TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110188
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024003981
出願日
2024-01-15
発明の名称
駆動装置
出願人
トヨタ自動車株式会社
代理人
個人
主分類
H02P
5/46 20060101AFI20250718BHJP(電力の発電,変換,配電)
要約
【課題】駆動対象物の正確な位置の初期化を行うことが可能な駆動装置を提供すること。
【解決手段】本開示に係る駆動装置において、第1入力段エンコーダは、起動時に、設定部によって設定された駆動対象物の基準位置に基づいて、第1入力段ギアの回転数を初期化し、且つ、第1出力段エンコーダによって計測された第1出力段ギアの回転角度に基づいて、第1入力段ギアの回転角度を初期化し、第2入力段エンコーダは、起動時に、設定部によって設定された駆動対象物の基準位置に基づいて、第2入力段ギアの回転数を初期化し、且つ、第2出力段エンコーダによって計測された第2出力段ギアの回転角度に基づいて、第2入力段ギアの回転角度を初期化する。
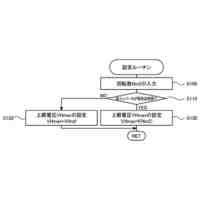
【選択図】図4
特許請求の範囲
【請求項1】
第1入力段ギアと、
前記第1入力段ギアに対向配置された第2入力段ギアと、
前記第1入力段ギアを回転させる第1アクチュエータと、
前記第2入力段ギアを回転させる第2アクチュエータと、
前記第1入力段ギアの回転角度及び回転数を計測するインクリメンタルエンコーダである第1入力段エンコーダと、
前記第2入力段ギアの回転角度及び回転数を計測するインクリメンタルエンコーダである第2入力段エンコーダと、
前記第1入力段ギアに直接的又は間接的に噛み合わされた第1出力段ギアと、
前記第2入力段ギアに直接的又は間接的に噛み合わされた第2出力段ギアと、
前記第1出力段ギアの回転角度を計測するアブソルートエンコーダである第1出力段エンコーダと、
前記第2出力段ギアの回転角度を計測するアブソルートエンコーダである第2出力段エンコーダと、
前記第1出力段ギアの回転と前記第2出力段ギアの回転とによってスライド及び回転可能に構成された駆動対象物、及び、当該駆動対象物が取り付けられた筐体、の一方に設置された検知対象物と、
前記駆動対象物及び前記筐体の他方に設置され、前記検知対象物を検知可能なセンサと、
前記センサによる前記検知対象物の検知状況に応じて、前記駆動対象物の前記筐体における基準位置を設定する設定部と、
を備えた駆動装置であって、
前記第1入力段エンコーダは、起動時に、前記設定部によって設定された前記駆動対象物の基準位置に基づいて、前記第1入力段ギアの回転数を初期化し、且つ、前記第1出力段エンコーダによって計測された前記第1出力段ギアの回転角度に基づいて、前記第1入力段ギアの回転角度を初期化し、
前記第2入力段エンコーダは、起動時に、前記設定部によって設定された前記駆動対象物の基準位置に基づいて、前記第2入力段ギアの回転数を初期化し、且つ、前記第2出力段エンコーダによって計測された前記第2出力段ギアの回転角度に基づいて、前記第2入力段ギアの回転角度を初期化する、
駆動装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、駆動装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
一般的に、モータ等によって駆動される駆動対象物による高精度な動作を実現するために、駆動対象物の位置を精度良く特定することが求められている。例えば、特許文献1には、一方向に沿って所定範囲内を移動可能な絞り体が基準位置に配置されていることを電気的又は光学的手段により検出する装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2006-242917号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、作業ロボット等の機械では、一組のモータを用いて一組の入力段ギアを回転させて、当該一組の入力段ギアに噛み合わされた一組の出力段ギアを回転させることにより、駆動対象物を基準軸に沿ってスライドさせる機構が設けられている場合がある。このような機構では、起動時に、それぞれのギアの回転数や回転角を計測するインクリメンタルエンコーダにより計測された何れかのギアの回転数が不定になるため、駆動対象物の正確な位置の特定、即ち、駆動対象物の正確な位置の初期化、が困難になるという課題があった。
【0005】
本開示は、以上の背景に鑑みなされたものであり、駆動対象物の正確な位置の初期化を行うことが可能な駆動装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る駆動装置は、第1入力段ギアと、前記第1入力段ギアに対向配置された第2入力段ギアと、前記第1入力段ギアを回転させる第1アクチュエータと、前記第2入力段ギアを回転させる第2アクチュエータと、前記第1入力段ギアの回転角度及び回転数を計測するインクリメンタルエンコーダである第1入力段エンコーダと、前記第2入力段ギアの回転角度及び回転数を計測するインクリメンタルエンコーダである第2入力段エンコーダと、前記第1入力段ギアに直接的又は間接的に噛み合わされた第1出力段ギアと、前記第2入力段ギアに直接的又は間接的に噛み合わされた第2出力段ギアと、前記第1出力段ギアの回転角度を計測するアブソルートエンコーダである第1出力段エンコーダと、前記第2出力段ギアの回転角度を計測するアブソルートエンコーダである第2出力段エンコーダと、前記第1出力段ギアの回転と前記第2出力段ギアの回転とによってスライド及び回転可能に構成された駆動対象物、及び、当該駆動対象物が取り付けられた筐体、の一方に設置された検知対象物と、前記駆動対象物及び前記筐体の他方に設置され、前記検知対象物を検知可能なセンサと、前記センサによる前記検知対象物の検知状況に応じて、前記駆動対象物の前記筐体における基準位置を設定する設定部と、を備えた駆動装置であって、前記第1入力段エンコーダは、起動時に、前記設定部によって設定された前記駆動対象物の基準位置に基づいて、前記第1入力段ギアの回転数を初期化し、且つ、前記第1出力段エンコーダによって計測された前記第1出力段ギアの回転角度に基づいて、前記第1入力段ギアの回転角度を初期化し、前記第2入力段エンコーダは、起動時に、前記設定部によって設定された前記駆動対象物の基準位置に基づいて、前記第2入力段ギアの回転数を初期化し、且つ、前記第2出力段エンコーダによって計測された前記第2出力段ギアの回転角度に基づいて、前記第2入力段ギアの回転角度を初期化する。この駆動装置は、起動時において、インクリメンタルエンコーダによって計測されたギアの回転数が不定になった場合でも、駆動対象物の正確な位置の初期化を行うことができる。
【発明の効果】
【0007】
本開示によれば、駆動対象物の正確な位置の初期化を行うことが可能な駆動装置を提供することができる。
【図面の簡単な説明】
【0008】
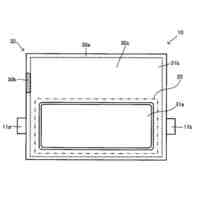
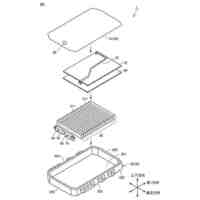
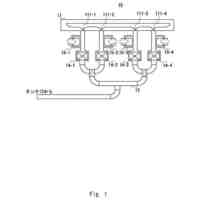
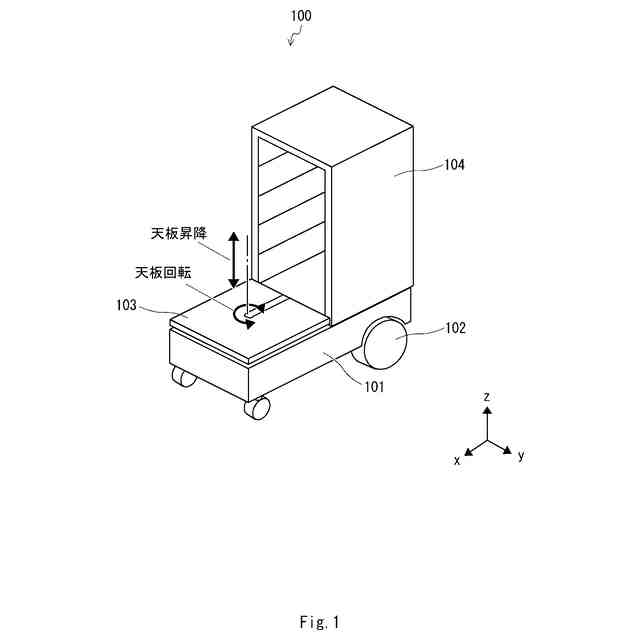
実施の形態1に係る搬送ロボットの外観を示す概略斜視図である。
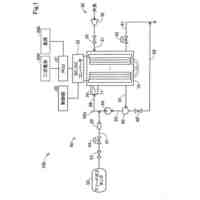
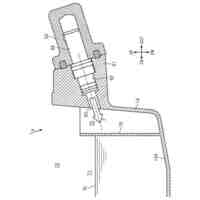
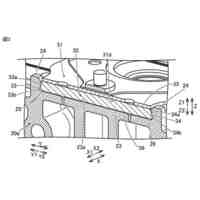
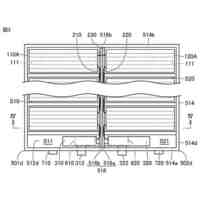
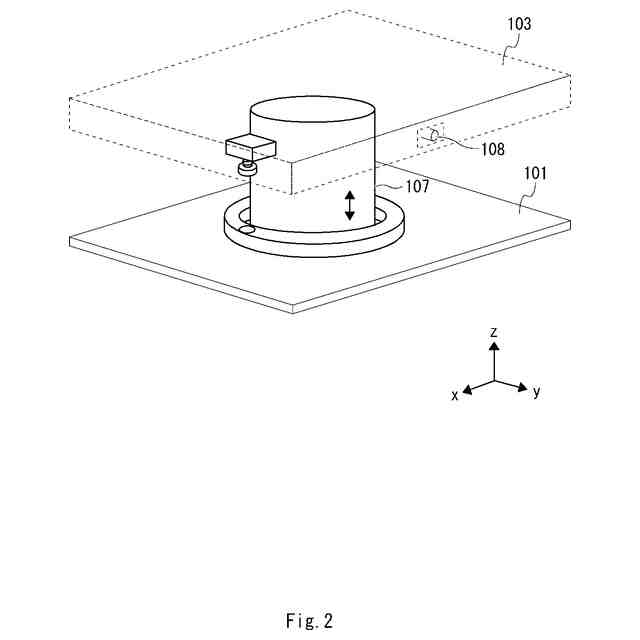
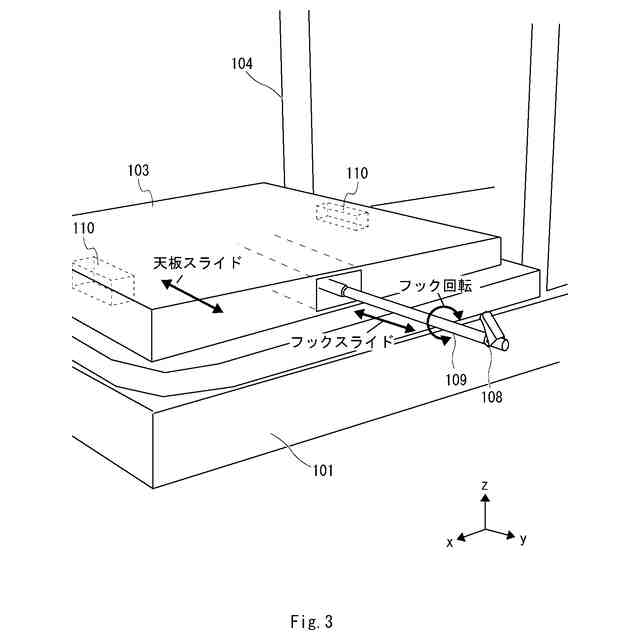
実施の形態1に係る搬送ロボットの一部を示す概略斜視図である。
実施の形態1に係る搬送ロボットの一部を示す概略斜視図である。
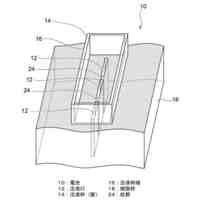
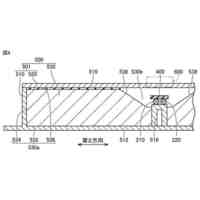
実施の形態1に係る搬送ロボットの一部を示す概略平面図である。
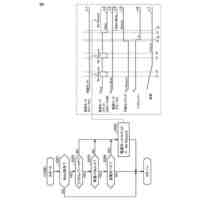
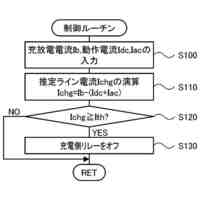
実施の形態1に係る搬送ロボットに設けられたキャリブレーション装置の動作を説明するための概略平面図である。
【発明を実施するための形態】
【0009】
以下、発明の実施の形態を通じて本発明を説明するが、特許請求の範囲に係る発明を以下の実施形態に限定するものではない。また、実施形態で説明する構成の全てが課題を解決するための手段として必須であるとは限らない。説明の明確化のため、以下の記載及び図面は、適宜、省略、及び簡略化がなされている。各図面において、同一の要素には同一の符号が付されており、必要に応じて重複説明は省略されている。
【0010】
<実施の形態1>
図1は、実施の形態1に係る搬送ロボットの外観を示す概略斜視図である。図2及び図3は、実施の形態1に係る搬送ロボットの一部を示す概略斜視図である。本実施の形態に係る搬送ロボットは、出発地点に設置された棚等に配置されたトレイを、天板に載せて目的地まで搬送し、目的地に設置された棚等に移すまで、を自動的に行うことが可能な自律移動型ロボットである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電池
26日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
配管
21日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
ロータ
21日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
タンク
5日前
トヨタ自動車株式会社
電動車
21日前
トヨタ自動車株式会社
学習装置
20日前
トヨタ自動車株式会社
制御装置
12日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
エンジン
12日前
トヨタ自動車株式会社
制御装置
21日前
トヨタ自動車株式会社
塗工装置
12日前
トヨタ自動車株式会社
制御装置
21日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
処理装置
12日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
制御装置
21日前
トヨタ自動車株式会社
制御装置
20日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
コネクタ
20日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
判定装置
20日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
制御装置
20日前
トヨタ自動車株式会社
蓄電セル
28日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ