TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121777
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024017475
出願日
2024-02-07
発明の名称
電流検出装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
H02P
21/22 20160101AFI20250813BHJP(電力の発電,変換,配電)
要約
【課題】ベクトル制御を行う後段のモータ制御装置における演算負荷を軽減できる三相モータの電流検出装置を提供すること。
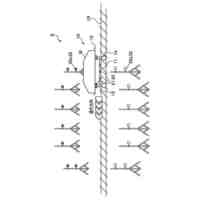
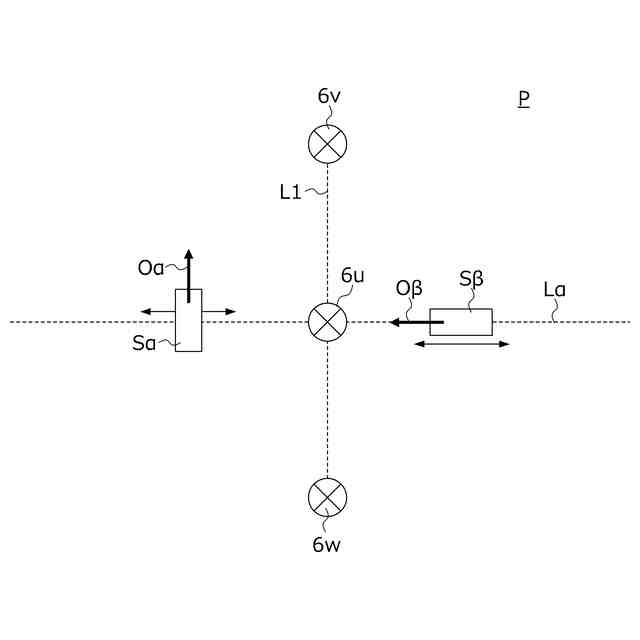
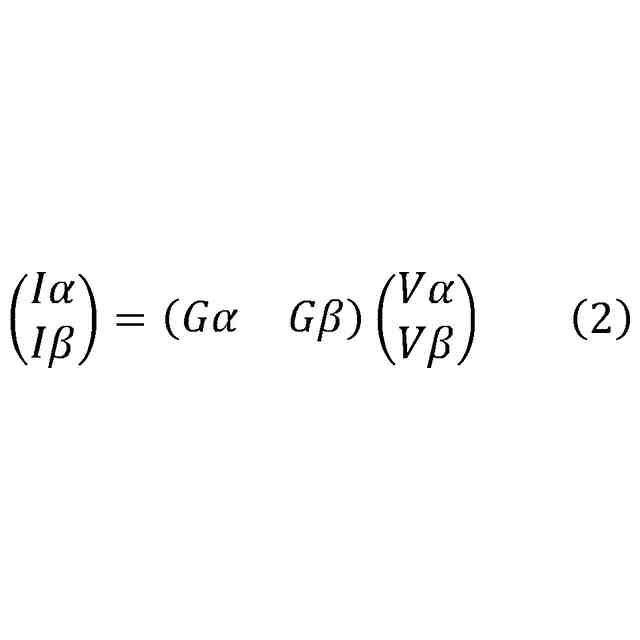
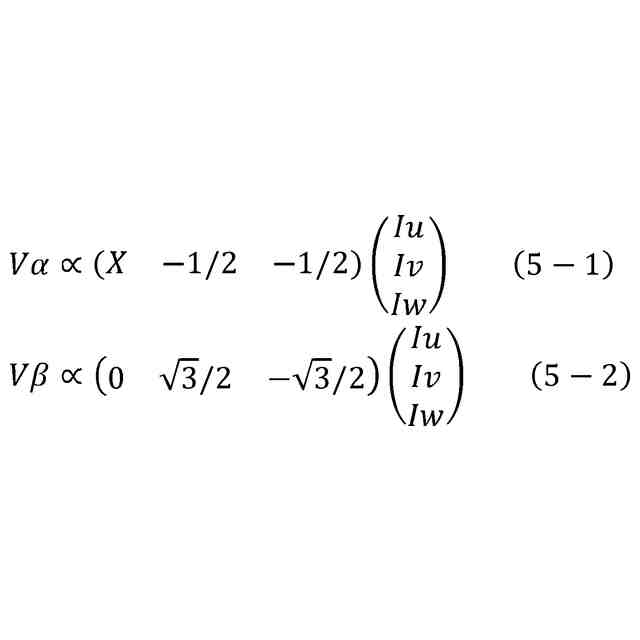
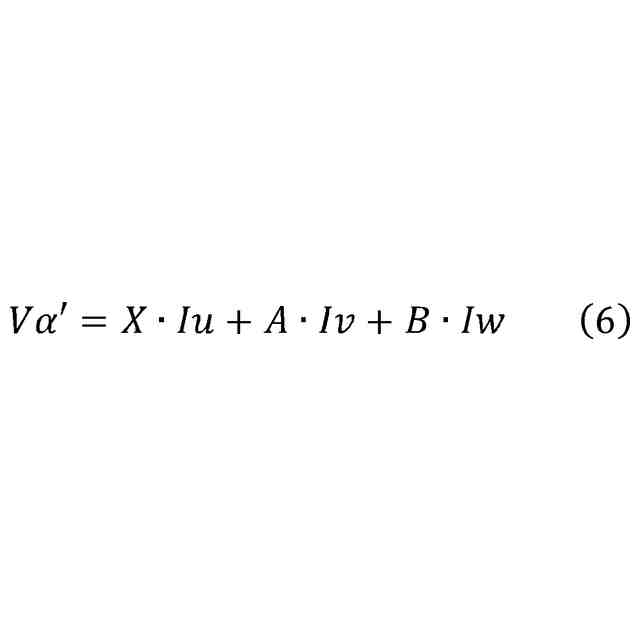
【解決手段】電流検出装置は、3本の相電流線6u,6v,6wの周囲に設けられた2つの磁気検出素子Sα,Sβと、これら磁気検出素子Sα,Sβそれぞれの出力値(Vα,Vβ)にα相及びβ相ゲイン(Gα,Gβ)を乗算したものをα相及びβ相電流値(Iα,Iβ)として出力する電流補正演算部22と、を備える。3本の相電流線6u,6v,6wに対する2つの磁気検出素子Sα,Sβの相対位置並びに検出軸の向きは、“-1/2”以外の係数Xを用いて定められるα相レイアウト条件式及びβ相レイアウト条件式が成立するように定められ、α相及びβ相ゲイン(Gα,Gβ)の値は、α相及びβ相電流値(Iα,Iβ)の振幅が等しくなるように設定される。
【選択図】図4
特許請求の範囲
【請求項1】
三相モータの第1電流線、第2相電流線及び第3相電流線を流れる電流を検出する電流検出装置であって、
前記第1相、第2相及び第3相電流線の周囲に設けられたα相磁気検出素子及びβ相磁気検出素子と、
前記α相及びβ相磁気検出素子それぞれの出力値にα相ゲイン及びβ相ゲインを乗算したものをα相電流値及びβ相電流値として出力する演算手段と、を備え、
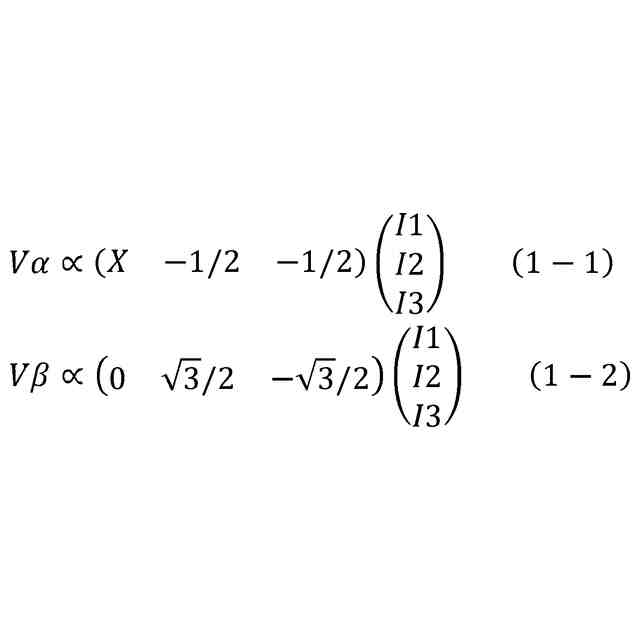
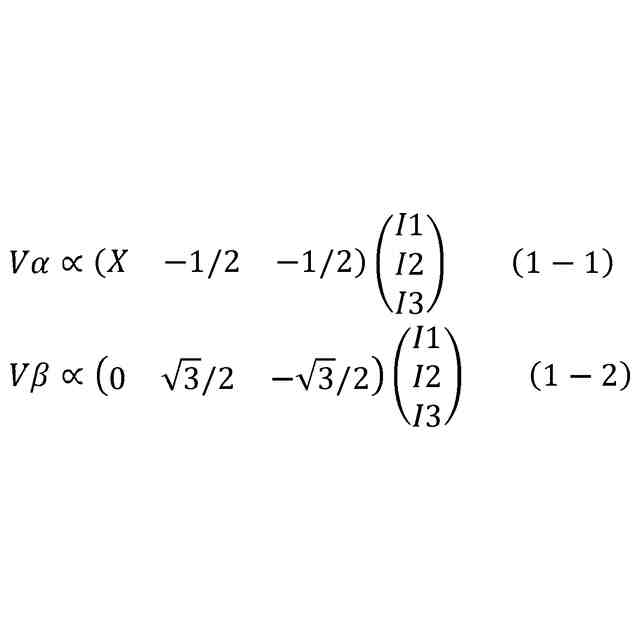
前記第1相電流線を流れる電流値をI1とし、前記第2相電流線を流れる電流値をI2とし、前記第3相電流線を流れる電流値をI3とし、前記α相磁気検出素子の出力値をVαとし、前記β相磁気検出素子の出力値をVβとした場合、前記第1相、第2相及び第3相電流線に対する前記α相及びβ相磁気検出素子の相対位置並びに検出軸の向きは、“-1/2”以外の係数Xを用いて定められる下記式(1-1)及び(1-2)が成立するように定められ、
前記α相及びβ相ゲインの値は、前記α相及びβ相電流値の振幅が等しくなるように設定されることを特徴とする電流検出装置。
TIFF
2025121777000010.tif
34
134
続きを表示(約 490 文字)
【請求項2】
前記α相及びβ相磁気検出素子は、前記第1、第2及び第3相電流線に対し直交する同一の配置面内に設けられることを特徴とする請求項1に記載の電流検出装置。
【請求項3】
前記α相磁気検出素子は、前記配置面内において前記第2相電流線と前記第3相電流線とを結ぶ線分と直交しかつ当該線分を二等分する仮想的な配置線上に配置されることを特徴とする請求項2に記載の電流検出装置。
【請求項4】
前記第1相電流線は、前記配置面に対し前記線分と前記配置線との交点において直交し、
電源から前記三相モータへ向けて前記第1、第2及び第3相電流線を流れる直流電流の向きは前記配置面では同じであることを特徴とする請求項3に記載の電流検出装置。
【請求項5】
前記β相磁気検出素子は、前記配置面内において前記配置線上に配置されることを特徴とする請求項4に記載の電流検出装置。
【請求項6】
前記β相磁気検出素子は、その検出軸が前記配置線と平行になるように前記配置線上に配置されることを特徴とする請求項5に記載の電流検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電流検出装置に関する。より詳しくは、三相モータの各相の電流を2つの磁気検出素子に基づいて検出する電流検出装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、低炭素社会又は脱炭素社会の実現に向けた取り組みが活発化し、車両においてもCO
2
排出量の削減やエネルギ効率の改善のために、電動車両に関する研究開発が行われている。
【0003】
電動車両や家電機器(例えば、エアコンや洗濯機等)等に搭載される三相交流モータの制御方式として、所謂ベクトル制御が広く採用されている。ベクトル制御では、モータ制御装置は、モータの回転直交座標系であるd-q座標上で定義されるd軸電流及びq軸電流のフィードバック制御に基づいてインバータに対する指令信号を生成する。
【先行技術文献】
【特許文献】
【0004】
国際公開第2013/058282号
中国特許出願CN202211040361.X
【発明の概要】
【発明が解決しようとする課題】
【0005】
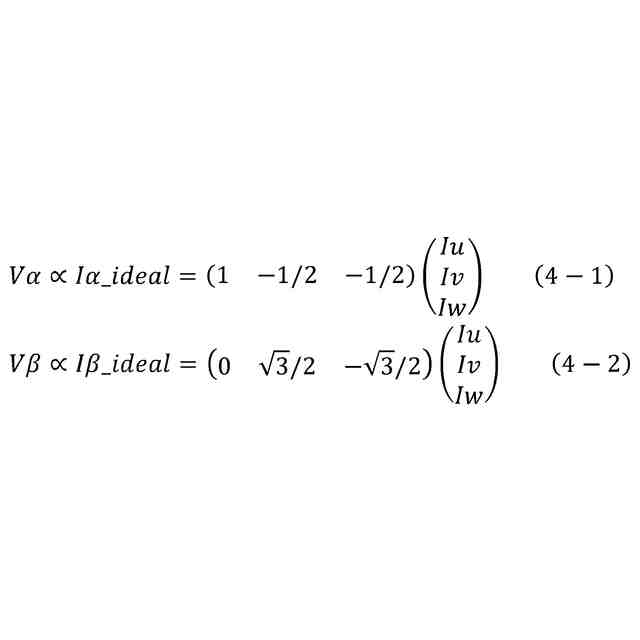
このようにモータ制御装置では、d-q座標上で電流のフィードバック制御を行うため、例えば特許文献1に示すような電流検出装置を用いて検出されたモータのU相電流、V相電流及びW相電流を、d軸電流及びq軸電流に変換する必要がある。より具体的には、モータ制御装置では、初めに電流検出装置によって検出された三相電流(Iu,Iv,Iw)をクラーク変換によって固定座標系で定義される二相電流(Iα,Iβ)に変換した後、この二相電流(Iα,Iβ)をモータの回転角度θを用いたパーク変換によってd-q座標系で定義される二相電流(Id,Iq)に変換する。このように従来の電流検出装置の出力を用いたベクトル制御では、三相電流(Iu,Iv,Iw)を二相電流(Id,Iq)に変換する演算をモータ制御装置において実行する必要がある。
【0006】
また本願出願人による特許文献2には、3本の相電流線の周囲に、幾何学的に定められた位置に2つの磁気検出素子を設けることにより、コンピュータの演算によるクラーク変換経ずに直接二相電流(Iα,Iβ)を得ようとする技術(以下、このような技術を「空間クラーク変換」ともいう)が記載されている。このような空間クラーク変換によれば、従来と比較して磁気検出素子の数を減らしつつまたコンピュータの演算負荷を軽減することができる。
【0007】
しかしながら特許文献2に示された空間クラーク変換では、3本の相電流線や2つ磁気検出素子の配置レイアウトが数パターン程度に限られてしまう。電動車両には様々な部品を効率的に配置する必要があることから、相電流線や磁気検出素子の配置レイアウトの自由度はできるだけ高い方が好ましい。
【0008】
本発明は、ベクトル制御を行う後段のモータ制御装置における演算負荷を軽減できる三相モータの電流検出装置を提供することを目的とし、ひいてはエネルギ効率の改善に寄与することを目的とする。
【課題を解決するための手段】
【0009】
(1)本発明に係る電流検出装置(例えば、後述の電流検出装置3)は、三相モータ(例えば、後述のモータM)の第1電流線(例えば、後述のU相電流線6u)、第2相電流線(例えば、後述のV相電流線6v)及び第3相電流線(例えば、後述のW相電流線6w)を流れる電流を検出するものであって、前記第1相、第2相及び第3相電流線の周囲に設けられたα相磁気検出素子(例えば、後述のα相磁気検出素子Sα)及びβ相磁気検出素子(例えば、後述のβ相磁気検出素子Sβ)と、前記α相及びβ相磁気検出素子それぞれの出力値にα相ゲイン(例えば、後述のα相ゲインGα)及びβ相ゲイン(例えば、後述のβ相ゲインGβ)を乗算したものをα相電流値(例えば、後述のα相電流値Iα)及びβ相電流値(例えば、後述のβ相電流値Iβ)として出力する演算手段(例えば、後述の電流補正演算部22)と、を備え、前記第1相電流線を流れる電流値をI1とし、前記第2相電流線を流れる電流値をI2とし、前記第3相電流線を流れる電流値をI3とし、前記α相磁気検出素子の出力値をVαとし、前記β相磁気検出素子の出力値をVβとした場合、前記第1相、第2相及び第3相電流線に対する前記α相及びβ相磁気検出素子の相対位置並びに検出軸の向きは、“-1/2”以外の係数Xを用いて定められる下記式(1-1)及び(1-2)が成立するように定められ、前記α相及びβ相ゲインの値は、前記α相及びβ相電流値の振幅が等しくなるように設定されることを特徴とする。
TIFF
2025121777000002.tif
34
134
【0010】
(2)この場合、前記α相及びβ相磁気検出素子は、前記第1、第2及び第3相電流線に対し直交する同一の配置面(例えば、後述の配置面P)内に設けられることが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
搬送装置
13日前
本田技研工業株式会社
鞍乗型車両
14日前
本田技研工業株式会社
ガス回収装置
14日前
本田技研工業株式会社
位置推定装置
2日前
本田技研工業株式会社
導体接合方法
2日前
本田技研工業株式会社
電力変換装置
3日前
本田技研工業株式会社
管理システム
3日前
本田技研工業株式会社
物体検出装置
6日前
本田技研工業株式会社
薄板搬送装置
9日前
本田技研工業株式会社
物体検出装置
8日前
本田技研工業株式会社
鞍乗り型車両
今日
本田技研工業株式会社
電力変換装置
7日前
本田技研工業株式会社
電力変換装置
7日前
本田技研工業株式会社
外界認識装置
10日前
本田技研工業株式会社
電流検出装置
8日前
本田技研工業株式会社
電流検出装置
8日前
本田技研工業株式会社
車両制御装置
2日前
本田技研工業株式会社
水電解システム
2日前
本田技研工業株式会社
リーク検出装置
8日前
本田技研工業株式会社
複合動力システム
8日前
本田技研工業株式会社
燃料電池システム
7日前
本田技研工業株式会社
時間変化出力回路
7日前
本田技研工業株式会社
形状計測システム
今日
本田技研工業株式会社
燃料電池システム
7日前
本田技研工業株式会社
車両制御システム
13日前
本田技研工業株式会社
二酸化炭素回収装置
13日前
本田技研工業株式会社
充給電管理システム
6日前
本田技研工業株式会社
サイドスタンド構造
今日
本田技研工業株式会社
二酸化炭素回収装置
10日前
本田技研工業株式会社
座席使用状態認識装置
8日前
本田技研工業株式会社
再生型燃料電池システム
1日前
本田技研工業株式会社
固体二次電池の製造方法
2日前
本田技研工業株式会社
撮像装置の洗浄システム
1日前
本田技研工業株式会社
ステータコアの製造方法
6日前
本田技研工業株式会社
能動型走行効果音発生装置
7日前
本田技研工業株式会社
能動型走行効果音発生装置
7日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ