実質的な起点となる関節を配置可能にするとともに、関節の総数がなるべく少ない構造で、起点利用型物体操作ができる。
【図面の簡単な説明】
【0010】
図1は第一実施形態の多関節ロボットを示す斜視図である。
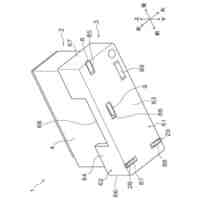
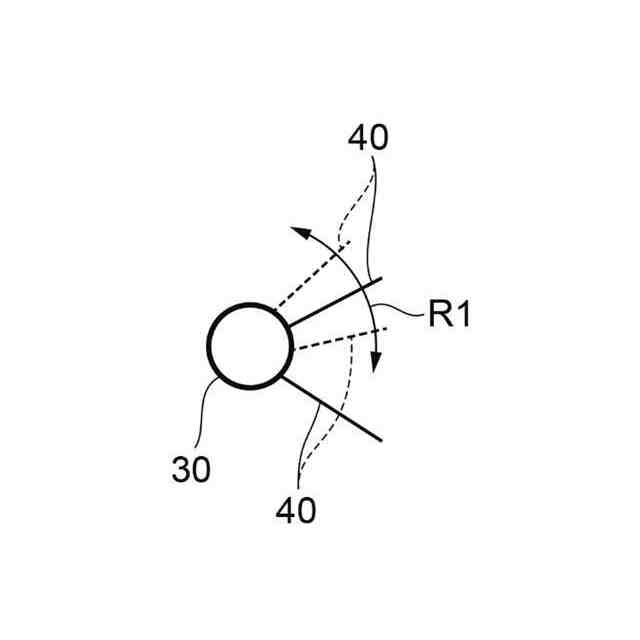
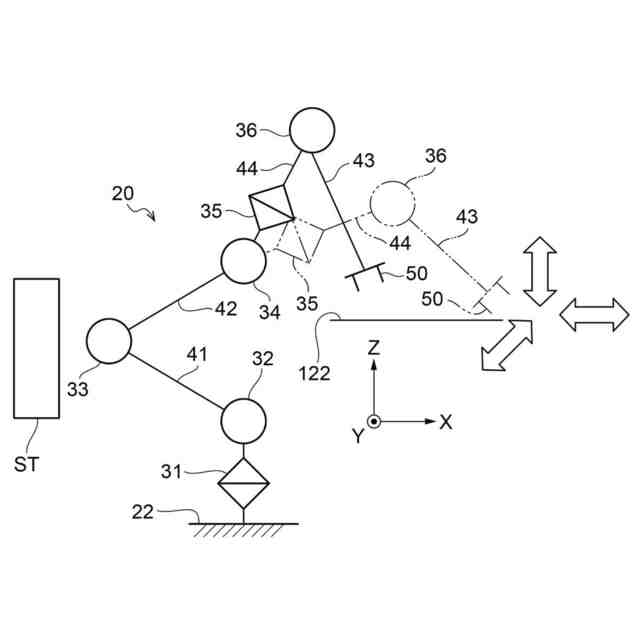
図2Aは第一実施形態の多関節ロボットの関節の動作を示す説明図である。
図2Bは第一実施形態の多関節ロボットの関節の動作を示す説明図である。
図2Cは第一実施形態の多関節ロボットの関節の動作を示す説明図である。
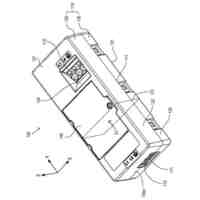
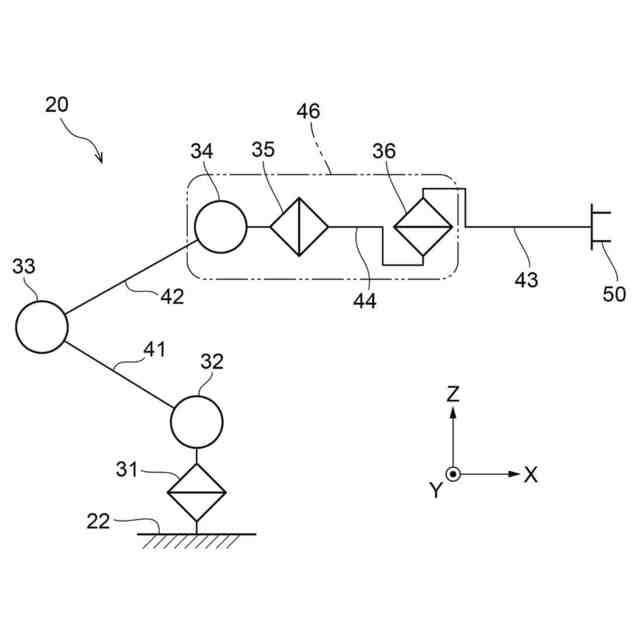
図3は第一実施形態の多関節ロボットを示す概略側面図である。
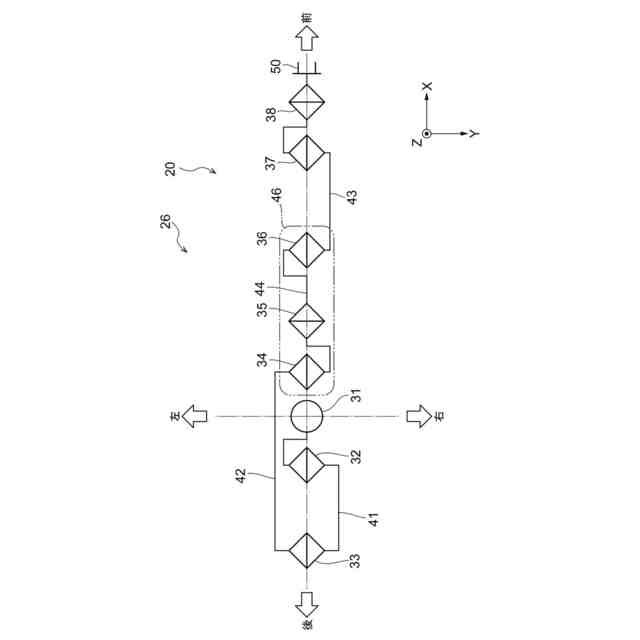
図4は第一実施形態の多関節ロボットを示す概略平面図である。
図5は第一実施形態の多関節ロボットの動作を示す概略側面図である。
図6は第一実施形態の多関節ロボットの動作を示す概略側面図である。
図7は第一実施形態の多関節ロボットの動作を示す概略側面図である。
図8は第一実施形態の多関節ロボットの動作を示す概略平面図である。
図9Aは第一実施形態の多関節ロボットのリンクの組合せ例を示す説明図である。
図9Bは第一実施形態の多関節ロボットのリンクの組合せ例を示す説明図である。
図10は第一実施形態の多関節ロボットの関節の組合せ例を示す説明図である。
図11は第一変形例の具体例の多関節ロボットを示す概略側面図である。
図12Aは第一変形例の具体例の多関節ロボットの関節の組合せ例を示す説明図である。
図12Bは第一変形例の具体例の多関節ロボットの関節の組合せ例を示す説明図である。
図12Cは第一変形例の具体例の多関節ロボットの関節の組合せ例を示す説明図である。
図12Dは第一変形例の具体例の多関節ロボットの関節の組合せ例を示す説明図である。
図12Eは第一変形例の具体例の多関節ロボットの関節の組合せ例を示す説明図である。
図13は第二変形例の具体例の多関節ロボットを示す概略側面図である。
図14は第二変形例の多関節ロボットの動作を示す概略側面図である。
図15は第二変形例の多関節ロボットの動作を示す概略側面図である。
図16は第二変形例の多関節ロボットの動作を示す概略側面図である。
図17は第二変形例の多関節ロボットの動作を示す概略側面図である。
図18Aは第二変形例の多関節ロボットの関節の組合せ例を示す説明図である。
図18Bは第二変形例の多関節ロボットの関節の組合せ例を示す説明図である。
図19は第二変形例の多関節ロボットの動作を示す概略側面図である。
図20は第二変形例の多関節ロボットの動作を示す概略平面図である。
図21は第二変形例の多関節ロボットの動作を示す概略平面図である。
図22は第三変形例の多関節ロボットの関節の組合せ例を示す概略側面図である。
図23は第三変形例の多関節ロボットの動作を示す概略側面図である。
図24は第三変形例の多関節ロボットの関節の組合せ例を示す説明図である。
図25は第一実施形態の多関節ロボットの関節を示す概略側面図である。
図26は第一実施形態の多関節ロボットの関節の動作を示す概略側面図である。
図27は第一実施形態の多関節ロボットの動作を示す概略側面図である。
図28Aは第一実施形態の多関節ロボットの関節の組合せ例を示す説明図である。
図28Bは第一実施形態の多関節ロボットの関節の組合せ例を示す説明図である。
図29は第一実施形態の多関節ロボットを示す概略側面図である。
図30は第四変形例の多関節ロボットを示す概略側面図である。
図31は第五変形例の多関節ロボットを示す概略側面図である。
図32は第六変形例の多関節ロボットを示す概略側面図である。
図33は第一実施形態のモバイルロボットを示す概略側面図である。
図34は第一実施形態のモバイルロボットを示す概略側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
充電装置
6日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
電力開閉器
2日前
オムロン株式会社
スレーブ装置
27日前
オムロン株式会社
トリガスイッチ
23日前
オムロン株式会社
光干渉測距センサ
1か月前
オムロン株式会社
回転装置及びマウス
27日前
オムロン株式会社
電力開閉器及び電気機器
2日前
オムロン株式会社
情報取得装置、及び自動改札機
27日前
オムロン株式会社
制御装置、方法、及びプログラム
1か月前
オムロン株式会社
X線撮影システム及びX線検査装置
13日前
オムロン株式会社
コントローラ、方法およびプログラム
2日前
オムロン株式会社
解析装置、解析方法およびプログラム
10日前
オムロン株式会社
協調作業システム、方法およびプログラム
27日前
オムロン株式会社
学習装置、操作情報変換装置及び学習方法
27日前
オムロン株式会社
評価装置、評価方法および評価プログラム
9日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
13日前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
9日前
オムロン株式会社
信号制御システム、およびステップアップ方法
1か月前
オムロン株式会社
蓄電装置、蓄電システム、制御方法及びプログラム
12日前
オムロン株式会社
検査システム、検査装置、検査方法及びプログラム
11日前
オムロン株式会社
振動体およびこれを備えた振動ユニット、コントローラ
11日前
オムロン株式会社
軌道決定装置、軌道決定方法および軌道決定プログラム
9日前
オムロン株式会社
文字入力装置、文字入力方法および文字入力プログラム
6日前
オムロン株式会社
異物合成画像生成装置、異物合成画像生成方法及びデータ構造
11日前
オムロン株式会社
モニタリング装置、モニタリング方法、およびモニタリングプログラム
3日前
オムロン株式会社
パワーコンディショナ
1か月前
オムロン株式会社
異物ライブラリ生成装置、異物ライブラリ生成方法、分析支援装置及びデータ構造
11日前
オムロン株式会社
分散電源システム、分散電源システムにおける切替装置及び、分散電源システムにおける接続状態の切替方法
10日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
23日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
6日前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ