TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025064034
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023173423
出願日
2023-10-05
発明の名称
ロボットシステム、コントローラ及び制御方法
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250410BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本開示は、ロボットシステム及び制御方法に関する。
【解決手段】ロボットシステム1は、ワーク90のターゲット部位91に作業を行うためのツール3と、ツール3を変位させるアーム10と、を有するロボット2と、ワーク90の振動を検出する振動検出部111と、振動の検出結果に基づいて、振動による変位方向の折り返し位置にワーク90が到達する到達タイミングを推定する推定部114と、到達タイミングに基づいて、ターゲット部位91への作業を行うようにアーム10を制御する制御部115と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
ワークのターゲット部位に作業を行うためのツールと、
前記ツールを変位させるアームと、
を有するロボットと、
前記ワークの振動を検出する振動検出部と、
前記振動の検出結果に基づいて、前記振動による変位方向の折り返し位置に前記ワークが到達する到達タイミングを推定する推定部と、
前記到達タイミングに基づいて、前記ターゲット部位への前記作業を行うように前記アームを制御する制御部と、
を備えるロボットシステム。
続きを表示(約 1,600 文字)
【請求項2】
前記ワークを搬送するコンベヤを更に備え、
前記制御部は、前記コンベヤによる前記ワークの搬送に追従して前記ツールを変位させるように前記アームを制御しながら、前記到達タイミングを待機する、
請求項1記載のロボットシステム。
【請求項3】
前記制御部は、
前記到達タイミングにおける、前記コンベヤによる前記ワークの搬送速度と、前記ターゲット部位の位置とに基づいて、前記ツールの目標到達位置を算出し、
前記目標到達位置へ前記ツールを変位させるように前記アームを制御する、
請求項2記載のロボットシステム。
【請求項4】
前記振動検出部は、前記ツールと共に変位する基準位置に対する前記ワークの前記振動を検出し、
前記推定部は、前記ツールに対する変位方向の前記折り返し位置に前記ワークが到達する前記到達タイミングを推定する、
請求項1~3のいずれか一項記載のロボットシステム。
【請求項5】
前記基準位置から前記ワークに向かうように前記ロボットに取り付けられたカメラを更に備え、
前記振動検出部は、前記カメラにより撮影された前記ワークの画像に基づいて、前記ワークの前記振動を検出する、
請求項4記載のロボットシステム。
【請求項6】
前記振動検出部は、
前記ツールと共に変位しない第1基準位置に対する前記ワークの第1振動を検出する第1検出部と、
前記ツールと共に変位する第2基準位置に対する前記ワークの第2振動を検出する第2検出部と、
を有し、
前記制御部は、前記第1振動に追従して前記ツールを変位させるように前記アームを制御しながら、前記到達タイミングを待機し、
前記推定部は、前記第2振動の検出結果に基づいて、前記第2振動による変位方向の前記折り返し位置に前記ワークが到達する前記到達タイミングを推定する、
請求項1記載のロボットシステム。
【請求項7】
前記制御部は、
前記到達タイミングにおける、前記第1振動と、前記ターゲット部位の位置とに基づいて、前記ツールの目標到達位置を算出し、
前記目標到達位置へ前記ツールを変位させるように前記アームを制御する、
請求項6記載のロボットシステム。
【請求項8】
前記第1基準位置から前記ワークに向かうように前記ロボットの周辺に取り付けられた第1カメラと、
前記第2基準位置から前記ワークに向かうように前記ロボットに取り付けられた第2カメラと、
を更に備え、
前記第1検出部は、前記第1カメラにより撮影された画像に基づいて前記第1振動を検出し、
前記第2検出部は、前記第2カメラにより撮影された画像に基づいて前記第2振動を検出する、
請求項6又は7記載のロボットシステム。
【請求項9】
前記第2カメラは、前記ターゲット部位を含む前記ワークの第1面に向かうように前記ロボットに取り付けられ、
前記第1カメラは、前記第1面とは異なる前記ワークの第2面に向かうように前記ロボットの周辺に取り付けられている、
請求項8記載のロボットシステム。
【請求項10】
前記制御部は、
前記振動による前記ワークの変位方向に交差する方向に沿って前記ワークから離れた待機位置に前記ツールを配置するように前記アームを制御し、
前記到達タイミングに基づいて、前記待機位置から前記ターゲット部位に向かって前記ツールを変位させるように前記アームを制御する、
請求項1記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム、コントローラ及び制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、ロボットシステムが開示されている。ロボットシステムは、搬送手段により搬送されているワークを1回又は複数回撮像する第1の撮像手段と、第1の撮像手段により撮像された撮像画像に基づいて、ワークを検出する検出手段と、搬送手段により搬送されているワークを取り出すロボットと、撮像画像に基づいて、ワークの高さを取得する高さ取得手段と、高さ取得手段により取得された高さが、所定の閾値以上であるときに、検出手段による検出で用いられる検出条件を限定する条件限定手段と、条件限定手段により検出条件が限定された後に、第1の撮像手段により撮像された1枚又は複数枚の撮像画像において、ワークの下方を探索し、第1の検出手段により新たなワークを検出する探索手段と、探索手段により新たなワークが検出された場合には、当該検出の結果を、ロボットによる取出し動作に利用するため、探索手段の外部に伝達する伝達手段と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開2021-45835号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、振動するワークに対し、ツールを高精度で配置するのに有効なロボットシステムを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットシステムは、ワークのターゲット部位に作業を行うためのツールと、ツールを変位させるアームと、を有するロボットと、ワークの振動を検出する振動検出部と、振動の検出結果に基づいて、振動による変位方向の折り返し位置にワークが到達する到達タイミングを推定する推定部と、到達タイミングに基づいて、ターゲット部位への作業を行うようにアームを制御する制御部と、を備える。
【0006】
本開示の他の側面に係る制御装置は、ワークのターゲット部位に作業を行うためのツールと、ツールを変位させるアームと、を有するロボットを制御する装置であって、ワークの振動を検出する振動検出部と、振動の検出結果に基づいて、振動による変位方向の折り返し位置にワークが到達する到達タイミングを推定する推定部と、到達タイミングに基づいて、ターゲット部位への作業を行うようにアームを制御する制御部と、を備える。
【0007】
本開示の更に他の側面に係る制御方法は、ワークの振動を検出することと、振動の検出結果に基づいて、振動による変位方向の折り返し位置にワークが到達する到達タイミングを推定することと、到達タイミングに基づいて、ワークのターゲット部位への作業を行うようにロボットのアームを制御することと、を含む。
【発明の効果】
【0008】
本開示によれば、振動するワークに対し、ツールを高精度で配置するのに有効なロボットシステムを提供することができる。
【図面の簡単な説明】
【0009】
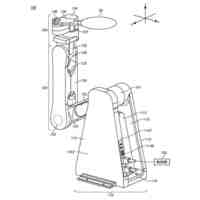
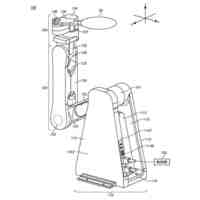
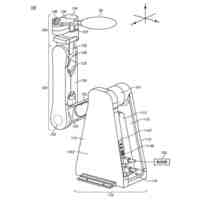
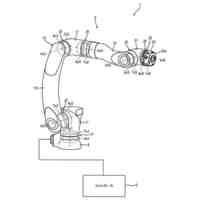
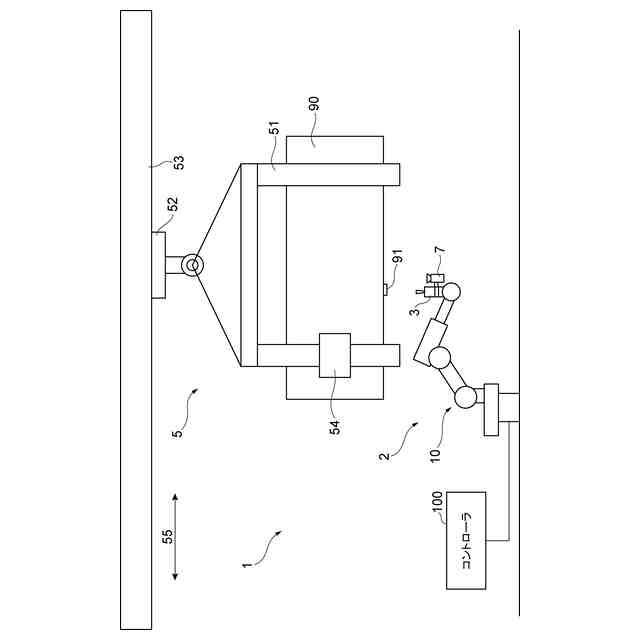
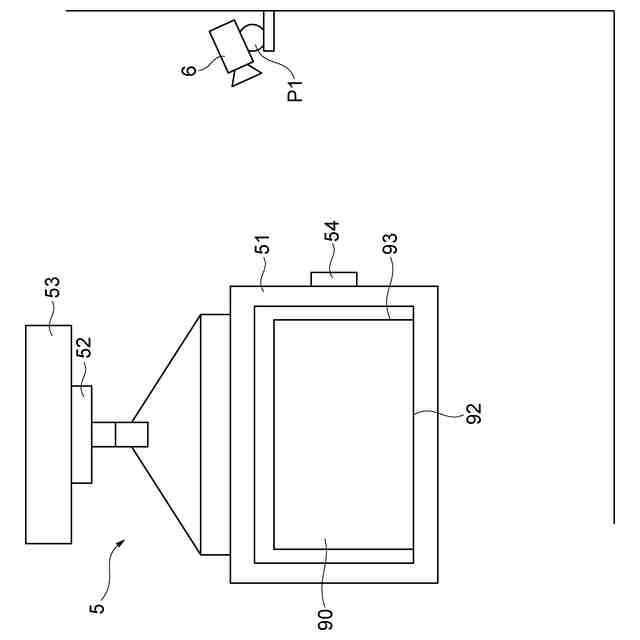
ロボットシステムの構成を例示する模式図である。
ロボットシステムの構成を例示する模式図である。
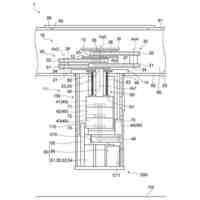
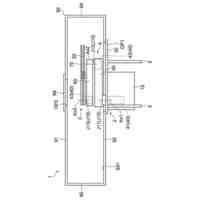
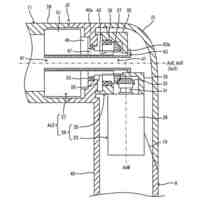
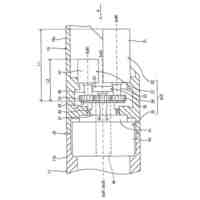
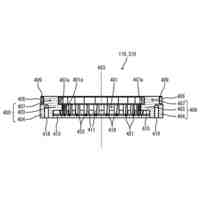
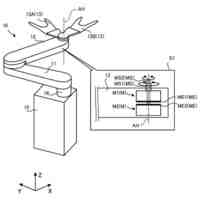
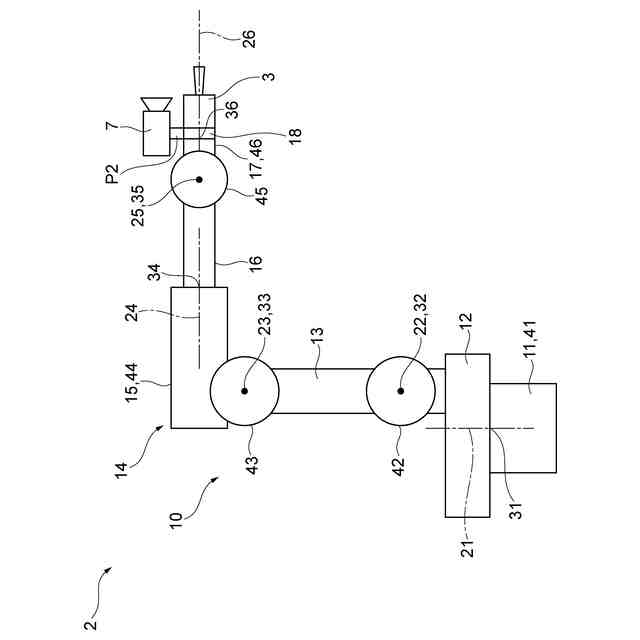
ロボットの構成を例示する模式図である。
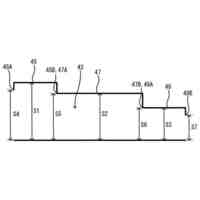
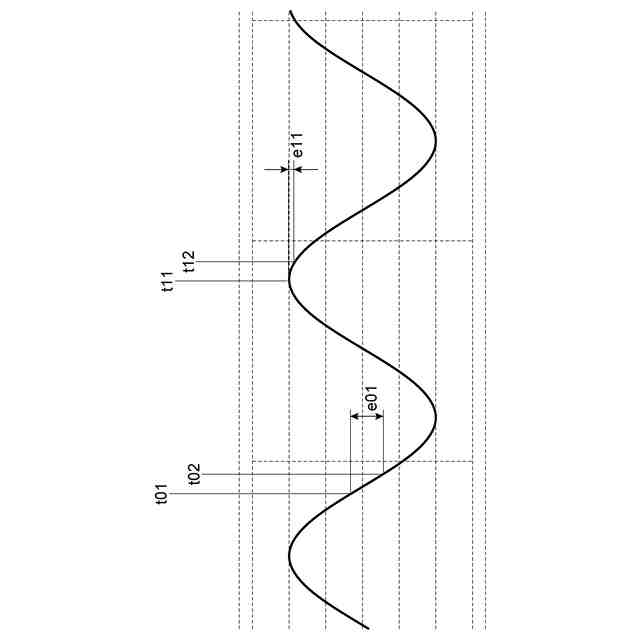
ワークの振動中において、ツールの変位開始タイミングと、ツール到達までのターゲット部位の変位量との関係を例示するグラフである。
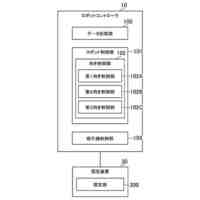
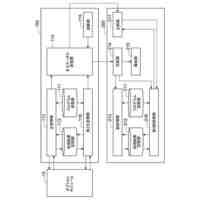
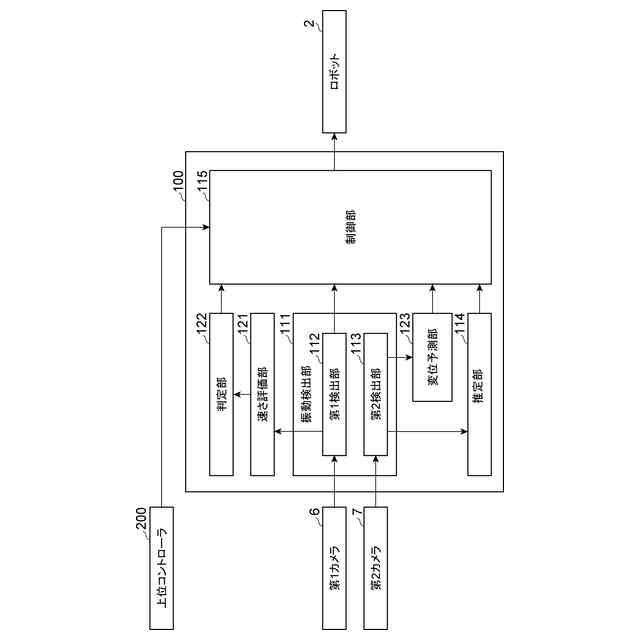
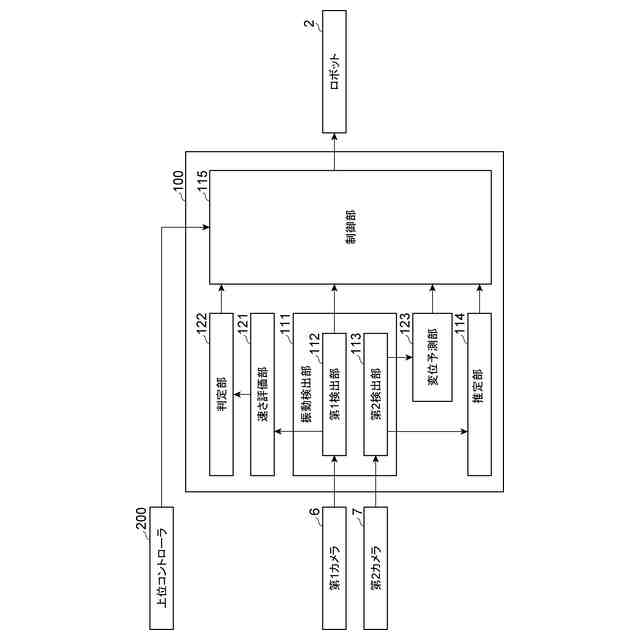
コントローラの機能的な構成を例示するブロック図である。
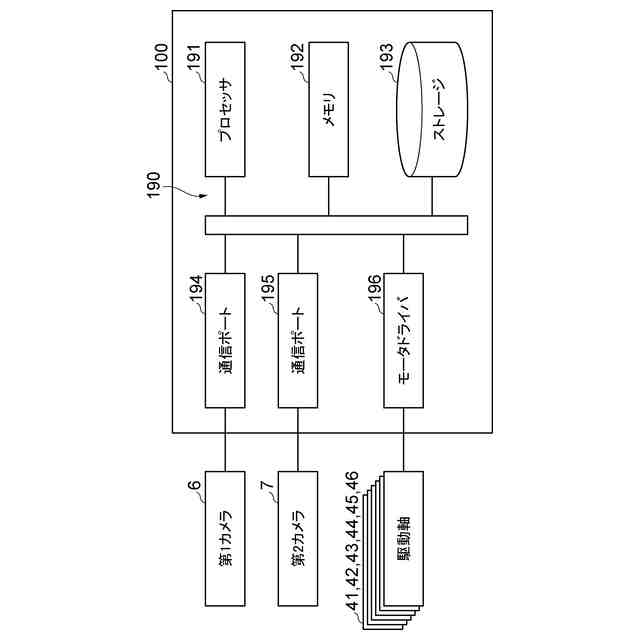
コントローラのハードウェア構成を例示するブロック図である。
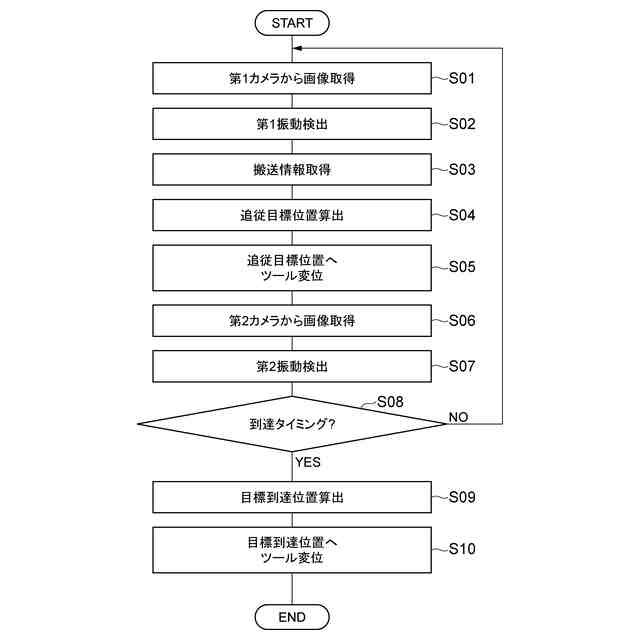
制御手順を例示するフローチャートである。
【発明を実施するための形態】
【0010】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
4か月前
株式会社安川電機
ロボット
今日
株式会社安川電機
ロボット
今日
株式会社安川電機
ロボット
今日
株式会社安川電機
ロボット
今日
株式会社安川電機
ロボット及びシステム
2か月前
株式会社安川電機
システム及びロボット
2か月前
株式会社安川電機
ロボット及び基板搬送装置
4か月前
株式会社安川電機
ロボット、ロボットの製造方法
2日前
株式会社安川電機
ロボット、ロボットの製造方法
2日前
株式会社安川電機
制御装置及び制御装置の冷却方法
1か月前
株式会社安川電機
ロボットシステム及びロボット制御方法
3か月前
株式会社安川電機
ロボットシステム及びロボット制御方法
4か月前
株式会社安川電機
ロボット制御システム及び梱包資材の切断方法
4か月前
株式会社安川電機
ロボットシステム、コントローラ及び制御方法
1か月前
株式会社安川電機
ロボット、システム、制御方法、及びプログラム
2か月前
株式会社安川電機
ロボット、システム、制御方法、及びプログラム
2か月前
株式会社安川電機
ロボットシステム、ロボット、ロボットの制御方法
16日前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
今日
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
今日
株式会社安川電機
制御システム、プラントシステム、コントローラ、及び制御方法
3か月前
株式会社安川電機
ロボット制御システム、ロボットコントローラ、及びロボット制御方法
2か月前
株式会社安川電機
搬送ロボットおよびロボットシステム
1か月前
OMC株式会社
ロボット
1か月前
日東精工株式会社
電動ドライバ
3日前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
8日前
株式会社ダイヘン
移動体
6日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
17日前
学校法人五島育英会
アーム機構
8日前
株式会社スター精機
吸着パッド
2日前
株式会社スター精機
吸着パッド
2日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
川崎重工業株式会社
制動システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ