TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065739
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023175145
出願日
2023-10-10
発明の名称
連続体ロボット装置および把持装置
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250415BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 姿勢維持性を高めた連続体ロボット装置を提供する。
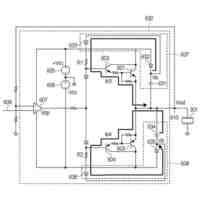
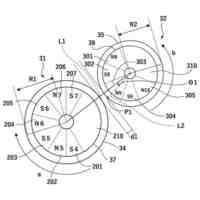
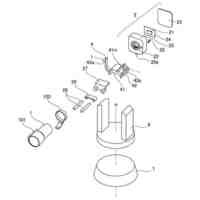
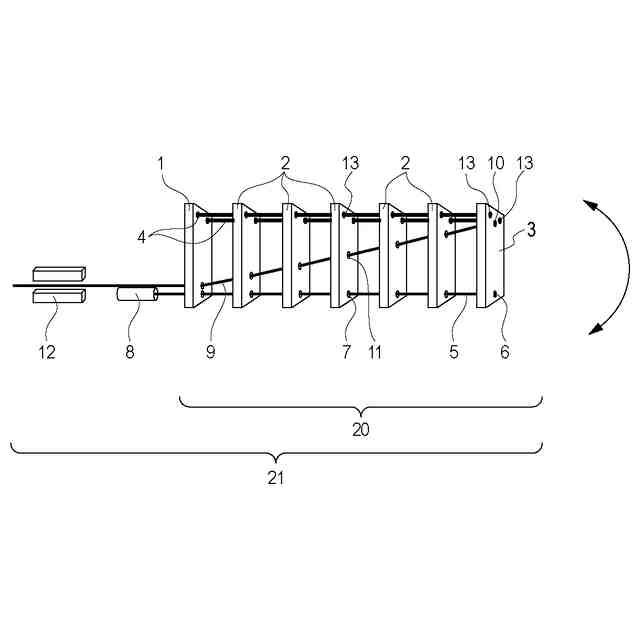
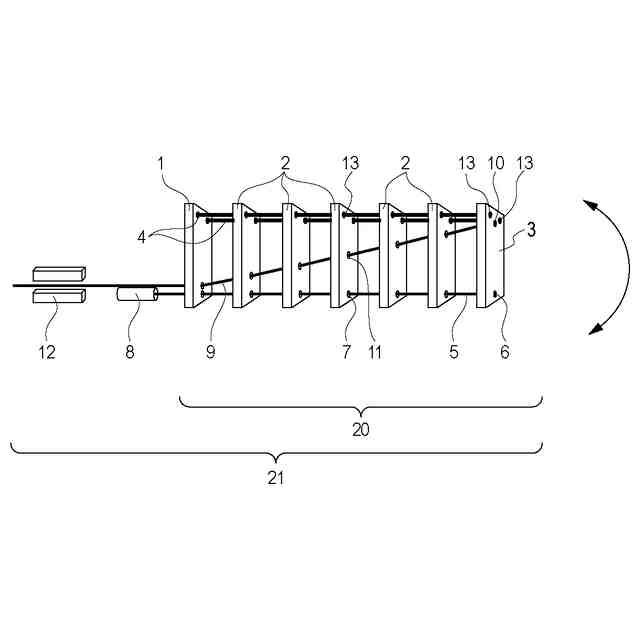
【解決手段】 上記課題を解決するため本発明は、基台と、前記基台によって支持され、第一のワイヤおよび第二のワイヤがそれぞれ配設された第一の湾曲部と、前記第一のワイヤおよび前記第二のワイヤの少なくとも一方を駆動する駆動部と、を備える連続体ロボット装置であって、前記第二のワイヤの一部は、前記第一のワイヤの長手方向に沿って交差する方向に延在し、かつ前記第二のワイヤの長手方向に対して直交する方向の移動が制限されるよう拘束されており、前記第一のワイヤおよび前記第二のワイヤの少なくとも一方のワイヤは前記駆動部が駆動し、他方のワイヤは固定手段によって前記第一の湾曲部に対して固定されていることを特徴とする連続体ロボット装置を提供する。
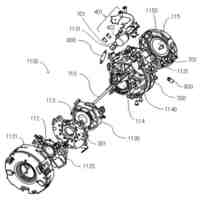
【選択図】 図1
特許請求の範囲
【請求項1】
基台と、
前記基台によって支持され、第一のワイヤおよび第二のワイヤがそれぞれ配設された第一の湾曲部と、
前記第一のワイヤおよび前記第二のワイヤの少なくとも一方を駆動する駆動部と、
を備える連続体ロボット装置であって、
前記第二のワイヤの一部は、前記第一のワイヤの長手方向に沿って交差する方向に延在し、かつ前記第二のワイヤの長手方向に対して直交する方向の移動が制限されるよう拘束されており、
前記第一のワイヤおよび前記第二のワイヤの少なくとも一方のワイヤは前記駆動部が駆動し、他方のワイヤは固定手段によって前記第一の湾曲部に対して固定されていることを特徴とする連続体ロボット装置。
続きを表示(約 880 文字)
【請求項2】
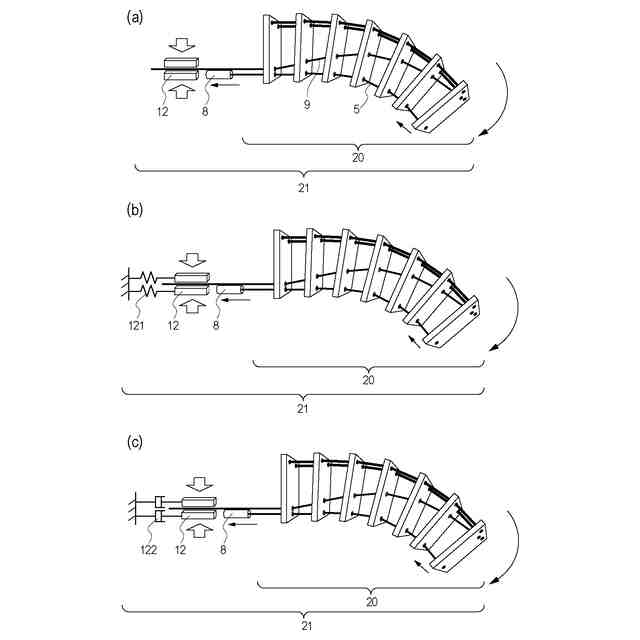
前記駆動部が駆動している最中は、前記固定手段は前記他方のワイヤの固定を開放し、
前記駆動部が停止している最中は、前記固定手段は前記他方のワイヤを固定するように動作する切替え手段を有することを特徴とする請求項1に記載の連続体ロボット装置。
【請求項3】
前記第一の湾曲部の長手方向に対して交差する方向における、前記第一のワイヤと前記第二のワイヤの距離が、長手方向に沿って単調に変化する部位を備えることを特徴とする請求項1または2に記載の連続体ロボット装置。
【請求項4】
前記一方のワイヤは、独立に駆動可能な複数のワイヤであり、前記一方のワイヤをそれぞれ駆動する複数の前記駆動部に接続されていることを特徴とする請求項1または2に記載の連続体ロボット装置。
【請求項5】
前記他方のワイヤは、独立に駆動可能な複数のワイヤであり、前記他方のワイヤをそれぞれ固定する複数の前記固定手段を備えることを特徴とする請求項1または2に記載の連続体ロボット装置。
【請求項6】
前記第一の湾曲部は、間隔を置いて配され、前記第一のワイヤおよび前記第二のワイヤが貫いた複数の中間部材を備えている請求項1または2に記載の連続体ロボット装置。
【請求項7】
前記中間部材のうち少なくとも一つは、スリットが設けられており、前記スリットを介して前記固定手段に接続されているワイヤが貫いていることを特徴とする請求項1または2に記載の連続体ロボット装置。
【請求項8】
共通の前記基台に対して、請求項1または2に記載の複数の連続体ロボット装置が配されており、前記複数の連続体ロボット装置がそれぞれ備える湾曲部によって、対象物を把持する把持動作を行う把持装置。
【請求項9】
前記把持動作を実行する際に、前記複数の連続体ロボット装置のうち、前記対象物の荷重がより加わる方が供えた前記固定手段によって前記他方のワイヤが固定される請求項8記載の把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、連続体ロボット装置または、連続体ロボットを用いた把持装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年産業用ロボットの分野において、食品や生体などの柔軟物やその他壊れやすいものを把持するための、ソフトグリッパと呼ばれる把持装置を備えたロボット装置が開発されている。このような把持装置は、エラストマーなどの柔軟な素材で形成された把持装置を空気圧で駆動するものや、連続体で形成されたマニピュレータをワイヤなどの線状部材の押し引きによって駆動するものが知られている。
【0003】
特許文献1の図14には、ワイヤ駆動の湾曲部を用いたマニピュレータの実施形態が開示されている。
【0004】
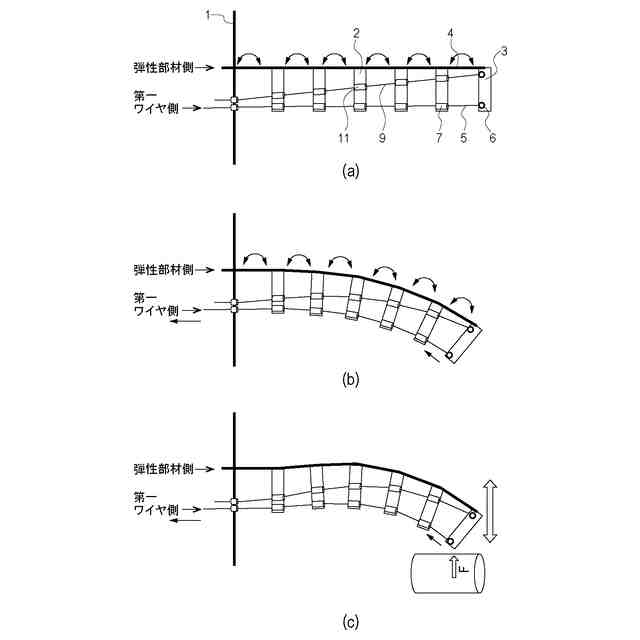
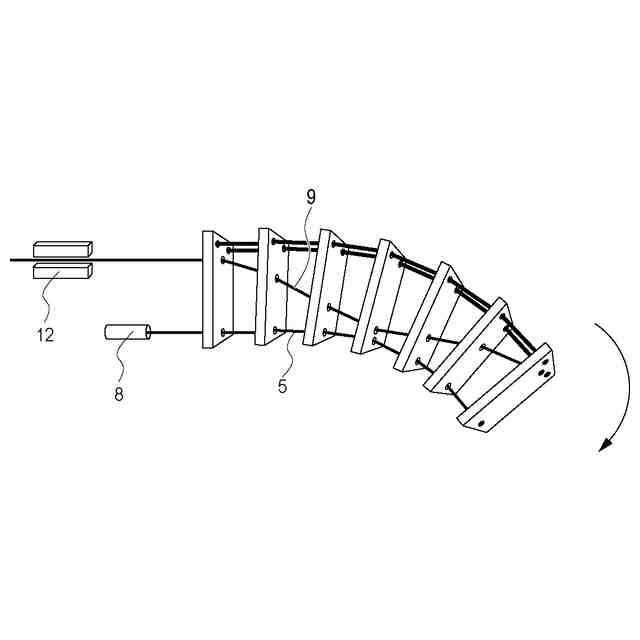
特許文献1に開示されているワイヤ駆動の湾曲部を備えたマニピュレータは、ワイヤの押し引きによって長手方向と直交する方向に湾曲部の湾曲状態が変化する。さらに、対象物との接触などによって湾曲部が外力を受けると、ワイヤの押し引き量に変化がなくとも、外力に応じてワイヤの長手方向と直交する方向に湾曲部が変形できるという特徴がある。これにより、対象物の形状に、湾曲部が倣うように変形することができる。また、対象物が柔軟物である場合、局所的な荷重をかけることなく、柔らかく把持することができる。
【0005】
しかしながら、湾曲部の長手方向と直交する方向の外力に強く対抗してマニピュレータの姿勢を維持することが困難であるため、把持力を一定以上に高めることが難しかった。例えば、重量物を把持して持ち上げる場合、荷重によって湾曲部がその重量物の形状に倣う以上に大きく変形してしまい、把持できないということがあった。
【0006】
これに対し、ワイヤの曲げ剛性を高めることで、外力に対する変形量を小さくし、把持力を高めることが考えられる。しかし、これにはより大きなワイヤ駆動力が必要となり、マニピュレータの制御性が悪化する。また、ワイヤ駆動マニピュレータの特徴である柔軟性を損なうこととなってしまう。
【先行技術文献】
【特許文献】
【0007】
特開2022-75783
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、上述の問題に鑑みてなされたものであり、ワイヤ駆動の制御性・柔軟性を損なうことなく、外力に対して姿勢維持性を向上した連続体ロボット装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
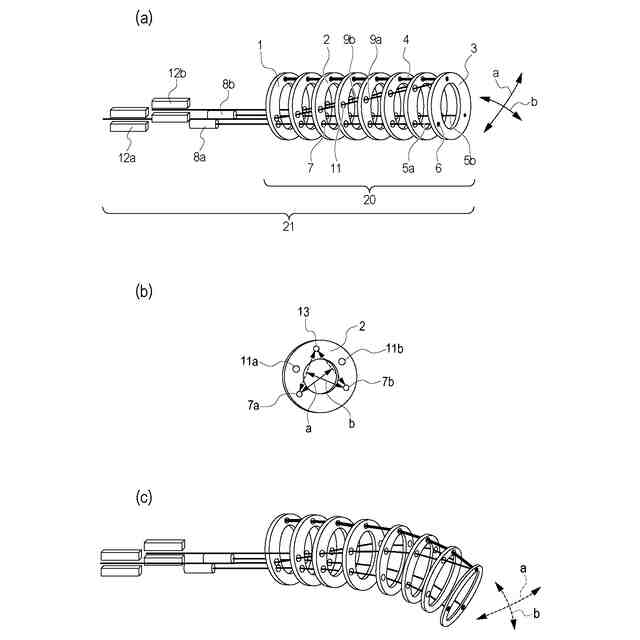
本発明は、基台と、
前記基台によって支持され、第一のワイヤおよび第二のワイヤがそれぞれ配設された第一の湾曲部と、
前記第一のワイヤおよび前記第二のワイヤの少なくとも一方を駆動する駆動部と、
を備える連続体ロボット装置であって、
前記第二のワイヤの一部は、前記第一のワイヤの長手方向に沿って交差する方向に延在し、かつ前記第二のワイヤの長手方向に対して直交する方向の移動が制限されるよう拘束されており、
前記第一のワイヤおよび前記第二のワイヤの少なくとも一方のワイヤは前記駆動部が駆動し、他方のワイヤは固定手段によって前記第一の湾曲部に対して固定されていることを特徴とする連続体ロボット装置を提供する。
【発明の効果】
【0010】
本発明によると、第一のワイヤおよび第二のワイヤの少なくとも一方を駆動した状態で、他方のワイヤを固定することで、制御性・柔軟性を保ったまま、姿勢維持性・把持剛性を付与することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
1日前
キヤノン株式会社
トナー
1日前
キヤノン株式会社
トナー
6日前
キヤノン株式会社
トナー
6日前
キヤノン株式会社
トナー
6日前
キヤノン株式会社
トナー
6日前
キヤノン株式会社
通信装置
20日前
キヤノン株式会社
定着装置
6日前
キヤノン株式会社
培養装置
6日前
キヤノン株式会社
光学装置
7日前
キヤノン株式会社
記録装置
7日前
キヤノン株式会社
情報機器
14日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
現像装置
9日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
培養装置
6日前
キヤノン株式会社
光学機器
20日前
キヤノン株式会社
光学機器
20日前
キヤノン株式会社
撮像装置
19日前
キヤノン株式会社
培養装置
6日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
光学機器
15日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
プログラム
1日前
キヤノン株式会社
プログラム
1日前
キヤノン株式会社
プログラム
1日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
無線通信装置
8日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像読取装置
6日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像表示装置
7日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ