TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025056490
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023165994
出願日
2023-09-27
発明の名称
段積みシステムおよび段積み方法
出願人
株式会社デンソーウェーブ
代理人
弁理士法人サトー
主分類
B25J
15/00 20060101AFI20250401BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】段積みに係るサイクルタイムを短くする。
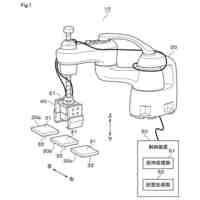
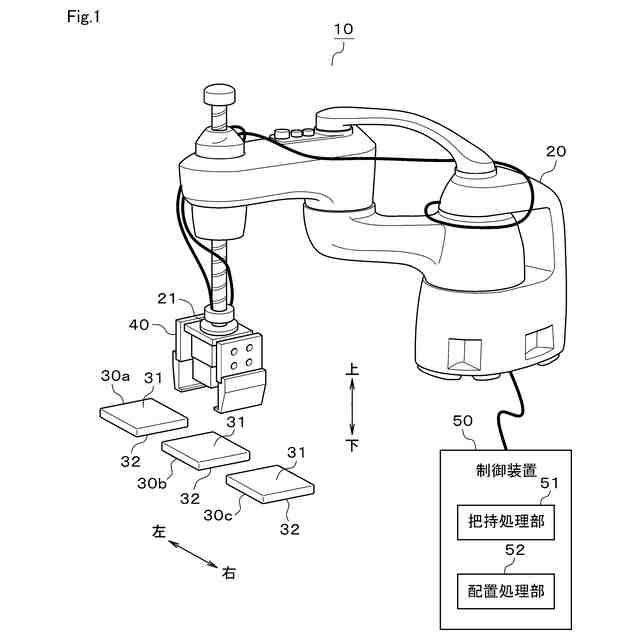
【解決手段】段積みシステム10は、互いに離れた取得場所に置かれた複数のワーク30を所定の配置場所に段積みするものであり、ワーク30を把持するためのハンド40が先端に取り付けられたロボットアーム20と、ロボットアーム20の動作を制御する制御装置50と、を備える。ハンド40は、複数のワーク30を多段に積み重ねた状態で同時に全てを把持することができる構造となっている。制御装置50は、ロボットアーム20の先端を取得場所の近傍に移動させて複数のワーク30のそれぞれをハンド40により1個ずつ把持する把持処理と、把持処理を繰り返し実行することにより複数のワーク30の全てをハンド40により把持した後、ロボットアーム20の先端を配置場所の近傍に移動させて複数のワーク30の全てを多段に積み重ねた状態を維持しつつ配置場所に置く配置処理と、を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームを用いて互いに離れた取得場所に置かれた複数のワークを所定の配置場所に段積みするシステムであって、
前記ワークを把持するためのハンドが先端に取り付けられた前記ロボットアームと、
前記ロボットアームの動作を制御する制御装置と、
を備え、
前記ハンドは、前記複数のワークを多段に積み重ねた状態で同時に全てを把持することができる構造となっており、
前記制御装置は、
前記ロボットアームの先端を前記取得場所の近傍に移動させて前記複数のワークのそれぞれを前記ハンドにより1個ずつ把持する把持処理と、
前記把持処理を繰り返し実行することにより前記複数のワークの全てを前記ハンドにより把持した後、前記ロボットアームの先端を前記配置場所の近傍に移動させて前記複数のワークの全てを多段に積み重ねた状態を維持しつつ前記配置場所に置く配置処理と、
を実行する段積みシステム。
続きを表示(約 1,800 文字)
【請求項2】
前記ワークは、互いに対向する2つの主面を有する平板形状をなしており、
前記主面に沿う互いに直交する2方向のうちの一方を左右方向とするとともに、前記主面に直交する方向を上下方向とすると、
前記ハンドは、左右方向に平行移動して開閉する2つの爪部を備え、
前記2つの爪部の先端には、左右方向に沿って延びる形状の載置部が設けられており、
前記制御装置は、
前記把持処理において、
把持する対象となる前記ワークである対象ワークの上方向の位置に前記ハンドを移動させる処理と、
前記2つの爪部を左右方向に沿って開くとともに前記ハンドを下方向に移動させる処理と、
前記2つの爪部を左右方向に沿って閉じることにより前記載置部に前記対象ワークを載せる処理と、
を実行する請求項1に記載の段積みシステム。
【請求項3】
前記ワークは、互いに対向する2つの主面を有する平板形状をなしており、
前記主面に沿う互いに直交する2方向のうちの一方を左右方向とするとともに、前記主面に直交する方向を上下方向とすると、
前記ハンドは、左右方向に平行移動して開閉する2つの爪部を備え、
前記2つの爪部の先端には、左右方向に沿って延びる形状の載置部が設けられており、
前記載置部は、その基端部を中心として、その先端部が上方向に向けて回転可能に構成されており、
前記制御装置は、
前記把持処理において、
把持する対象となる前記ワークである対象ワークの上方向の位置に前記ハンドを移動させる処理と、
前記ハンドを下方向に移動させることにより前記載置部に前記対象ワークを載せる処理と、
を実行する請求項1に記載の段積みシステム。
【請求項4】
前記載置部の上下方向の寸法は、前記ワークの上下方向の寸法に比べて小さくなっている請求項2に記載の段積みシステム。
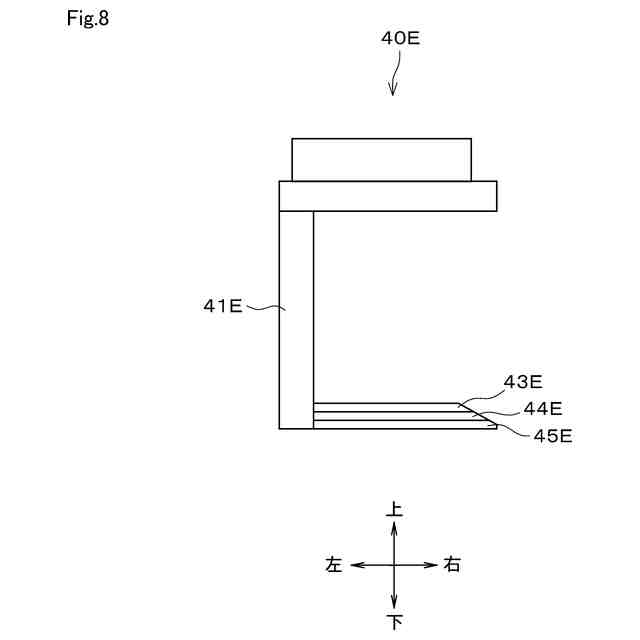
【請求項5】
前記ワークは、互いに対向する2つの主面を有する平板形状をなしており、
前記主面に沿う互いに直交する2方向のうちの一方を左右方向とするとともに、前記主面に直交する方向を上下方向とすると、
前記ハンドは、1つの爪部を備え、
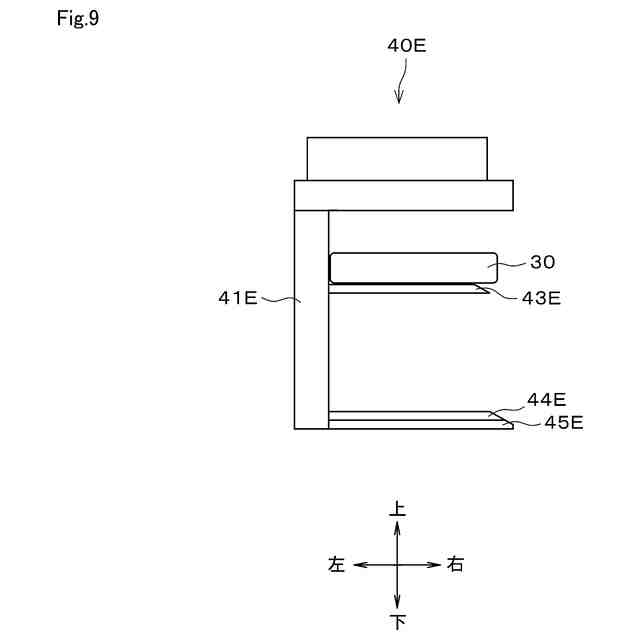
前記爪部の先端には、左右方向に沿って延びる形状の複数の載置部が上下方向に沿って積み重なるように設けられており、
前記複数の載置部は、いずれも上下方向および左右方向に沿って移動可能に構成されており、
前記制御装置は、
前記把持処理において、
把持する対象となる前記ワークである対象ワークの上方向の位置に前記ハンドを移動させる処理と、
前記ハンドを下方向に移動させるとともに左右方向に移動させることにより前記載置部に前記対象ワークを載せる処理と、
前記対象ワークを載せた前記載置部を上方向に移動させる処理と、
を実行し、
前記配置処理において、
前記ハンドを上下方向に対して傾ける処理、または、前記複数の載置部を左右方向に移動させることにより前記ハンド から引き抜く処理を実行する請求項1に記載の段積みシステム。
【請求項6】
前記ハンドは、前記ワークを把持した状態において前記ワークの前記主面を除く面である側面を支持する支持部を備えている請求項2から5のいずれか一項に記載の段積みシステム。
【請求項7】
ロボットアームを用いて互いに離れた取得場所に置かれた複数のワークを所定の配置場所に段積みする方法であって、
前記ロボットアームは、その先端に前記ワークを把持するためのハンドが取り付けられており、
前記ハンドは、前記複数のワークを多段に積み重ねた状態で同時に全てを把持することができる構造となっており、
前記ロボットアームの先端を前記取得場所の近傍に移動させて前記複数のワークのそれぞれを前記ハンドにより1個ずつ把持する把持処理と、
前記把持処理を繰り返し実行することにより前記複数のワークの全てを前記ハンドにより把持した後、前記ロボットアームの先端を前記配置場所の近傍に移動させて前記複数のワークの全てを多段に積み重ねた状態を維持しつつ前記配置場所に置く配置処理と、
を実行する段積み方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、ロボットアームを用いた段積みシステムおよび段積み方法に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
製品の生産ラインなどにおいて、互いに離れた場所にばらばらに置かれた平板形状をなす複数のワークを、所定の配置場所に段積みする、といった工程が存在する。段積みとは、縦方向に多段に積み重ねることを意味している。特許文献1には、このような段積みを行うための段積み装置が開示されている。特許文献1に開示された段積み装置は、段積みを行う位置に固定された複雑な構造のものである。そこで、従来、移動の自由度や構造の簡素化などを目的として、ロボットアームを用いて段積みを行うシステムが検討されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-081741号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常、ロボットアームを用いて段積みを行う場合、次のような動作の流れとなる。まず、ロボットアームの先端をワークが置かれた取得場所の近傍に移動させ、そのワークをロボットアームの先端に取り付けられたハンドで把持する。その後、ロボットアームの先端を配置場所の近傍に移動させ、そのワークを配置場所に仮置きする。これら把持および仮置きの動作を、全てのワークに対して実行することにより、配置場所に複数のワークが段積みされる。このような通常の動作の流れによる段積みでは、配置場所にワークを1個ずつ仮置きして積み重ねていくことから、ロボットアームの移動距離が長くなり、その結果、段積みに係るサイクルタイムの長期化を招くおそれがある。
【0005】
本発明は上記事情に鑑みてなされたものであり、その目的は、段積みに係るサイクルタイムを短くすることができる段積みシステムおよび段積み方法を提供することにある。
【課題を解決するための手段】
【0006】
実施形態の段積みシステムは、ロボットアームを用いて互いに離れた取得場所に置かれた複数のワークを所定の配置場所に段積みするシステムである。段積みシステムは、前記ワークを把持するためのハンドが先端に取り付けられた前記ロボットアームと、前記ロボットアームの動作を制御する制御装置と、を備える。前記ハンドは、前記複数のワークを多段に積み重ねた状態で同時に全てを把持することができる構造となっている。前記制御装置は、前記ロボットアームの先端を前記取得場所の近傍に移動させて前記複数のワークのそれぞれを前記ハンドにより1個ずつ把持する把持処理と、前記把持処理を繰り返し実行することにより前記複数のワークの全てを前記ハンドにより把持した後、前記ロボットアームの先端を前記配置場所の近傍に移動させて前記複数のワークの全てを多段に積み重ねた状態を維持しつつ前記配置場所に置く配置処理と、を実行する。
【図面の簡単な説明】
【0007】
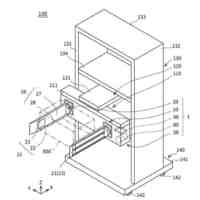
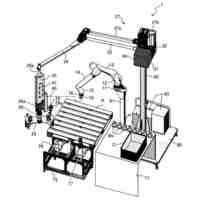
一実施形態に係る段積みシステムの構成を模式的に示すものであり、複数のワークが互いに異なる取得場所にある状態を示す図
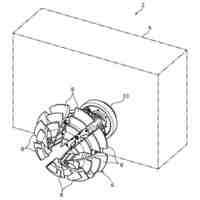
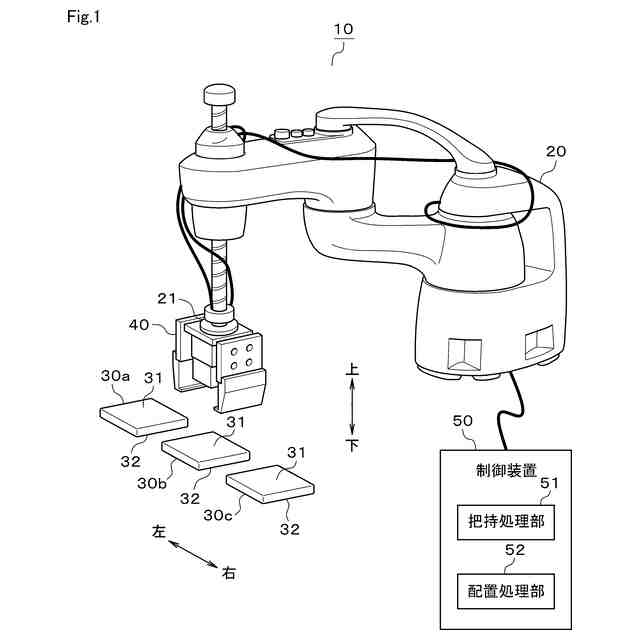
一実施形態に係る段積みシステムの構成を模式的に示すものであり、複数のワークが配置場所において段積みされた状態を示す図
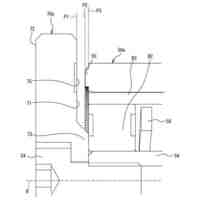
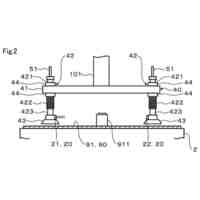
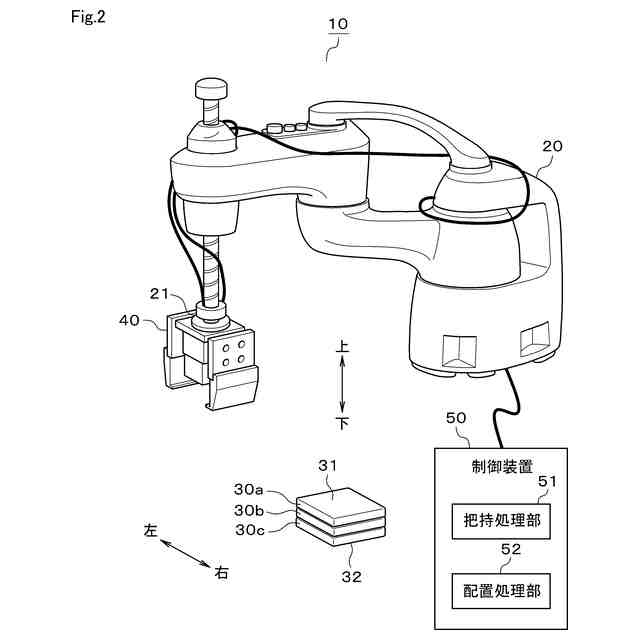
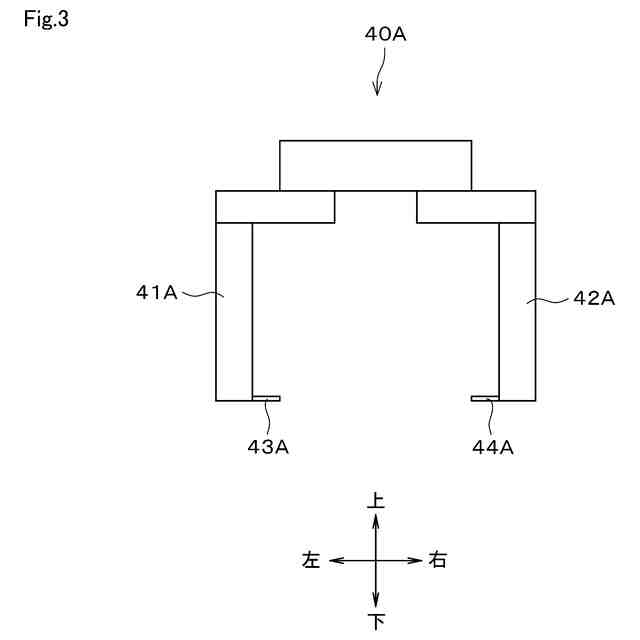
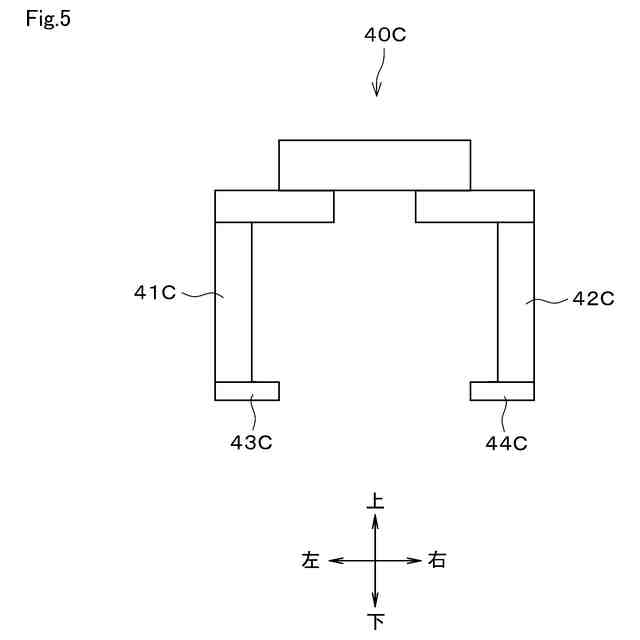
一実施形態に係るハンドの具体的な第1構成例を示す図
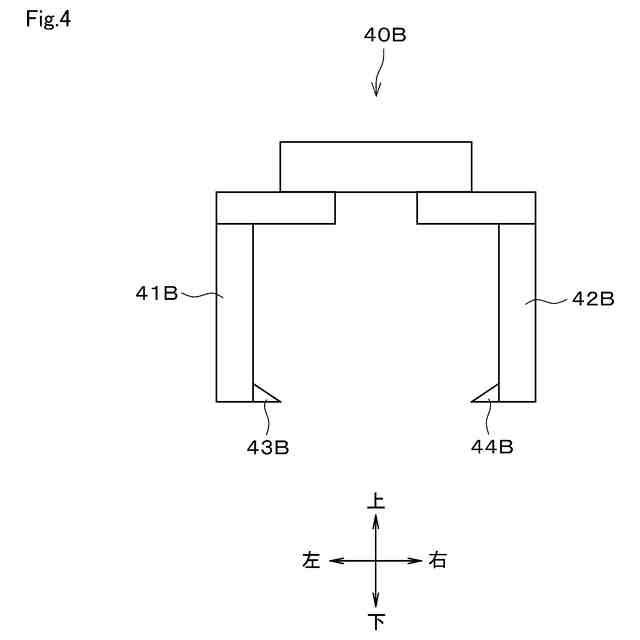
一実施形態に係るハンドの具体的な第2構成例を示す図
一実施形態に係るハンドの具体的な第3構成例を示す図
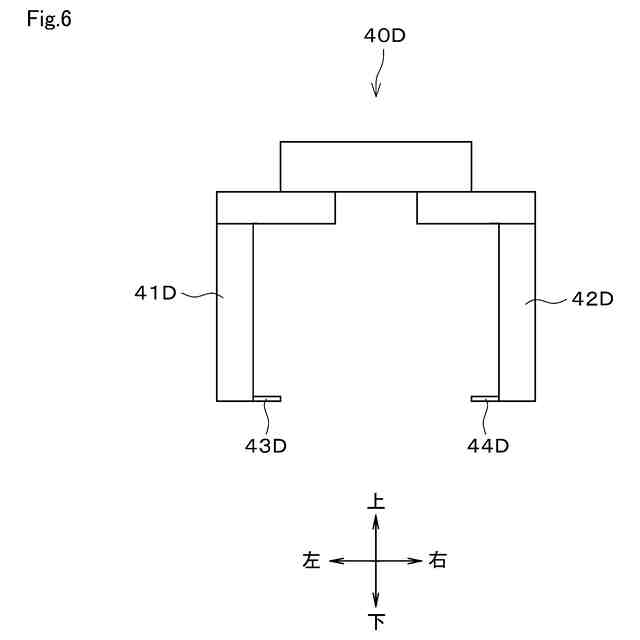
一実施形態に係るハンドの具体的な第4構成例を示す図
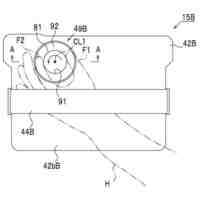
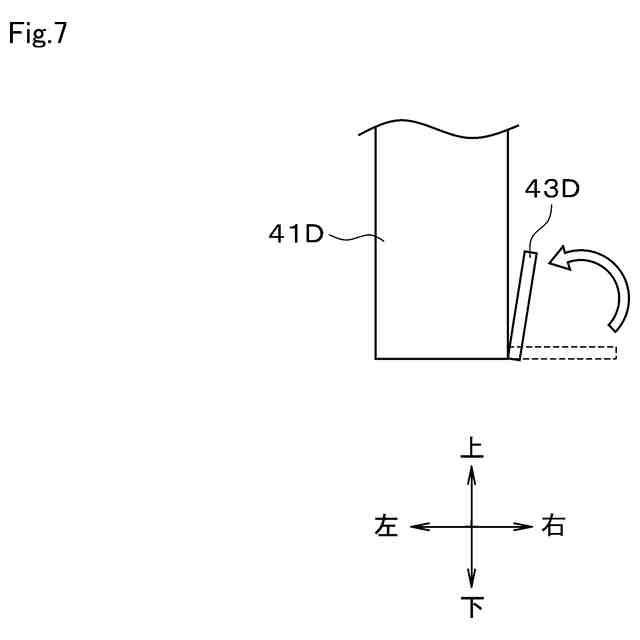
一実施形態に係るハンドの具体的な第4構成例を示すものであり、載置部が上方向に倒れる様子を表す図
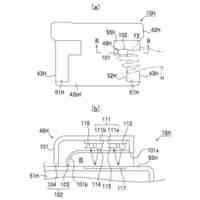
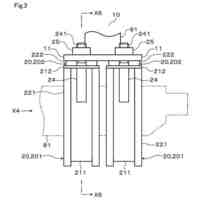
一実施形態に係るハンドの具体的な第5構成例を示すものであり、ワークを把持していない状態を示す図
一実施形態に係るハンドの具体的な第5構成例を示すものであり、1つのワークを把持している状態を示す図
一実施形態に係る制御装置が実行する第1処理の内容の一例を示す図
一実施形態に係る制御装置が第1処理を実行する場合における一連の動作の流れを説明するための図
一実施形態に係る制御装置が実行する第2処理の内容の一例を示す図
一実施形態に係る制御装置が第2処理を実行する場合における一連の動作の流れを説明するための図
一実施形態に係る制御装置が実行する第3処理の内容の一例を示す図
一実施形態に係る制御装置が第3処理を実行する場合における一連の動作の流れを説明するための図
比較例に係る段積みにおけるアーム先端の移動距離を説明するための図
一実施形態に係る段積みにおけるアーム先端の移動距離を説明するための図
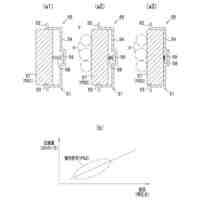
一実施形態に係る第2構成例のハンドを採用した場合の2個目以降のワークを把持する際の動作を説明するための図
一実施形態に係る第1構成例のハンドを採用した場合の2個目以降のワークを把持する際の動作を説明するための図
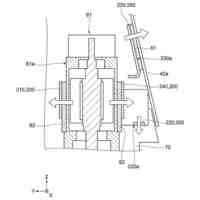
一実施形態に係るハンドの変形例の構成を示す斜視図であり、ワークを把持していない状態を示す図
一実施形態に係るハンドの変形例の構成を示す斜視図であり、ワークを把持している状態を示す図
一実施形態に係る段積みされた複数のワーク同士が多少ずれた状態と段積みされた複数のワークを揃えた状態とを示す図
【発明を実施するための形態】
【0008】
以下、一実施形態による段積みシステムについて、図面を参照しながら説明する。図1および図2に示すように、段積みシステム10は、ロボットアーム20を用いて複数のワーク30a、30b、30cを段積みするシステムである。具体的には、段積みシステム10は、ロボットアーム20を用いて、図1に示すように、ばらばらに置かれた複数のワーク30a~30c、つまり互いに離れた取得場所に置かれた複数のワーク30a~30cを、図2に示すように、所定の配置場所に段積みするシステムである。取得場所および配置場所は、平面を有する台、容器などの任意の場所に設定される。段積みとは、配置場所の平面に垂直の方向に多段に積み重ねることを意味している。なお、以下の説明では、ワーク30a~30cについて区別する必要が無い場合、ワーク30と総称することとする。
【0009】
本実施形態では、3つのワーク30a~30cを段積みする場合を例示しているが、段積みの対象とするワーク30の数は3つに限らずともよく、2つでもよいし、4つ以上でもよい。ただし、段済みの対象とするワークの数は、ロボットアーム20が把持可能な数に限られる。ロボットアーム20は、例えば4軸のアームを有する水平多関節型ロボットとして構成されている。ワーク30は、例えば食品などであり、いわゆる平べったい形状をなしている。具体的には、ワーク30は、互いに対向する2つの主面31、32を有する平板形状をなしている。本明細書では、ワーク30の主面31、32に沿う互いに直交する2方向のうちの一方を左右方向とするとともに、主面31、32に直交する方向を上下方向とする。
【0010】
ロボットアーム20の先端には、ワーク30を把持するためのハンド40が取り付けられている。ハンド40は、複数のワーク30を多段に積み重ねた状態で同時に全てを把持することができる構造となっている。図1および図2では、このような構造を有するハンド40の一構成例を示しているが、ハンド40の構造は、これに限らずともよく、後述するような各種の構造を含め、様々な構造を採用することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
20日前
株式会社クレスコ
補助吸着具
13日前
株式会社不二越
ロボット
5日前
株式会社エビス
腰ベルト用連結具
20日前
工機ホールディングス株式会社
作業機
28日前
川崎重工業株式会社
制動システム
5日前
株式会社イノウ
給油口キャップ用開閉具
6日前
株式会社不二越
垂直多関節ロボット
6日前
アイホン株式会社
ネジ締めカウントシステム
7日前
株式会社デンソーウェーブ
ロボット制御システム
26日前
パナソニック株式会社
工具
6日前
パナソニック株式会社
工具
6日前
学校法人法政大学
装着型アシスト装置
1か月前
アピュアン株式会社
エアー式衝撃工具
23日前
株式会社マキタ
打ち込み工具
7日前
株式会社マキタ
インパクト工具
21日前
株式会社マキタ
インパクト工具
21日前
中国電力株式会社
電動ドライバー
27日前
株式会社不二越
ロボットの教示システム及び教示方法
27日前
SB C&S株式会社
治具セット
20日前
オムロン株式会社
モバイルロボット
27日前
オムロン株式会社
モバイルロボット
27日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
23日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
27日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
27日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
27日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
27日前
シナノケンシ株式会社
把持装置
27日前
株式会社星野商店
塗装ロボット用保護カバー
6日前
トーヨーコーケン株式会社
ワーク搬送システム
27日前
セイコーエプソン株式会社
ロボット、及びロボットシステム
23日前
株式会社デンソーウェーブ
段積みシステムおよび段積み方法
29日前
学校法人常翔学園
エンドエフェクタ及びロボット
5日前
株式会社デンソーウェーブ
ロボットへの振動工具の取付装置
29日前
株式会社安川電機
ロボットシステム、コントローラ及び制御方法
20日前
株式会社デンソーウェーブ
ロボットシステム、及び折り畳み方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ