TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025062420
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171483
出願日
2023-10-02
発明の名称
ロボット用ハンド、ピッキングロボット及びピッキング装置
出願人
興和株式会社
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20250407BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ピッキング対象物に倣って変形することで様々な物体をピッキング可能としつつ重量が重くなり過ぎないロボット用ハンドを提供すること。
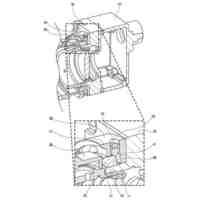
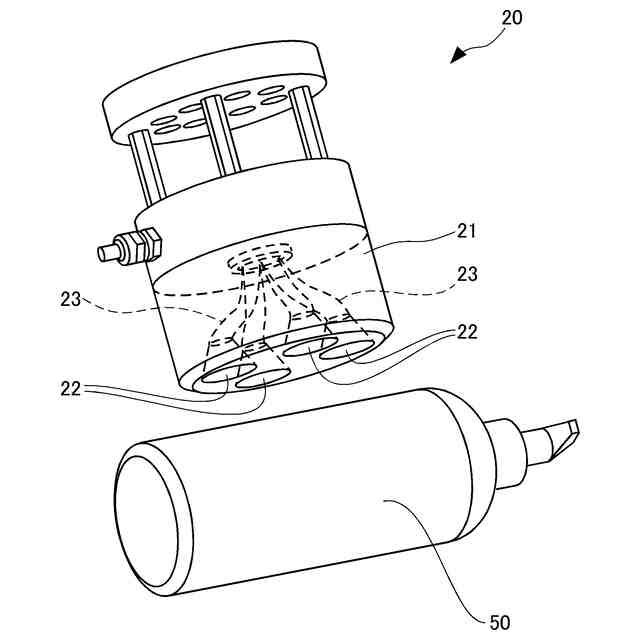
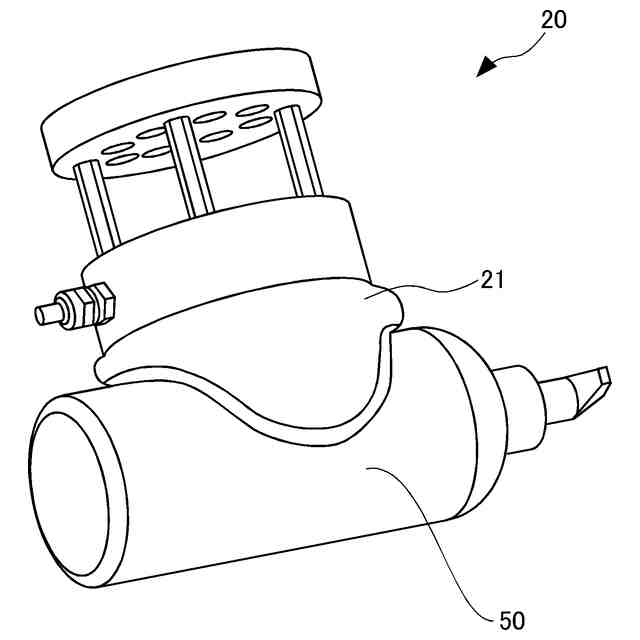
【解決手段】ロボット用ハンドは、内部に中空箇所を有しピッキング対象物に倣って変形可能な柔軟性を備えた袋体と、袋体のピッキング対象物に当接する箇所に設置される少なくとも1以上の吸着パッドと、吸着パッドに連続して接続され、吸着パッドから空気を吸い込むための吸気管と、袋体の中空箇所内に封入されるMR流体と、MR流体に対して磁場を印加させるための電磁石とを備えるようにした。
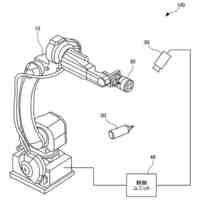
【選択図】図1
特許請求の範囲
【請求項1】
ピッキング対象物をピッキングするためのピッキングロボットに接続して使用するためのロボット用ハンドであって、
内部に中空箇所を有し前記ピッキング対象物に倣って変形可能な柔軟性を備えた袋体と、
前記袋体の前記ピッキング対象物に当接する箇所に設置される少なくとも1以上の吸着パッドと、
前記吸着パッドに連続して接続され、前記吸着パッドから空気を吸い込むための吸気管と、
前記袋体の前記中空箇所内に封入されるMR流体と、
前記MR流体に対して磁場を印加させるための電磁石と
を備えるロボット用ハンド。
続きを表示(約 770 文字)
【請求項2】
前記袋体は、概略円筒形状であり、円筒の底面にあたる面に前記吸着パッドを備え、当該吸着パッドを備えた円筒底面が前記ピッキング対象物に倣うように変形しうるものとした
請求項1記載のロボット用ハンド。
【請求項3】
請求項1又は請求項2に記載のロボット用ハンドを備えたピッキングロボット。
【請求項4】
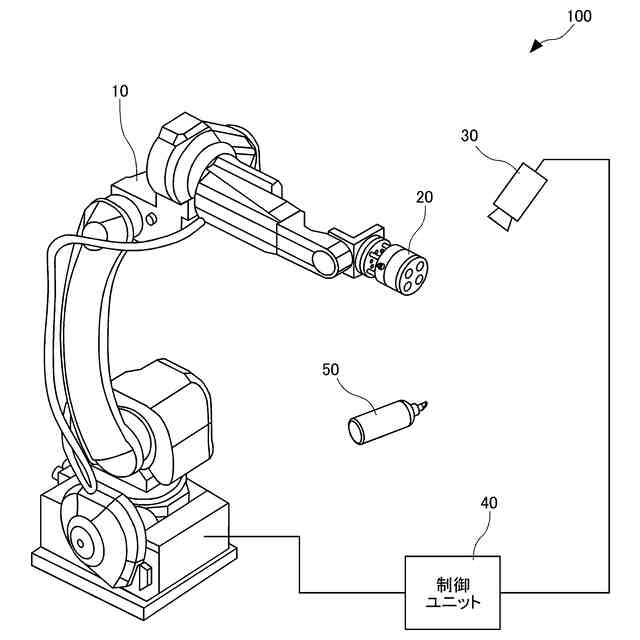
ピッキング対象物をピッキングするハンド部を備えたピッキングロボットと、前記ピッキング対象物の位置を特定する位置特定手段と、前記ピッキングロボットのピッキング動作を制御する制御ユニットとを備えたピッキング装置であって、
前記ハンド部は、
内部に中空箇所を有し前記ピッキング対象物に倣って変形可能な柔軟性を備えた袋体と、
前記袋体の前記ピッキング対象物に当接する箇所に設置される少なくとも1以上の吸着パッドと、
前記吸着パッドに連続して接続され、前記吸着パッドから空気を吸い込むための吸気管と、
前記袋体の前記中空箇所内に封入されるMR流体と、
前記MR流体に対して磁場を印加させるための電磁石と
を備え、
前記制御ユニットは、
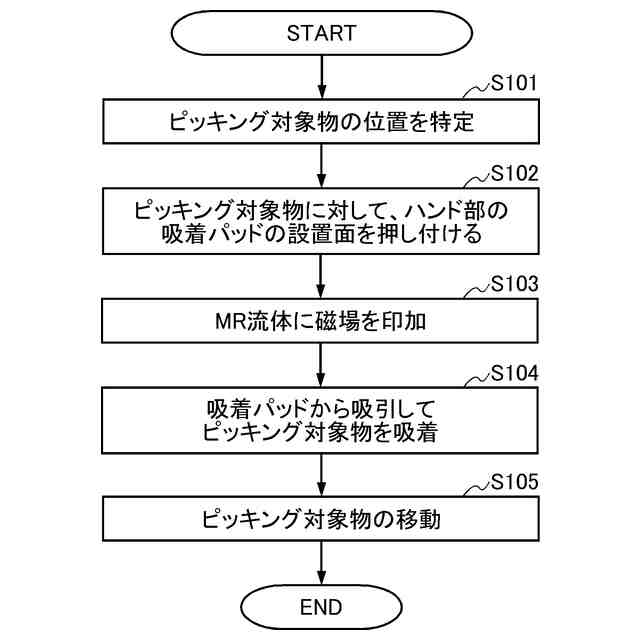
前記位置特定手段に基づいて前記ピッキング対象物の位置を特定する位置特定手順と、
特定した前記ピッキング対象物に対して前記ハンド部の前記吸着パッドの設置面を押し付ける押し付け手順と、
前記電磁石によって前記MR流体に磁場を印加させて硬化させる硬化手順と、
吸着パッドから空気を吸引して前記ピッキング対象物を吸着させる吸着手順と、
前記ピッキング対象物を目的の位置まで移動させる移動手順と
を実行する機能を備える
ことを特徴とするピッキング装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピッキング対象物に倣って変形することで様々な物体をピッキング可能としつつ重量が重くなり過ぎないロボット用ハンド、ピッキングロボット及びピッキング装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、ピッキングロボットのハンド部の一形態として、MR流体(Magneto Rheological Fluid:磁気粘性流体、磁性流体ともいう。)を利用したものが存在する。
【0003】
MR流体を用いたハンドとして、例えば、特許文献1が既に提案されている。この特許文献1には、MR流体が封入された袋体によって小さな物品を包み込んだ状態にて、MR流体に磁場を印加させてMR流体のせん断応力を向上させて小さな物品を把持する把持機構の仕組みが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2016-162981号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の把持機構によれば、袋帯よりも小さな物品はその袋帯に包み込まれ、通電によりMR流体のせん断応力が向上することにより把持が可能になるが、その袋帯よりも大きな物体においては包み込むことができないため、把持することができない。大きな形状のものを包み込めるように袋体を大型にすると、ハンド部分の重量が大きくなり、ロボットの可搬重量オーバーとなる可能性も高いため、ロボット側の負荷の面から袋体を大型とすることは問題があった。よって、ピッキング対象物に倣って変形することで様々な物体をピッキング可能としつつ重量が重くなり過ぎないハンド部の仕組みが求められていた。
【0006】
本発明は、上記問題点に鑑みなされたものであり、ピッキング対象物に倣って変形することで様々な物体をピッキング可能としつつ重量が重くなり過ぎないロボット用ハンド、ピッキングロボット及びピッキング装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係るロボット用ハンドは、ピッキング対象物をピッキングするためのピッキングロボットに接続して使用するためのロボット用ハンドであって、内部に中空箇所を有し前記ピッキング対象物に倣って変形可能な柔軟性を備えた袋体と、前記袋体の前記ピッキング対象物に当接する箇所に設置される少なくとも1以上の吸着パッドと、前記吸着パッドに連続して接続され、前記吸着パッドから空気を吸い込むための吸気管と、前記袋体の前記中空箇所内に封入されるMR流体と、前記MR流体に対して磁場を印加させるための電磁石とを備えることを特徴とする。
【0008】
また、本発明に係るロボット用ハンドにおいて、更に、前記袋体は、概略円筒形状であり、円筒の底面にあたる面に前記吸着パッドを備え、当該吸着パッドを備えた円筒底面が前記ピッキング対象物に倣うように変形しうるものとしたことを特徴とする。
【0009】
本発明に係るピッキングロボットは、上述の何れかのロボット用ハンドを備えていることを特徴とする。
【0010】
本発明に係るピッキング装置は、ピッキング対象物をピッキングするハンド部を備えたピッキングロボットと、前記ピッキング対象物の位置を特定する位置特定手段と、前記ピッキングロボットのピッキング動作を制御する制御ユニットとを備えたピッキング装置であって、前記ハンド部は、内部に中空箇所を有し前記ピッキング対象物に倣って変形可能な柔軟性を備えた袋体と、前記袋体の前記ピッキング対象物に当接する箇所に設置される少なくとも1以上の吸着パッドと、前記吸着パッドに連続して接続され、前記吸着パッドから空気を吸い込むための吸気管と、前記袋体の前記中空箇所内に封入されるMR流体と、前記MR流体に対して磁場を印加させるための電磁石とを備え、前記制御ユニットは、前記位置特定手段に基づいて前記ピッキング対象物の位置を特定する位置特定手順と、特定した前記ピッキング対象物に対して前記ハンド部の前記吸着パッドの設置面を押し付ける押し付け手順と、前記電磁石によって前記MR流体に磁場を印加させて硬化させる硬化手順と、吸着パッドから空気を吸引して前記ピッキング対象物を吸着させる吸着手順と、前記ピッキング対象物を目的の位置まで移動させる移動手順とを実行する機能を備えることを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
興和株式会社
医薬品
1か月前
興和株式会社
経口組成物
11日前
興和株式会社
医薬組成物
1か月前
興和株式会社
医薬組成物
2か月前
興和株式会社
医薬組成物
3か月前
興和株式会社
マウント構造
24日前
興和株式会社
キャリブレーション方法、及びキャリブレーションシステム
27日前
興和株式会社
医薬組成物
1か月前
興和株式会社
医薬組成物
2か月前
興和株式会社
医薬組成物
3か月前
興和株式会社
ロボット用ハンド、ピッキングロボット及びピッキング装置
4か月前
興和株式会社
ロボット用多指式ハンド、ピッキングロボット及びピッキング装置
2か月前
興和株式会社
ロキソプロフェンを含有する医薬製剤
2か月前
興和株式会社
ロキソプロフェンを含有してなる医薬製剤(肆)
2か月前
国立研究開発法人農業・食品産業技術総合研究機構
ミノムシ絹糸を含有するゲル及びその製造法
1か月前
クルーゼ,フリードリッヒ イー.
細胞外マトリックス調節剤
4か月前
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社スター精機
吸着パッド
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
カプラ接続治具
今日
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
積水ハウス株式会社
フィルム除去具
12日前
株式会社マキタ
電気機器
1か月前
株式会社スター精機
産業用ロボット
2か月前
ホシデン株式会社
分解用治具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ