TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025051951
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023160720
出願日
2023-09-25
発明の名称
ロボットシステム、及び折り畳み方法
出願人
株式会社デンソーウェーブ
代理人
弁理士法人サトー
主分類
B25J
15/06 20060101AFI20250328BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】汎用性が高くかつ簡易な構成でシート部材の折り畳みを自動化する。
【解決手段】ロボットシステムは、長尺のシート部材を順次折り畳んで積み重ねるためのロボットシステムである。ロボットシステムは、シート部材を吸着する吸着装置を備えるロボットアームと、制御装置と、を備え、制御装置は、ロボットアームを動作させて吸着装置によりシート部材の上面における吸着位置を吸着する処理と、ロボットアームを動作させて吸着装置に吸着された状態のシート部材を持ち上げる処理と、ロボットアームを動作させて持ち上げられたシート部材を所定位置まで搬送方向に移動させてシート部材が上下に重なって折り畳まれた状態で吸着装置を下方に移動してシート部材に折り目を付ける処理と、ロボットアームを動作させて折り目が付いたシート部材から吸着装置を離す処理と、を順に実行する。
【選択図】図2
特許請求の範囲
【請求項1】
長尺のシート部材を順次折り畳んで積み重ねるためのロボットシステムであって、
前記シート部材を吸着する吸着装置を備えるロボットアームと、
前記ロボットアームを制御する制御装置と、を備え、
前記制御装置は、
前記ロボットアームを動作させて前記吸着装置により前記シート部材の上面における吸着位置を吸着する処理と、
前記ロボットアームを動作させて前記吸着装置に吸着された状態の前記シート部材を持ち上げる処理と、
前記ロボットアームを動作させて持ち上げられた前記シート部材を所定位置まで搬送方向に移動させて前記シート部材が上下に重なって折り畳まれた状態で前記吸着装置を下方に移動して前記シート部材に折り目を付ける処理と、
前記ロボットアームを動作させて前記折り目が付いた前記シート部材から前記吸着装置を離す処理と、を順に実行する、
ロボットシステム。
続きを表示(約 580 文字)
【請求項2】
前記シート部材を持ち上げる処理は、前記吸着装置を傾斜させて前記シート部材の搬送方向とは反対方向の斜め上方に前記シート部材を持ち上げる処理を含む、
請求項1に記載のロボットシステム。
【請求項3】
前記シート部材の吸着位置を吸着する処理は、前記吸着位置の基準となる基準位置を検知可能な検知装置の検知結果に基づいて、前記吸着位置に前記吸着装置を移動させる処理を含む、
請求項1又は2に記載のロボットシステム。
【請求項4】
吸着装置を備えるロボットアームを用いて、長尺のシート部材を順次折り畳んで積み重ねる折り畳み方法であって、
前記ロボットアームを動作させて前記吸着装置により前記シート部材の上面における吸着位置を吸着する処理と、
前記ロボットアームを動作させて前記吸着装置で吸着された状態の前記シート部材を持ち上げる処理と、
前記ロボットアームを動作させて持ち上げられた前記シート部材を所定位置まで搬送方向に移動させて前記シート部材が上下に重なって折り畳まれた状態で前記吸着装置を下方に移動して前記シート部材に折り目を付ける処理と、
前記ロボットアームを動作させて前記折り目が付いた前記シート部材から前記吸着装置を離す処理と、を順に実行する、
折り畳み方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム、及び折り畳み方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、専用機を用いてビニール袋を折り畳んで積層する技術が知られている。従来構成では、搬送装置部を用いてビニール袋を積層コンベヤの上部に均一の長さで折り畳んで積み重ねることにより品質を高め、しかも、引出加圧部を用いて積み重ねられたビニール袋を排出コンベヤに移載して排出する過程を自動化させることにより生産性を高めることが図られている。
【先行技術文献】
【特許文献】
【0003】
特表2012-533493号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、専用機を導入するためには、大掛かりな設備投資が必要となる。また、例えばビニール袋等が連続して構成されたシート部材を製造する業者が、必ずしも専用機の導入に適した工場棟を備えているとは限らないため、より汎用性が高くかつ簡易な構成でシート部材の折り畳みを自動化できる形態が求められていた。
【0005】
本発明は上記した事情に鑑みてなされたものであり、その目的は、汎用性が高くかつ簡易な構成でシート部材の折り畳みを自動化できる技術を提供することにある。
【課題を解決するための手段】
【0006】
実施形態のロボットシステムは、長尺のシート部材を順次折り畳んで積み重ねるためのロボットシステムである。ロボットシステムは、前記シート部材を吸着する吸着装置を備えるロボットアームと、前記ロボットアームを制御する制御装置と、を備え、前記制御装置は、前記ロボットアームを動作させて前記吸着装置により前記シート部材の上面における吸着位置を吸着する処理と、前記ロボットアームを動作させて前記吸着装置に吸着された状態の前記シート部材を持ち上げる処理と、前記ロボットアームを動作させて持ち上げられた前記シート部材を所定位置まで搬送方向に移動させて前記シート部材が上下に重なって折り畳まれた状態で前記吸着装置を下方に移動して前記シート部材に折り目を付ける処理と、前記ロボットアームを動作させて前記折り目が付いた前記シート部材から前記吸着装置を離す処理と、を順に実行する。
【図面の簡単な説明】
【0007】
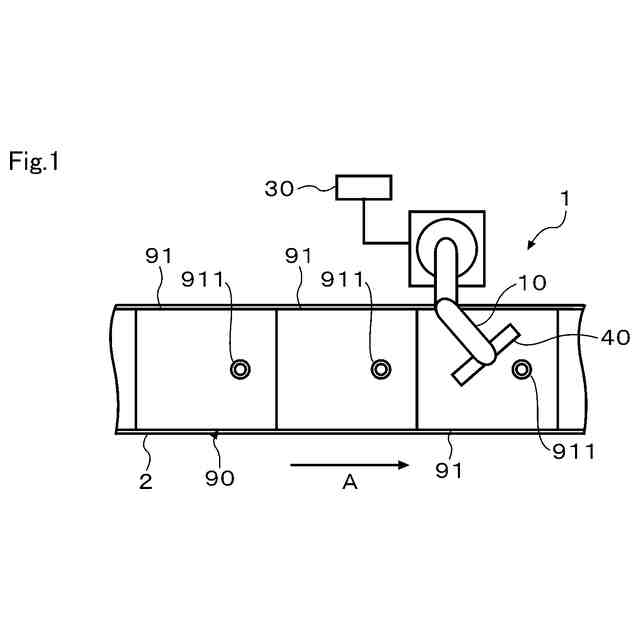
一実施形態によるロボットシステムの構成の一例を概略的に示す図
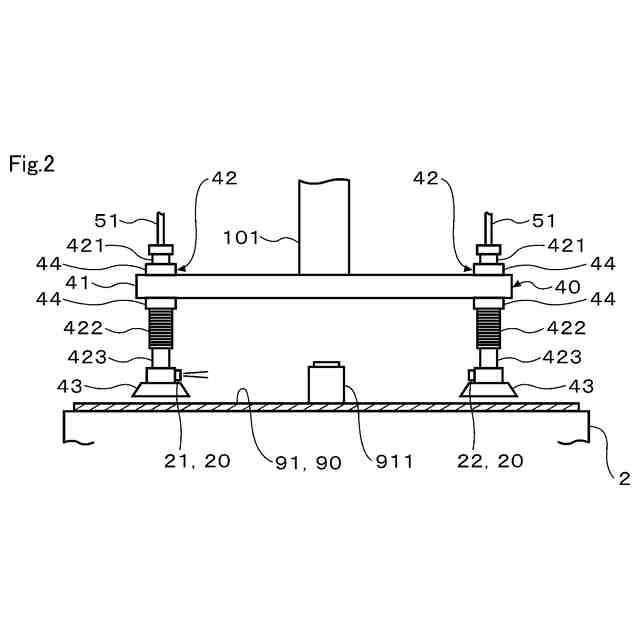
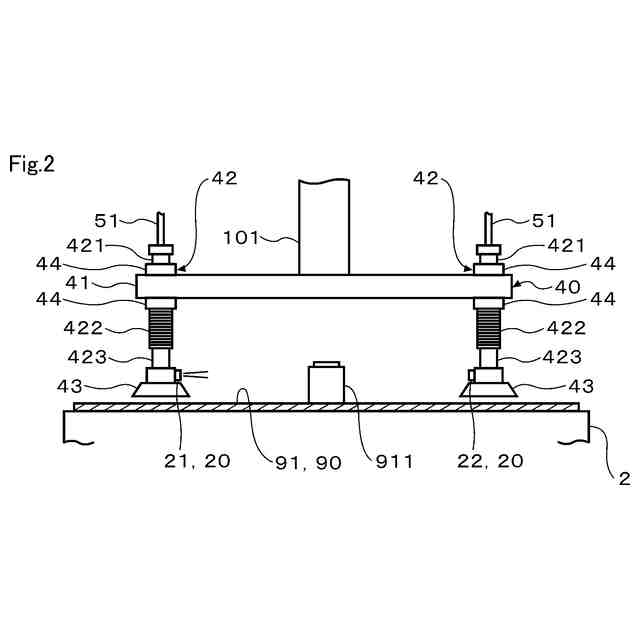
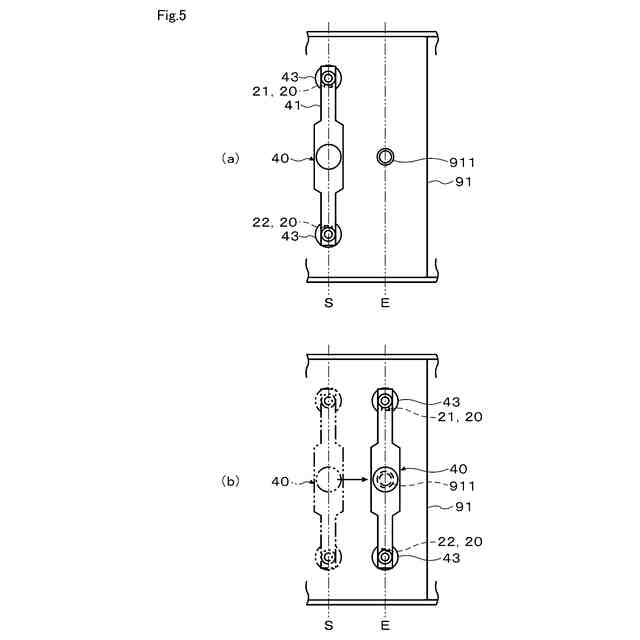
一実施形態によるロボットシステムについて、吸着装置及び検知装置の構成の一例を概略的に示す図
一実施形態によるロボットシステムの制御装置で実行される制御の一例を示すフローチャート
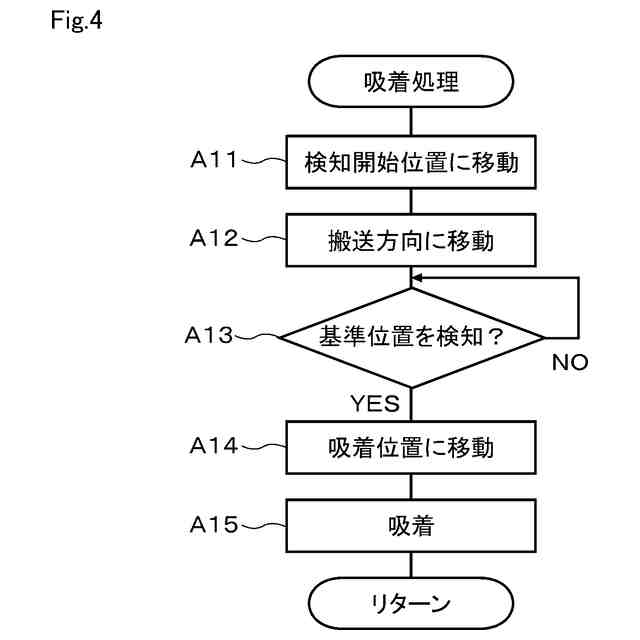
一実施形態によるロボットシステムにおける吸着処理の制御内容の一例を示すフローチャート
一実施形態によるロボットシステムにおいて、吸着処理を実行した際の動作の一例を示す図
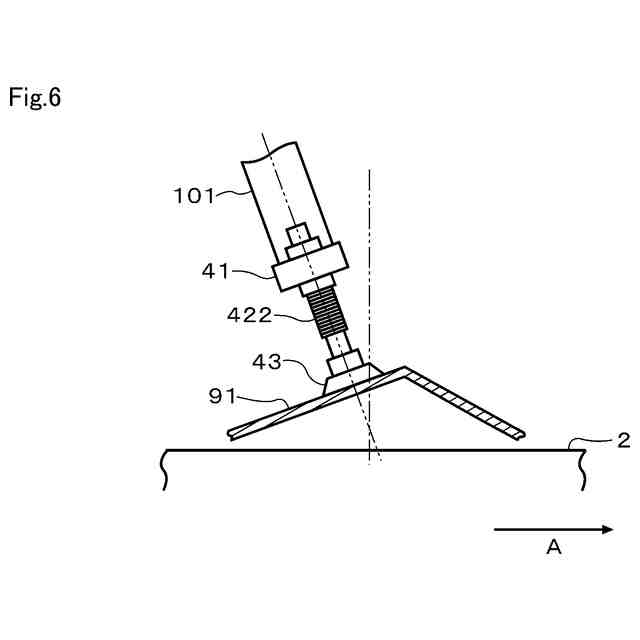
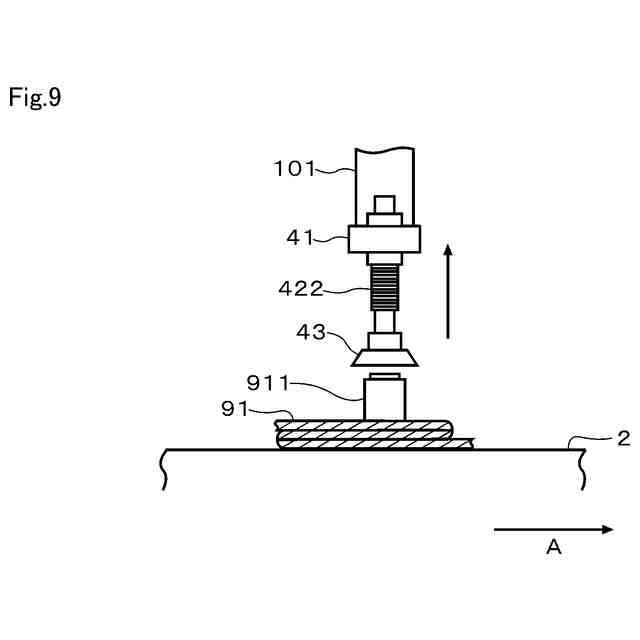
一実施形態によるロボットシステムにおいて、持ち上げ処理を実行した際の動作の一例を示す図
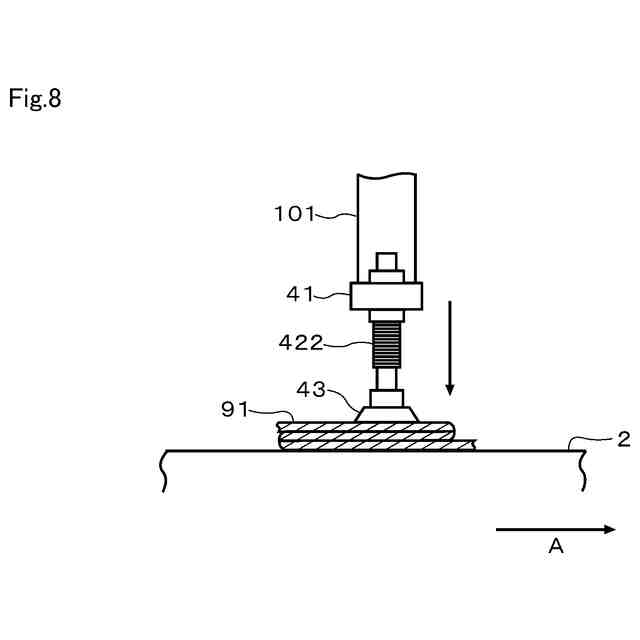
一実施形態によるロボットシステムにおいて、移動処理を実行した際の動作の一例を示す図(その1)
一実施形態によるロボットシステムにおいて、移動処理を実行した際の動作の一例を示す図(その2)
一実施形態によるロボットシステムにおいて、排出処理を実行した際の動作の一例を示す図
【発明を実施するための形態】
【0008】
以下、本発明の実施形態によるロボットシステムについて、図面を参照しながら説明する。なお、本明細書では、ロボットシステムを単にシステムと称する場合がある。
図1に示すシステム1は、ロボットアーム10を用いて長尺のシート部材90を順次折り畳んで積み重ねるためのシステムである。シート部材90は、複数のシート体91が連続して繋がって形成されている。複数のシート体91は、例えば定尺で構成されている。
【0009】
シート体91は、例えば医療用のパウチ袋が厚み方向に圧縮されてシート状に構成されている。医療用のパウチ袋とは、内部に栄養液等の液状物が収容された容器として用いられるものを意味する。シート体91は、例えばナイロン袋やアルミ蒸着袋等であって、ガスバリア性を有する。また、シート体91は、口栓911を有している。口栓911は、シート体91の注ぎ口として機能する。口栓911は、図示しないキャップを含んで構成できる。口栓911は、シート体91の長手方向の一方の端部寄りであって、幅方向の略中心に設けられている。
【0010】
システム1は、載置台2、ロボットアーム10、検知装置20、及び制御装置30を備えている。載置台2は、図示しない脚部を有しており、設置面に固定されている。載置台2は、シート部材90を水平状態で載置可能である。この場合、シート部材90が載置台2に載置された状態で、シート体91の口栓911は上方を向くように配置される。載置台2は、例えば搬送機構を有し、シート部材90を所定のピッチで搬送するベルトコンベア等で構成してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
12日前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
5日前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
1か月前
個人
深孔スリーブ駆動ロッド構造
25日前
株式会社エビス
腰ベルト用連結具
12日前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
個人
バール
25日前
工機ホールディングス株式会社
作業機
20日前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社デンソー
操縦桿
1か月前
梅馨堂合同会社
人協働ロボットシステム
27日前
株式会社不二越
基板搬送用ロボット
1か月前
ARMA株式会社
UI付エンドエフェクタ
28日前
株式会社デンソーウェーブ
ロボット制御システム
18日前
アピュアン株式会社
エアー式衝撃工具
15日前
株式会社マキタ
作業機
1か月前
学校法人法政大学
装着型アシスト装置
22日前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
三菱電機株式会社
トルク締め個所検出システム
25日前
株式会社マキタ
インパクト工具
13日前
株式会社マキタ
インパクト工具
13日前
高丸工業株式会社
ロボット操作システムの動作方法
25日前
中国電力株式会社
電動ドライバー
19日前
株式会社不二越
ロボットの教示システム及び教示方法
19日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
SB C&S株式会社
治具セット
12日前
株式会社デンソー
解体装置および解体プログラム
1か月前
株式会社ベッセル工業
インパクト工具
1か月前
オムロン株式会社
モバイルロボット
19日前
JUKI株式会社
ハンドリング装置
27日前
株式会社デンソー
作業装置および作業プログラム
1か月前
オムロン株式会社
モバイルロボット
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ