TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090028
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2024210537
出願日
2024-12-03
発明の名称
蓋閉め装置および蓋閉め方法
出願人
キユーピー株式会社
,
株式会社安川電機
代理人
個人
主分類
B65B
7/28 20060101AFI20250609BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】 嵌合不良の発生を抑制できる蓋閉め装置および蓋閉め方法を提供する。
【解決手段】 嵌合容器2の蓋閉め装置1であって、ロボット3と、ロボット3の先端部に装着されるハンド4と、容器本体21が置かれる蓋閉め台5と、蓋閉め動作を制御する制御装置6と、を備え、ハンド4は、ロボット3の動作により姿勢が変化するハンド本体41と、ハンド本体4に設けられ、蓋22を保持可能な蓋保持部42と、ハンド本体41に対して変位動作可能に設けられ、当該変位動作及びロボット3の動作に基づいて、蓋側嵌合部224を上方から押圧し、容器本体側嵌合部214に嵌合させる押圧部44と、を備え、押圧部44は、予め決定された蓋側嵌合部224の複数箇所を押圧し、制御装置6は、蓋側嵌合部224の複数箇所を、平面視時計回り又は反時計回りで順番に押圧するようにロボット3及び押圧部44を制御する。
【選択図】 図13
特許請求の範囲
【請求項1】
容器本体と、前記容器本体の上部開口を上方から閉じ、かつ前記容器本体との嵌合により閉じ状態を維持する蓋と、からなる嵌合容器の蓋閉め装置であって、
ロボットと、
前記ロボットの先端部に装着されるハンドと、
前記容器本体が置かれる蓋閉め台と、
蓋閉め動作を制御する制御装置と、を備え、
前記ハンドは、
前記ロボットの動作により姿勢が変化するハンド本体と、
前記ハンド本体に設けられ、前記蓋を保持可能な蓋保持部と、
前記ハンド本体に対して変位動作可能に設けられ、前記変位動作及び前記ロボットの動作に基づいて、前記蓋側の嵌合部である蓋側嵌合部を上方から押圧し、前記容器本体側の嵌合部である容器本体側嵌合部に嵌合させる押圧部と、を備え、
前記押圧部は、予め決定された前記蓋側嵌合部の複数箇所を押圧し、
前記制御装置は、前記蓋側嵌合部の前記複数箇所を、平面視時計回り又は反時計回りで順番に押圧するように前記ロボット及び前記押圧部を制御する、蓋閉め装置。
続きを表示(約 960 文字)
【請求項2】
前記蓋側嵌合部は、平面視多角形状を有し、
前記押圧部は、前記蓋側嵌合部の複数の角部を、平面視時計回り又は反時計回りで順番に押圧する、請求項1に記載の蓋閉め装置。
【請求項3】
前記蓋側嵌合部は、平面視四角形を有し、
前記押圧部は、
前記四角形の第1辺及びその両端に位置する角部を押圧可能な第1押圧具と、
前記四角形の前記第1辺と平行な第3辺及びその両端に位置する角部を押圧可能な第2押圧具と、
前記第1押圧具を上下動させる第1押圧用アクチュエータと、
前記第2押圧具を上下動させる第2押圧用アクチュエータと、を備え、
前記制御装置は、前記ロボットによる前記ハンド本体の上下動作及び傾斜動作と、前記第1押圧用アクチュエータによる前記第1押圧具の上下動作と、前記第2押圧用アクチュエータによる前記第2押圧具の上下動作と、を制御することで、前記蓋側嵌合部の4つの角部を、平面視時計回り又は反時計回りで順番に押圧させる、請求項1に記載の蓋閉め装置。
【請求項4】
前記ハンドは、前記第1押圧具と前記第2押圧具との間隔を調整する間隔調整部をさらに備える、請求項3に記載の蓋閉め装置。
【請求項5】
前記ハンドは、前記蓋保持部で保持された前記蓋の中央部を下方に押圧し、前記蓋の中央部を凹状に弾性変形させる凹み形成部をさらに備える、請求項1に記載の蓋閉め装置。
【請求項6】
前記ハンドは、前記押圧部の押圧力を検出する押圧力検出部をさらに備え、
前記制御装置は、前記押圧力検出部が検出した前記押圧部の押圧力に基づいて、前記蓋側嵌合部が前記容器本体側嵌合部に嵌合したか否かを前記複数箇所ごとに判定する、請求項1に記載の蓋閉め装置。
【請求項7】
容器本体との嵌合により閉じ状態を維持する蓋とからなる嵌合容器の蓋閉め方法であって、
蓋閉め装置の押圧部は、蓋側嵌合部を上方から押圧し、容器本体側嵌合部に嵌合させる押圧工程を備え、
前記押圧工程が、予め決定された前記蓋側嵌合部の複数箇所を、平面視時計回り又は反時計回りで順番に押圧することを特徴とする蓋閉め方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、嵌合容器の蓋閉め装置および蓋閉め方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
容器本体と、容器本体の上部開口を上方から閉じ、かつ容器本体との嵌合により閉じ状態を維持する蓋と、からなる嵌合容器の蓋閉め装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開平6-219403号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の蓋閉め装置では、容器本体側嵌合部に対し、蓋側嵌合部の全域を同時に嵌合させるため、嵌合不良が発生しやすい。
【0005】
そこで、本開示は、嵌合不良の発生を抑制できる蓋閉め装置および蓋閉め方法の提供を目的とする。
【課題を解決するための手段】
【0006】
1つの側面では、以下のような解決手段を提供する。
容器本体と、前記容器本体の上部開口を上方から閉じ、かつ前記容器本体との嵌合により閉じ状態を維持する蓋と、からなる嵌合容器の蓋閉め装置であって、
ロボットと、
前記ロボットの先端部に装着されるハンドと、
前記容器本体が置かれる蓋閉め台と、
蓋閉め動作を制御する制御装置と、を備え、
前記ハンドは、
前記ロボットの動作により姿勢が変化するハンド本体と、
前記ハンド本体に設けられ、前記蓋を保持可能な蓋保持部と、
前記ハンド本体に対して変位動作可能に設けられ、前記変位動作及び前記ロボットの動作に基づいて、前記蓋の側部の嵌合部である蓋側嵌合部を上方から押圧し、前記容器本体の側部の嵌合部である容器本体側嵌合部に嵌合させる押圧部と、を備え
前記押圧部は、予め決定された前記蓋側嵌合部の複数箇所を押圧し、
前記制御装置は、前記蓋側嵌合部の前記複数箇所を、平面視時計回り又は反時計回りで順番に押圧するように前記ロボット及び前記押圧部を制御する。
【発明の効果】
【0007】
本開示によれば、嵌合不良の発生を抑制できる蓋閉め装置および蓋閉め方法の提供が可能となる。
【図面の簡単な説明】
【0008】
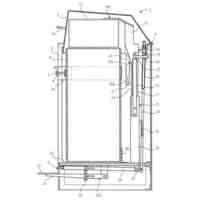
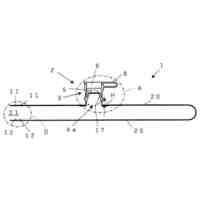
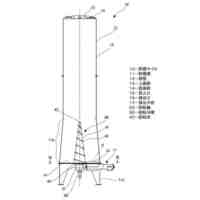
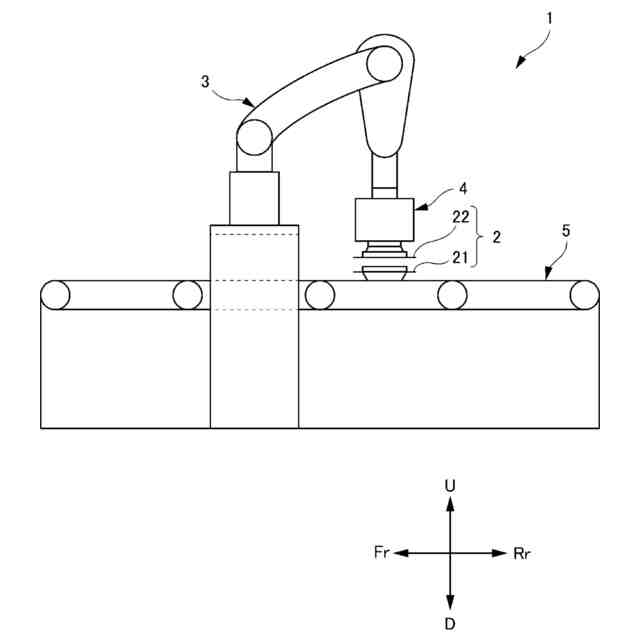
本発明の実施例に係る蓋閉め装置の概略構成を示す全体図である。
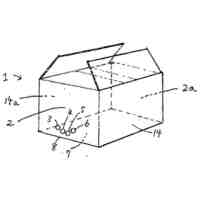
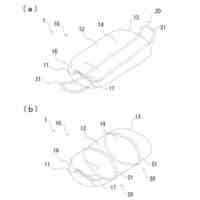
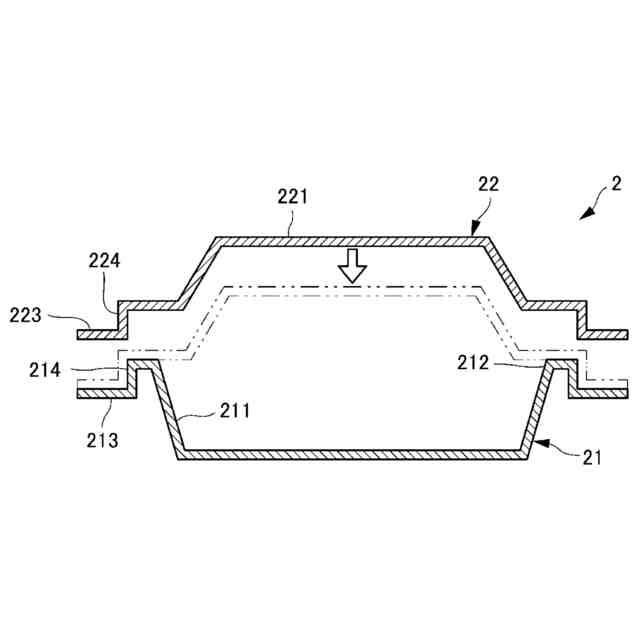
嵌合容器の断面図である。
ハンドが装着されたロボットの正面図である。
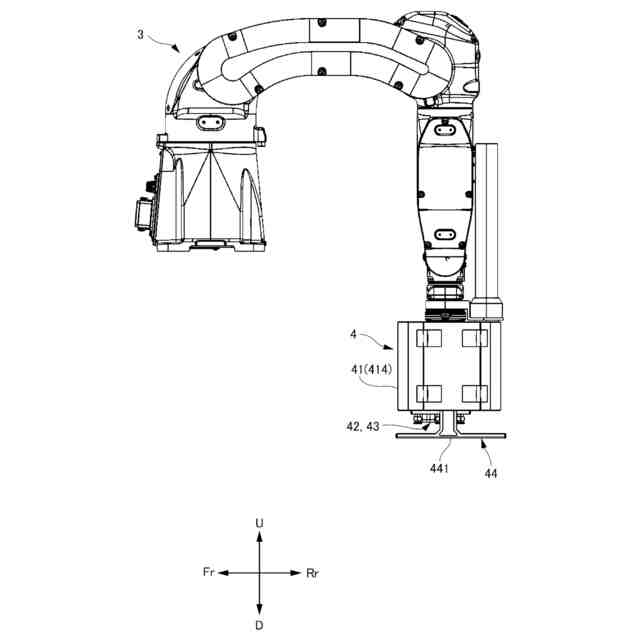
ハンドが装着されたロボットの側面図である。
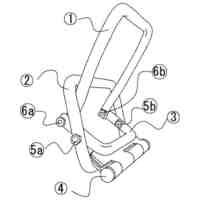
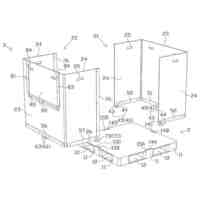
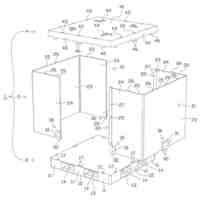
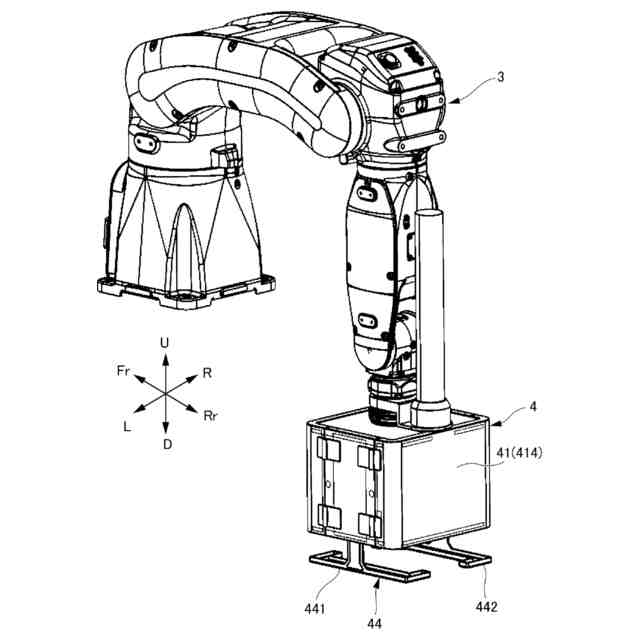
ハンドが装着されたロボットを斜め上方から見た斜視図である。
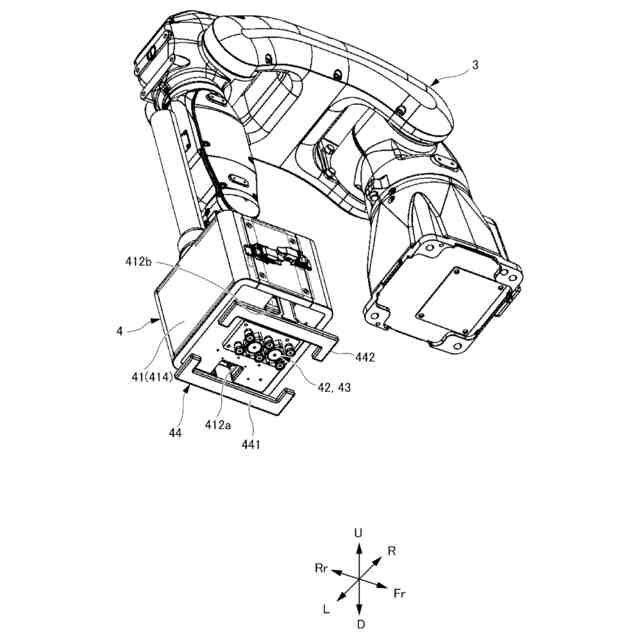
ハンドが装着されたロボットを斜め下方から見た斜視図である。
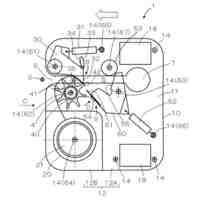
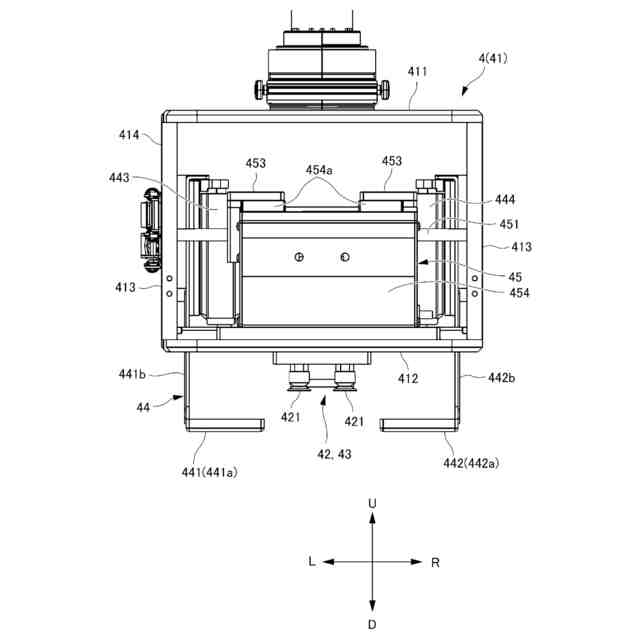
ハンドの構成を示す正面図である。
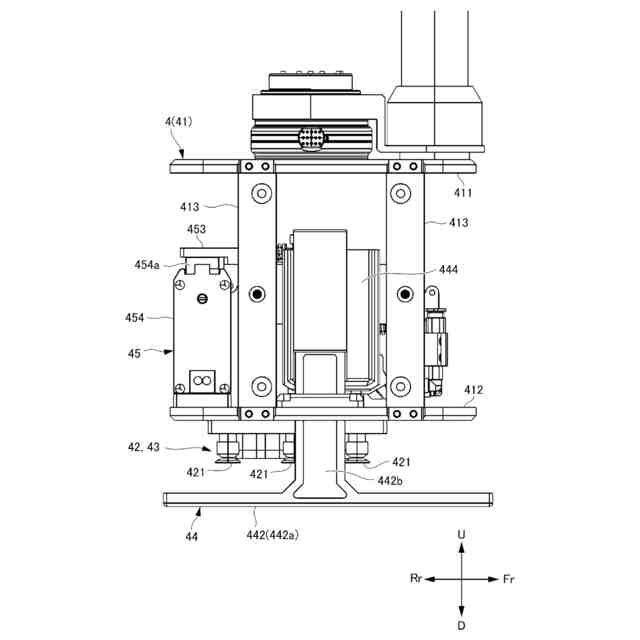
ハンドの構成を示す側面図である。
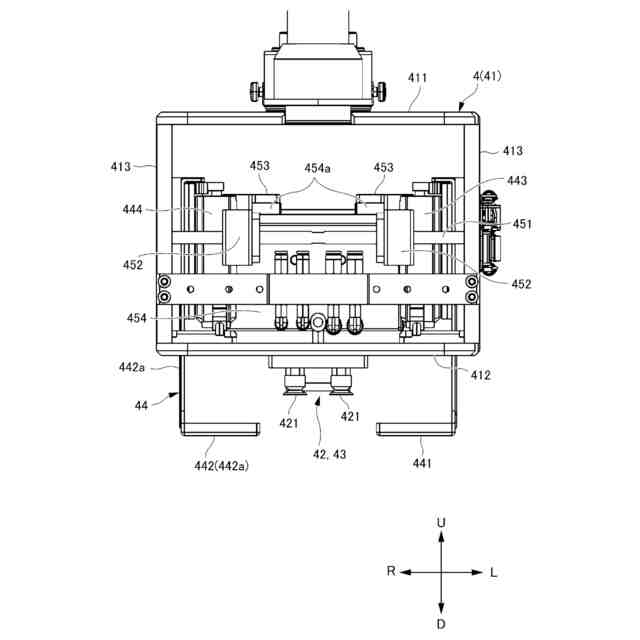
ハンドの構成を示す背面図である。
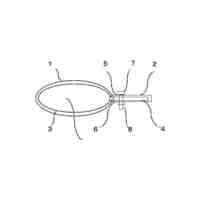
ハンドの構成を示す下面図である。
ハンドの構成を示す斜視図である。
制御構成を示すブロック図である。
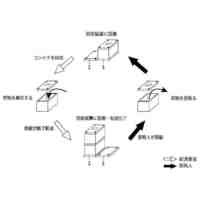
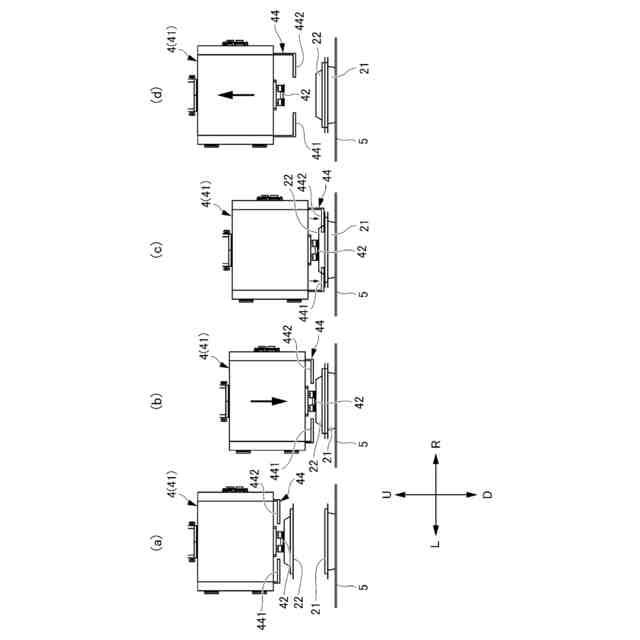
蓋閉め装置による蓋閉め動作の概略を示す図であり、(a)はハンドの上方待機状態を示す図、(b)はハンドの下降状態を示す図、(c)押圧部の押圧状態を示す図、(d)は蓋閉め後のハンドの上昇状態を示す図である。
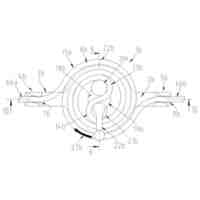
押圧具による嵌合容器の押圧順序を示す図である。
蓋閉め制御の処理手順を示すフローチャートである。
凹み形成制御の処理手順を示すフローチャートである。
嵌合判定制御の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら実施例について詳細に説明する。
【0010】
図1に示す蓋閉め装置1は、嵌合容器2の蓋閉めを自動的に行う装置である。図2に示すように、嵌合容器2は、容器本体21及び蓋22を備える樹脂製容器であり、例えば、惣菜、弁当、菓子、食材などの食品や、食品以外の物品を被収容物として収容できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キユーピー株式会社
酸性水中油型乳化調味料
25日前
個人
箱
10か月前
個人
収容箱
1か月前
個人
ゴミ箱
10か月前
個人
包装体
11か月前
個人
コンベア
3か月前
個人
容器
7か月前
個人
段ボール箱
5か月前
個人
段ボール箱
5か月前
個人
ゴミ収集器
5か月前
個人
角筒状構造体
3か月前
個人
バンド
8日前
個人
楽ちんハンド
3か月前
個人
パウチ補助具
10か月前
個人
土嚢運搬器具
6か月前
個人
折り畳み水槽
11か月前
個人
宅配システム
5か月前
個人
廃棄物収容容器
25日前
個人
お薬の締結装置
4か月前
個人
閉塞装置
8か月前
個人
ダンボール宝箱
11か月前
個人
コード類収納具
6か月前
個人
圧縮収納袋
11か月前
株式会社和気
包装用箱
7か月前
個人
蓋閉止構造
2か月前
株式会社コロナ
梱包材
3か月前
個人
蓋閉止構造
2か月前
個人
貯蔵サイロ
5か月前
個人
ゴミ処理機
7か月前
個人
把手付米袋
2か月前
個人
積み重ね用補助具
28日前
個人
塗料容器用蓋
11か月前
個人
輸送積荷用動吸振器
4か月前
積水樹脂株式会社
接着剤
10か月前
株式会社新弘
容器
1か月前
株式会社新弘
容器
10か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ