TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065854
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023175340
出願日
2023-10-10
発明の名称
ロボット制御装置、ロボット制御方法、記憶媒体
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20250415BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットによる容器への被収容物の収容作業を効率化できるロボット制御装置等を提供する。
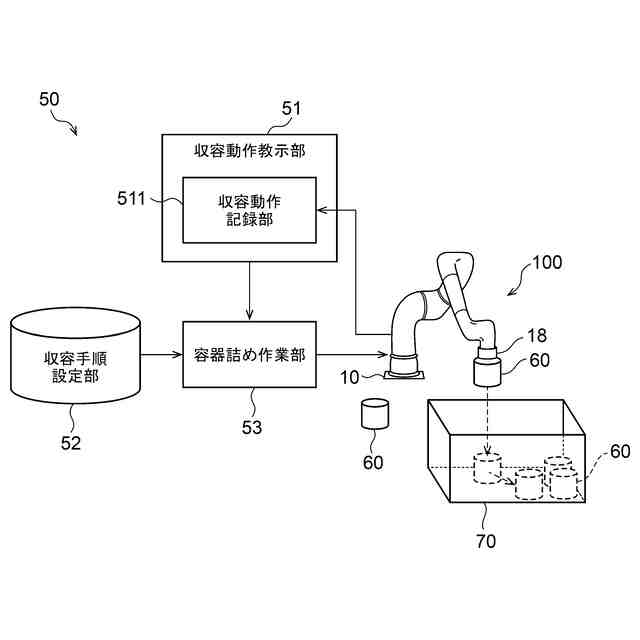
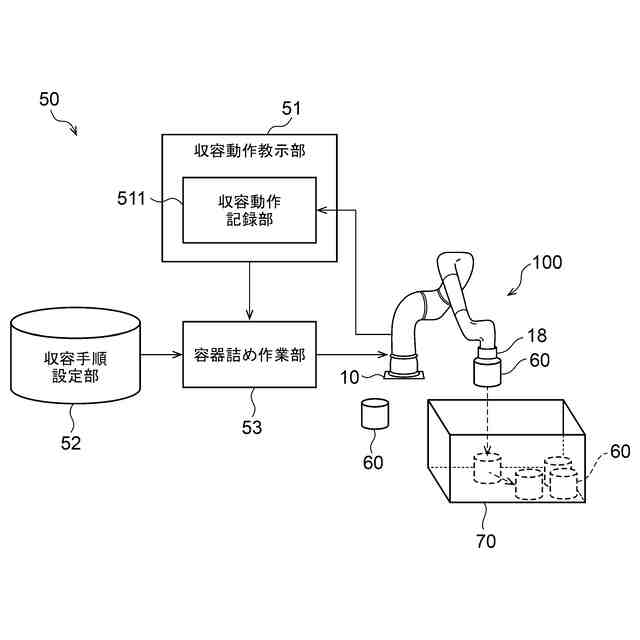
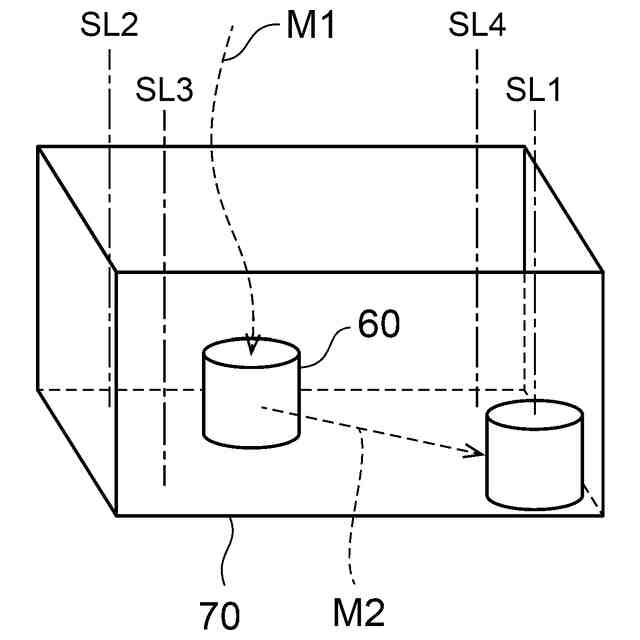
【解決手段】ロボット制御装置50は、容器70内における特定の基準収容場所に被収容物60を収容する収容動作をロボットアーム100に教示する収容動作教示部51と、収容動作を学習したロボットアーム100に、容器70内における基準収容場所と異なる複数の収容場所に複数の被収容物60を詰めさせる容器詰め作業部53と、を備える。基準収容場所は、容器70の内壁に面した場所を含み、収容動作教示部51がロボットアーム100に教示する収容動作は、被収容物60を内壁に接触させる接触動作を含み、容器詰め作業部53は、接触動作を学習したロボットアーム100に、複数の被収容物60のそれぞれを内壁および容器70内に収容済の既存の被収容物60の少なくともいずれかに接触させて詰めさせる。
【選択図】図4
特許請求の範囲
【請求項1】
容器内における特定の基準収容場所に被収容物を収容する収容動作をロボットに教示する収容動作教示部と、
前記収容動作を学習した前記ロボットに、前記容器内における前記基準収容場所と異なる複数の収容場所に複数の被収容物を詰めさせる容器詰め作業部と、
を備えるロボット制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記基準収容場所は、前記容器の内壁に面した場所を含み、
前記収容動作教示部が前記ロボットに教示する前記収容動作は、前記被収容物を前記内壁に接触させる接触動作を含み、
前記容器詰め作業部は、前記接触動作を学習した前記ロボットに、前記複数の被収容物のそれぞれを前記内壁および前記容器内に収容済の既存の被収容物の少なくともいずれかに接触させて詰めさせる、
請求項1に記載のロボット制御装置。
【請求項3】
前記容器および前記被収容物は、略直方体状であり、
前記基準収容場所は、前記容器の隅に面した場所を含み、
前記収容動作教示部が前記ロボットに教示する前記接触動作は、前記被収容物を前記隅に面する二つの内壁に接触させる動作を含む、
請求項2に記載のロボット制御装置。
【請求項4】
前記基準収容場所は、前記容器の対角上の二つの隅に面した場所を含む、請求項3に記載のロボット制御装置。
【請求項5】
前記基準収容場所は、前記容器の四つの隅に面した場所を含む、請求項4に記載のロボット制御装置。
【請求項6】
前記基準収容場所は、前記隅に面した場所のみを含む、請求項3から5のいずれかに記載のロボット制御装置。
【請求項7】
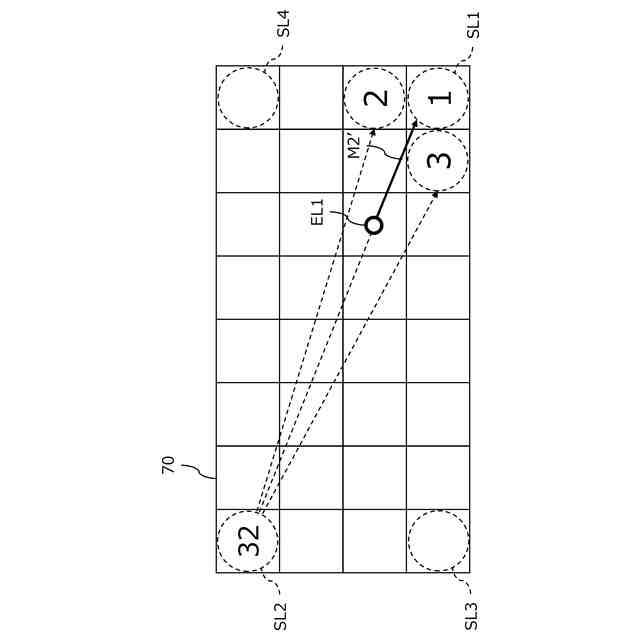
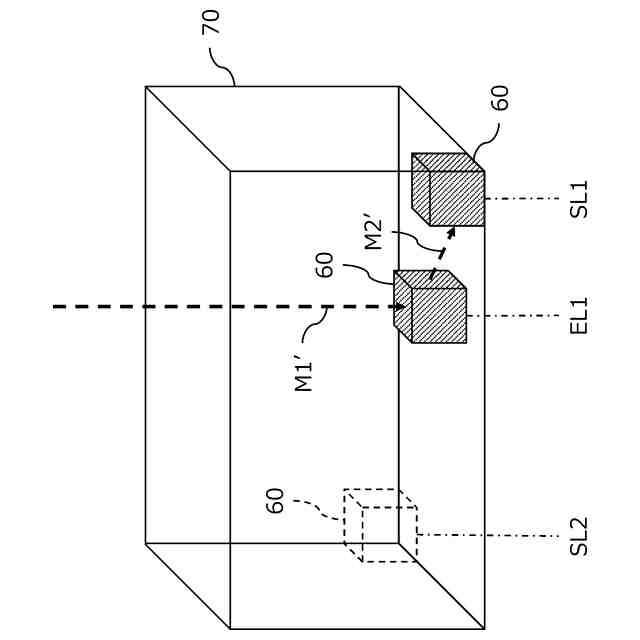
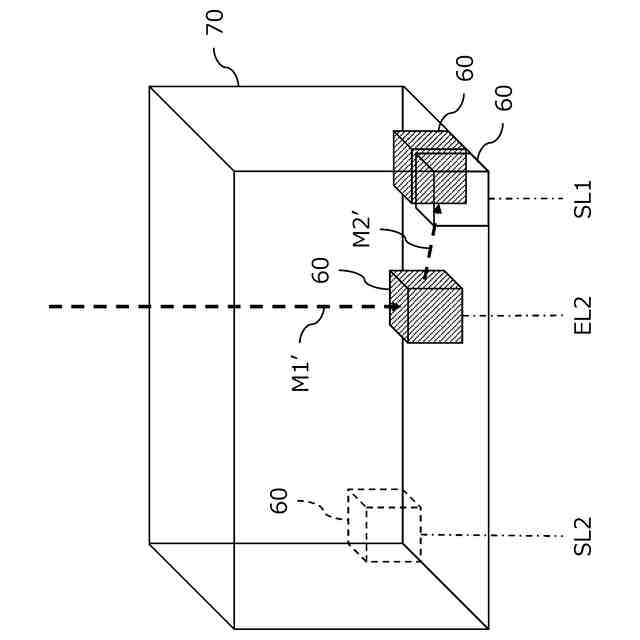
前記容器詰め作業部は、前記収容動作を学習した前記ロボットに、前記基準収容場所に最初の被収容物を収容させた後、当該基準収容場所に隣接する他の収容場所に他の被収容物を前記最初の被収容物に接触させて詰めさせる、請求項2から5のいずれかに記載のロボット制御装置。
【請求項8】
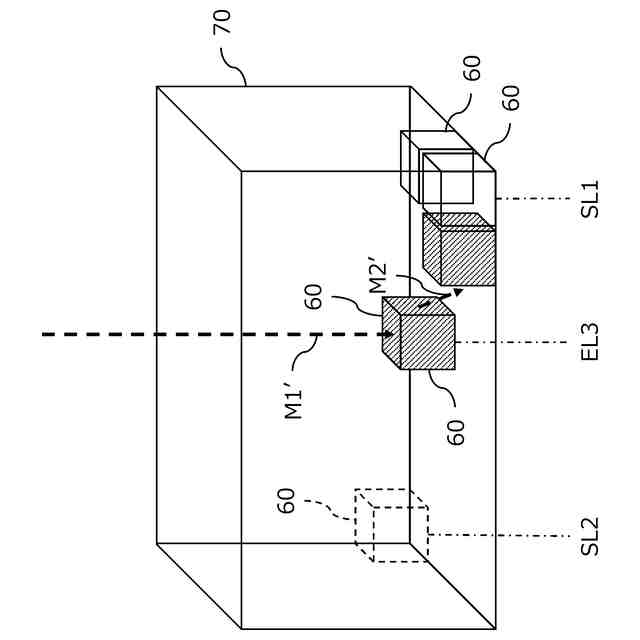
前記容器詰め作業部は、前記収容動作を学習した前記ロボットに、前記複数の被収容物のそれぞれを、前記内壁および前記既存の被収容物と接触しない場所において前記容器内に進入させ、当該進入場所から前記内壁および前記既存の被収容物の少なくともいずれかに向かって移動させる、請求項2から5のいずれかに記載のロボット制御装置。
【請求項9】
前記容器詰め作業部は、前記接触動作を学習した前記ロボットに、前記複数の被収容物のそれぞれを前記既存の被収容物に接触させる際に、当該既存被収容物に向かって下方に傾斜させる、請求項2から5のいずれかに記載のロボット制御装置。
【請求項10】
前記収容動作教示部は、作業者が前記ロボットを直接的に動かすダイレクトティーチングを通じて、前記収容動作を当該ロボットに教示する、請求項1から5のいずれかに記載のロボット制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御装置等に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
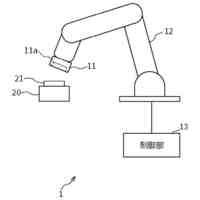
工場、物流倉庫、建設現場、病院等の産業現場において、人間の代わりに各種の作業を行う産業用ロボットが導入されている。従来の産業用ロボットは大型で高出力のものが多く、安全のために人間が入れない隔離空間を設けて作業を行わせる必要があった。一方、近年では人間と同じ空間で一緒に作業を行う協働ロボットの導入も進んでいる。従来の産業用ロボットと比べて小型の協働ロボットは、狭いスペースに設置可能であり低出力であることから、安全確保のための大がかりなシステムを必要としない。特許文献1には、多数のワークを梱包箱に詰める作業を行うロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-43322号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されている梱包箱には、ワークの下端部を受け入れるための整列した複数のワーク挿入穴と、ワークの上部と当接して倒れを防止するための上部仕切り板を挿入するための挿入溝が設けられる。しかし、ロボットによる収容作業または箱詰め作業が求められる容器または梱包箱は、ワーク挿入穴や挿入溝等の特殊な補助構造を有するものとは限らない。
【0005】
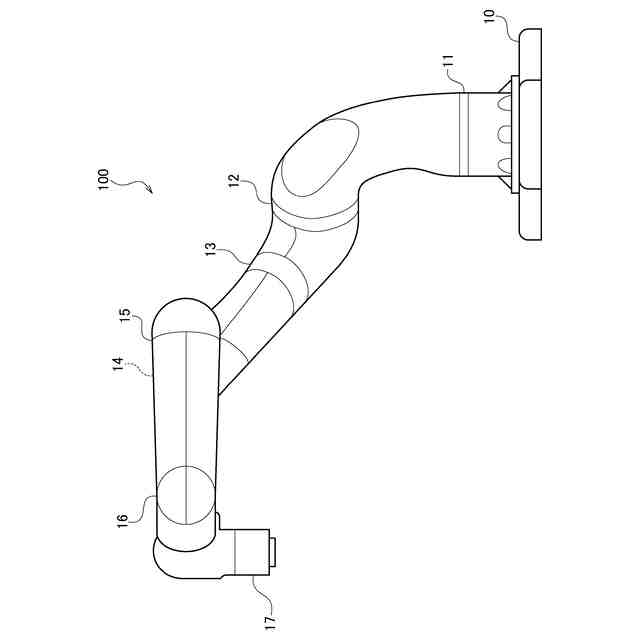
本開示はこうした状況に鑑みてなされたものであり、ロボットによる容器への被収容物の収容作業を効率化できるロボット制御装置等を提供することを目的とする。なお、以上では協働ロボットを例示したが、本開示は協働ロボットに限定されない一般的な産業用ロボットとしてのロボットアーム等にも適用可能である。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本開示のある態様のロボット制御装置は、容器内における特定の基準収容場所に被収容物を収容する収容動作をロボットに教示する収容動作教示部と、収容動作を学習したロボットに、容器内における基準収容場所と異なる複数の収容場所に複数の被収容物を詰めさせる容器詰め作業部と、を備える。
【0007】
本態様では、容器内における特定の基準収容場所に被収容物を収容する収容動作を学習したロボットによって、容器内における基準収容場所と異なる複数の収容場所に複数の被収容物を効率的に詰められる。
【0008】
本開示の別の態様は、ロボット制御方法である。この方法は、容器内における特定の基準収容場所に被収容物を収容する収容動作をロボットに教示することと、収容動作を学習したロボットに、容器内における基準収容場所と異なる複数の収容場所に複数の被収容物を詰めさせることと、を実行する。
【0009】
本開示の更に別の態様は、記憶媒体である。この記憶媒体は、容器内における特定の基準収容場所に被収容物を収容する収容動作をロボットに教示することと、収容動作を学習したロボットに、容器内における基準収容場所と異なる複数の収容場所に複数の被収容物を詰めさせることと、をコンピュータに実行させるロボット制御プログラムを記憶している。
【0010】
なお、以上の構成要素の任意の組合せや、これらの表現を方法、装置、システム、記録媒体、コンピュータプログラム等に変換したものも、本開示に包含される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
10日前
川崎重工業株式会社
ハンド
1か月前
株式会社アイセイ
搬送装置
1か月前
株式会社クレスコ
補助吸着具
3日前
国立大学法人金沢大学
ロボット
1か月前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
株式会社不二越
ロボット操作装置
1か月前
個人
深孔スリーブ駆動ロッド構造
23日前
株式会社エビス
腰ベルト用連結具
10日前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
工機ホールディングス株式会社
作業機
18日前
株式会社デンソー
操縦桿
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
日本信号株式会社
作業機制御システム
2か月前
個人
バール
23日前
梅馨堂合同会社
人協働ロボットシステム
25日前
株式会社マキタ
集塵アタッチメント
2か月前
アピュアン株式会社
衝撃工具
1か月前
株式会社不二越
基板搬送用ロボット
1か月前
ARMA株式会社
UI付エンドエフェクタ
26日前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
株式会社コスメック
把持装置
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
株式会社不二越
ロボットビジョンシステム
1か月前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社デンソーウェーブ
ロボット制御システム
16日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ