TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067944
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2025020494,2022087041
出願日
2025-02-12,2022-05-27
発明の名称
搬送ロボットおよびロボットシステム
出願人
株式会社安川電機
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
9/06 20060101AFI20250417BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アームの小型化を図ること。
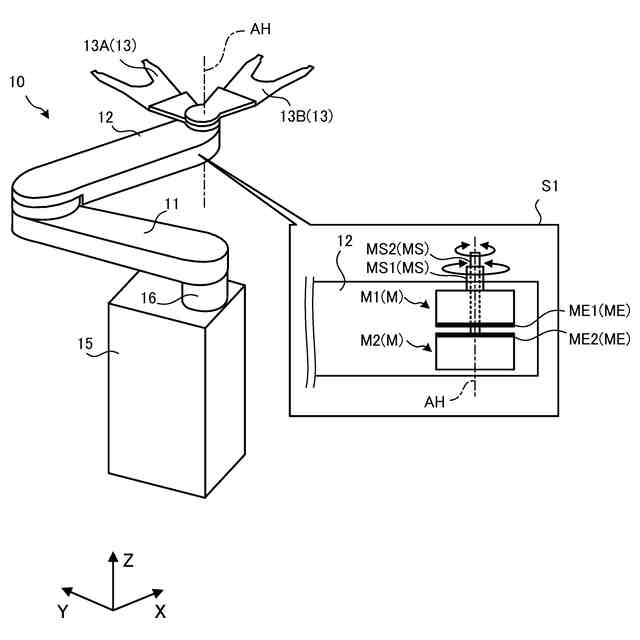
【解決手段】搬送ロボットは、複数のハンドと、複数のハンド駆動モータと、1つのアームとを備える。複数のハンドは、被搬送物を保持可能であり、1つの旋回軸においてそれぞれ旋回する。複数のハンド駆動モータは、旋回軸に沿う向きにおいて、複数のハンドがそれぞれ接続されたモータ軸が旋回軸に対して同心となるように並んで配置され、複数のハンドをそれぞれ直接駆動する。1つのアームは、複数のハンド駆動モータを内蔵する。
【選択図】図1
特許請求の範囲
【請求項1】
被搬送物を保持可能であり、1つの旋回軸においてそれぞれ旋回する複数のハンドと、
前記旋回軸に沿う向きにおいて、前記複数のハンドがそれぞれ接続されたモータ軸が前記旋回軸に対して同心となるように並んで配置され、前記複数のハンドをそれぞれ直接駆動する複数のハンド駆動モータと、
前記複数のハンド駆動モータを内蔵する1つのアームと
を備えることを特徴とする搬送ロボット。
続きを表示(約 1,500 文字)
【請求項2】
前記複数のハンド駆動モータは、
前記モータ軸に沿う向きにおける一方側の面にそれぞれエンコーダを備え、前記エンコーダ同士が対向する姿勢で前記1つのアームに内蔵されること
を特徴とする請求項1に記載の搬送ロボット。
【請求項3】
前記1つのアームは、
複数の前記ハンド側において前記モータ軸に沿って分解可能な複数のサブフレームを有し、
前記複数のサブフレームは、
前記複数のハンド駆動モータをそれぞれ1つずつ内蔵すること
を特徴とする請求項2に記載の搬送ロボット。
【請求項4】
前記複数のサブフレームは、
それぞれが前記複数のハンド側の前記1つのアームの外形を構成する外面を有すること
を特徴とする請求項3に記載の搬送ロボット。
【請求項5】
前記エンコーダは、
前記ハンド駆動モータのロータの端面に固定される円板状のディスク部と、
前記ハンド駆動モータのステータまたは前記アームに固定され、前記ディスク部の端面と端面が対向するとともに、前記円板状の前記ディスク部を等分した半円板状の外形に収まる形状の検知部と
を含み、
前記複数のハンド駆動モータは、
それぞれが備える前記エンコーダ同士について、前記ディスク部の端面同士が前記検知部を挟んで対向し、かつ、前記検知部の側面同士が前記モータ軸を挟んで対向する姿勢で、前記1つのアームに内蔵されること
を特徴とする請求項2に記載の搬送ロボット。
【請求項6】
前記ハンド駆動モータは、
ロータに接続され、前記モータ軸に沿って延伸された中空シャフトを含み、いずれかの前記ハンド駆動モータの前記中空シャフトが、他の前記中空シャフトに挿入された姿勢で、前記1つのアームに内蔵されること
を特徴とする請求項1に記載の搬送ロボット。
【請求項7】
外側の前記中空シャフトが上側の前記ハンドを旋回させ、内側の前記中空シャフトが下側の前記ハンドを旋回させること
を特徴とする請求項6に記載の搬送ロボット。
【請求項8】
前記ハンド駆動モータは、
アキシャルギャップ型のモータであること
を特徴とする請求項1~7のいずれか一つに記載の搬送ロボット。
【請求項9】
前記ハンド駆動モータは、
前記モータ軸に沿う中空部を有する円板状のステータと、
前記ステータの端面と端面が対向し、前記中空部を有する円板状のロータと、
前記ロータの前記中空部と連通するように前記ロータに接続され、前記モータ軸に沿って延伸された中空シャフトと
を備えることを特徴とする請求項8に記載の搬送ロボット。
【請求項10】
複数の前記ハンド駆動モータの少なくとも1つは、
前記中空シャフトが当該ハンド駆動モータにおける前記ステータの中空部を貫通して延伸され、
その他の前記ハンド駆動モータの少なくとも1つは、
前記中空シャフトが当該ハンド駆動モータにおける前記ステータから離れる向きに延伸され、
前記ステータから離れる向きに延伸された前記中空シャフトが、前記ステータの中空部を貫通して延伸された前記中空シャフトを貫通する姿勢で、前記1つのアームに内蔵されること
を特徴とする請求項9に記載の搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、搬送ロボットおよびロボットシステムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、被搬送物を保持するハンドを移動させることで被搬送物を搬送する水平多関節ロボットなどの搬送ロボットが知られている。
【0003】
また、搬送ロボットのアームを小型化するために、アーム一体型のビルトインモータを採用した搬送ロボットも提案されている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2020-11303号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記した従来技術では、モータと、モータの駆動力をハンドへ伝達するベルトとを、ハンドを支持するアームに内蔵しており、アームの小型化の観点からは改善の余地がある。
【0006】
実施形態の一態様は、アームの小型化を図ることができる搬送ロボットおよびロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
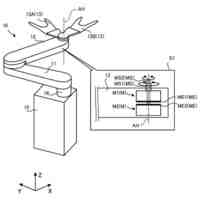
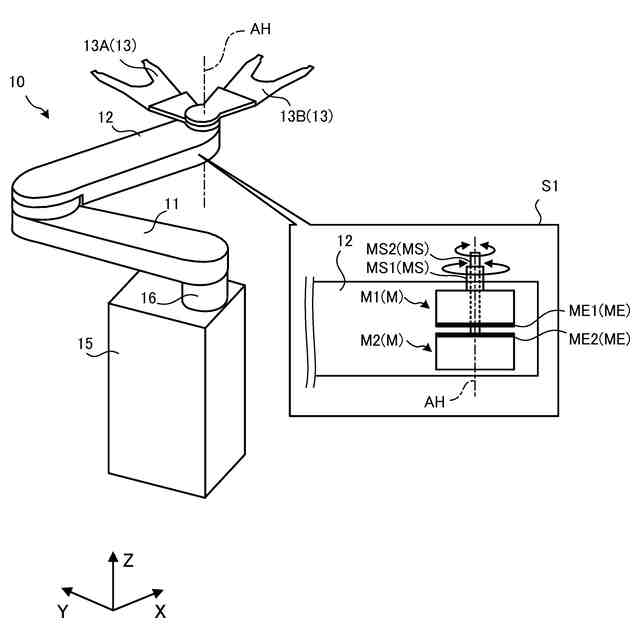
実施形態の一態様に係る搬送ロボットは、複数のハンドと、複数のハンド駆動モータと、1つのアームとを備える。複数のハンドは、被搬送物を保持可能であり、1つの旋回軸においてそれぞれ旋回する。複数のハンド駆動モータは、前記旋回軸に沿う向きにおいて、前記複数のハンドがそれぞれ接続されたモータ軸が前記旋回軸に対して同心となるように並んで配置され、前記複数のハンドをそれぞれ直接駆動する。1つのアームは、前記複数のハンド駆動モータを内蔵する。
【0008】
実施形態の一態様に係るロボットシステムは、上記した搬送ロボットと、制御装置とを備える。制御装置は、前記搬送ロボットの動作を制御する。
【発明の効果】
【0009】
実施形態の一態様によれば、アームの小型化を図ることができる搬送ロボットおよびロボットシステムを提供することができる。
【図面の簡単な説明】
【0010】
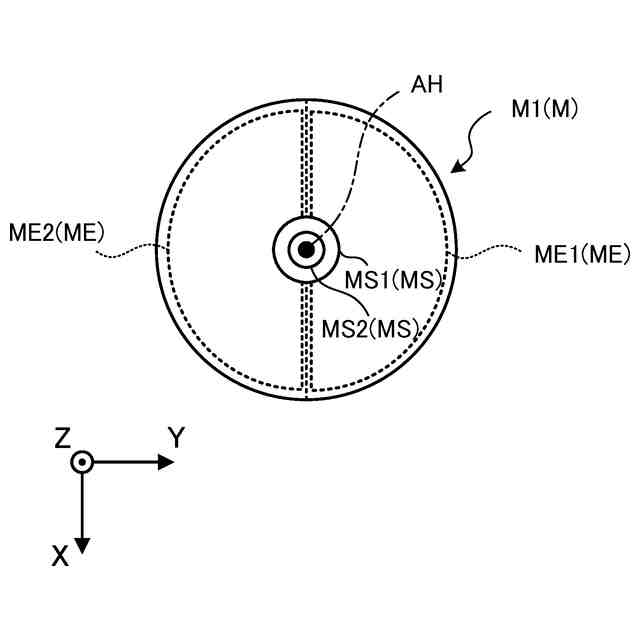
図1は、搬送ロボットの概要を示す模式図である。
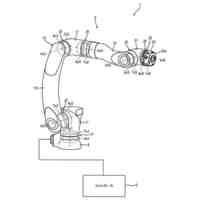
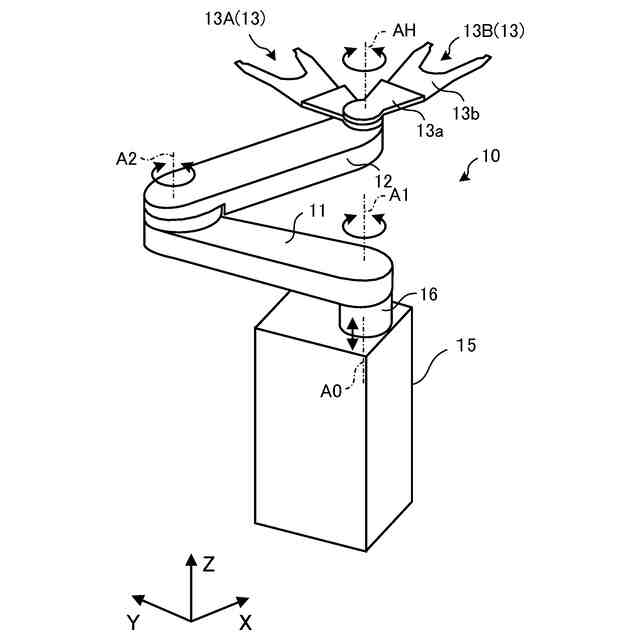
図2は、搬送ロボットの斜視図である。
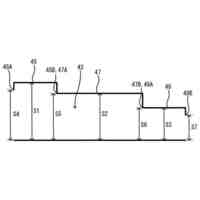
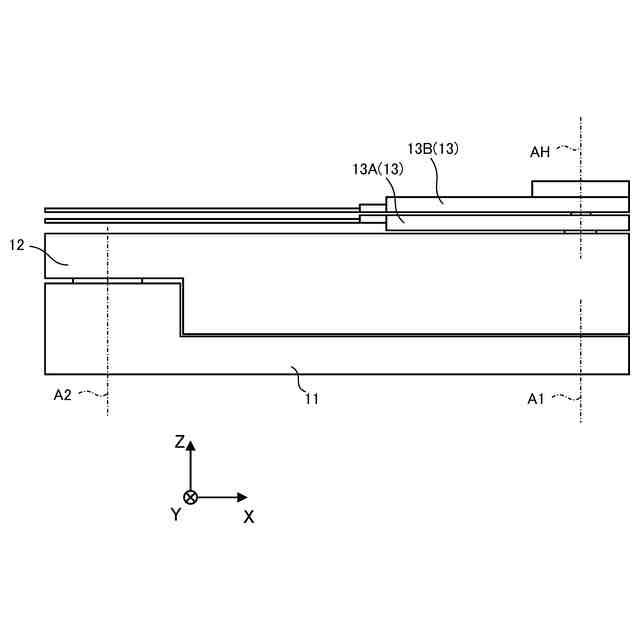
図3は、第1アーム、第2アームおよびハンドの側面模式図である。
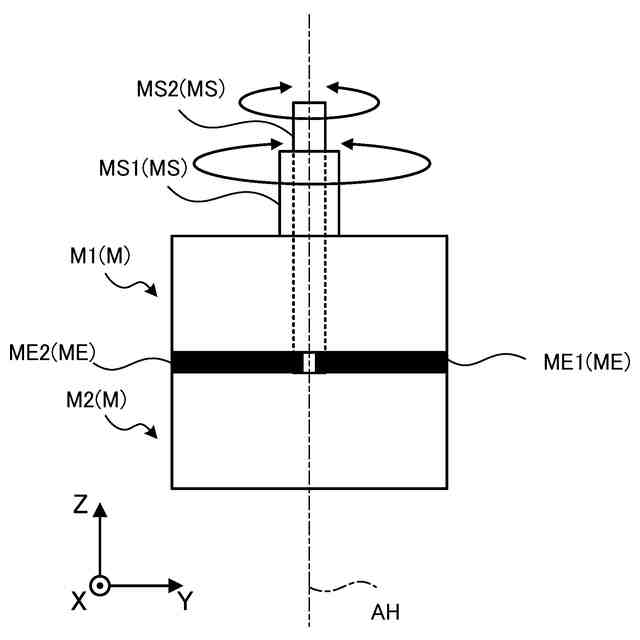
図4Aは、複数のハンド駆動モータを組み合わせた状態の側面模式図である。
図4Bは、複数のハンド駆動モータを組み合わせた状態の上面模式図である。
図5Aは、モータ内蔵のサブフレームを示す側面模式図である。
図5Bは、組立後のアームを示す側面模式図である。
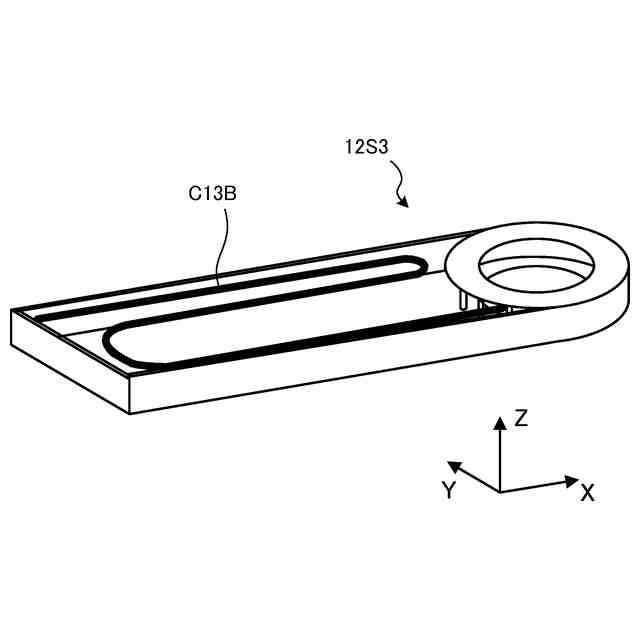
図6は、モータを内蔵しないサブフレームを示す斜視模式図である。
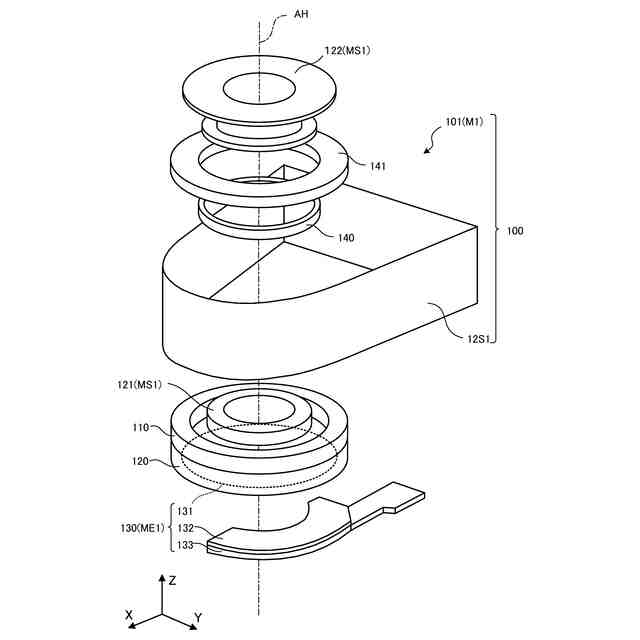
図7は、第1モータユニットの分解斜視図である。
図8は、第2モータユニットの分解斜視図である。
図9は、組立後の第2アームの側断面模式図である。
図10は、ロボットシステムのブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
制御装置及び制御装置の冷却方法
29日前
株式会社安川電機
ロボットシステム、ロボット、ロボットの制御方法
11日前
株式会社安川電機
搬送ロボットおよびロボットシステム
1か月前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
1日前
株式会社不二越
ロボット
29日前
トヨタ自動車株式会社
関節機構
3日前
株式会社エビス
腰ベルト用連結具
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
東京都公立大学法人
対象物把持装置
12日前
学校法人五島育英会
アーム機構
3日前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
庄内機械株式会社
釘打装置
16日前
住友重機械工業株式会社
ロボット
23日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社アイエイアイ
グリッパー
18日前
株式会社PILLAR
チューブ保持治具
8日前
川崎重工業株式会社
制動システム
29日前
株式会社不二越
垂直多関節ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
11日前
株式会社リコー
多関節ロボット
2日前
芝浦機械株式会社
双腕ロボット
22日前
株式会社マキタ
電動作業機
4日前
株式会社マキタ
電動作業機
4日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車東日本株式会社
搬送治具
16日前
トヨタ自動車株式会社
荷姿影響緩和方法
19日前
株式会社ダイヘン
ロボット制御システム
1日前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
住友重機械工業株式会社
ロボット及びカバー
23日前
アピュアン株式会社
エアー式衝撃工具
1か月前
個人
回転移動式工具ホルダ
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ