TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122500
公報種別
公開特許公報(A)
公開日
2025-08-21
出願番号
2024018032
出願日
2024-02-08
発明の名称
時間変化出力回路
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01L
5/00 20060101AFI20250814BHJP(測定;試験)
要約
【課題】力の時間変化値を直接取得することができる時間変化出力回路を提供することを目的とする。
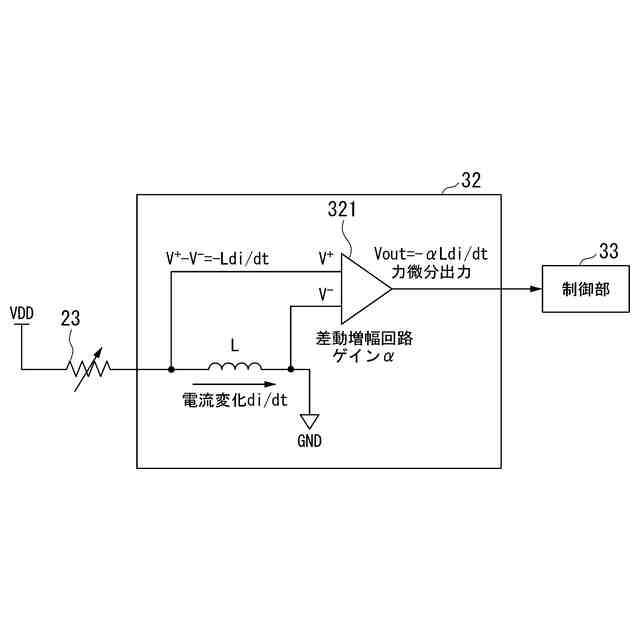
【解決手段】時間変化出力回路は、対象物体との接触力を取得するセンサにより得た値と、センサの値がインダクタンスによる電流変化値と、が入力され、対象物体との接触力の時間変化値を出力する、差動増幅回路、を備える。
【選択図】図6
特許請求の範囲
【請求項1】
対象物体との接触力を取得するセンサにより得た値と、前記センサの値がインダクタンスによる電流変化値と、が入力され、前記対象物体との前記接触力の時間変化値を出力する、差動増幅回路、
を備える時間変化出力回路。
続きを表示(約 760 文字)
【請求項2】
前記センサの一端は、電源電圧に接続され、
前記インダクタンスは、一端が前記センサの他端と前記差動増幅回路の正入力端子に接続され、他端が前記差動増幅回路の負入力端子に接続され、かつ接地され、
前記差動増幅回路は、前記正入力端子に入力される値と、前記負入力端子に入力される電流変化値との差分に、前記差動増幅回路のゲインを乗じた力の時間変化値を出力する、
請求項1に記載の時間変化出力回路。
【請求項3】
抵抗と、バッファ回路と、をさらに備え、
前記センサの値のインダクタンスによる電流変化値の入力が、前記抵抗を介して接地され、かつバッファ回路の入力に接続され、
前記バッファ回路は、前記対象物体との前記接触力を出力する、
請求項1に記載の時間変化出力回路。
【請求項4】
前記センサの一端は、電源電圧に接続され、
前記インダクタンスは、一端が前記センサの他端と前記差動増幅回路の正入力端子に接続され、他端が前記差動増幅回路の負入力端子と、前記抵抗の一端と、前記バッファ回路の第1の入力端子に接続され、
前記抵抗は、他端が接地され、
前記差動増幅回路は、前記正入力端子に入力される値と、前記負入力端子に入力される電流変化値との差分に、前記差動増幅回路のゲインを乗じた力の時間変化値を出力する、
前記バッファ回路は、だ2の入力端子と出力端子とが接続させ、前記対象物体との前記接触力を出力する、
請求項3に記載の時間変化出力回路。
【請求項5】
前記センサは、加わる力に応じて抵抗が変化するセンサである、
請求項1または請求項2に記載の時間変化出力回路。
発明の詳細な説明
【技術分野】
【0001】
本発明は、時間変化出力回路に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
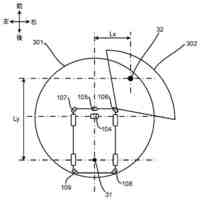
指部を有するロボットハンド等の制御は、例えば指先に設けられた6軸センサまたは指腹に設けられた接触センサによって指先から物体に作用する力を検知して、物体に作用する力が目標作用力に一致するように制御する(例えば、特許文献1参照)。
【0003】
指部で物体を把持する場合、物体の形状等によっては、物体と指先との点接触状態に加え、物体を転がしながら(物体が転がりながら)把持する転がり接触状態、および物体が滑る滑り接触状態それぞれでの把持制御が必要である。点接触状態と転がり接触状態では、接触情報(接触力と接触点)のみで把持物体姿勢が分かる。
【0004】
一方、滑り接触状態では、接触情報だけでは姿勢推定のための情報が不足している。このため、滑り接触状態を抑制するためには、その物理パラメータを既知としなければいけなかった。または、滑り接触状態を抑制するためには、滑りの状況を考慮しない制御手法を用いていた。
【先行技術文献】
【特許文献】
【0005】
特許第589103号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、仮に滑りを考慮した制御に力の時間変化値を用いようとしても、従来技術では、例えばイベントカメラを用いた場合、画像の変化分のみを取得できるのみで、力の時間変化値を直接取得できなかった。このため、従来技術では、滑りを伴う滑り接触において安定して把持させることが困難であった。
【0007】
本発明は、上記の問題点に鑑みてなされたものであって、力の時間変化値を直接取得することができる時間変化出力回路を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)上記目的を達成するため、本発明の一態様に係る時間変化出力回路は、対象物体との接触力を取得するセンサにより得た値(例えばV
+
)と、前記センサの値がインダクタンスによる電流変化値(例えばV
-
)と、が入力され、前記対象物体との前記接触力の時間変化値を出力する、差動増幅回路、を備える時間変化出力回路である。
【0009】
(2)上記(1)の本発明の一態様に係る時間変化出力回路において、前記センサの一端は、電源電圧に接続され、前記インダクタンスは、一端が前記センサの他端と前記差動増幅回路の正入力端子に接続され、他端が前記差動増幅回路の負入力端子に接続され、かつ接地され、前記差動増幅回路は、前記正入力端子に入力される値と、前記負入力端子に入力される電流変化値との差分に、前記差動増幅回路のゲインを乗じた力の時間変化値を出力するようにしてもよい。
【0010】
(3)上記(1)の本発明の一態様に係る時間変化出力回路において、抵抗と、バッファ回路と、をさらに備え、前記センサの値のインダクタンスによる電流変化値の入力が、前記抵抗を介して接地され、かつバッファ回路の入力に接続され、前記バッファ回路は、前記対象物体との前記接触力を出力するようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
16日前
本田技研工業株式会社
回転機械
15日前
本田技研工業株式会社
ロボット
14日前
本田技研工業株式会社
触媒インク
16日前
本田技研工業株式会社
触媒インク
16日前
本田技研工業株式会社
鞍乗り型車両
15日前
本田技研工業株式会社
動力伝達装置
13日前
本田技研工業株式会社
作業システム
15日前
本田技研工業株式会社
鞍乗り型車両
8日前
本田技研工業株式会社
鞍乗り型車両
15日前
本田技研工業株式会社
鞍乗り型車両
6日前
本田技研工業株式会社
クラッチ装置
7日前
本田技研工業株式会社
水電解システム
16日前
本田技研工業株式会社
非接触受電装置
14日前
本田技研工業株式会社
水電解システム
12日前
本田技研工業株式会社
燃料電池システム
12日前
本田技研工業株式会社
回転電機システム
15日前
本田技研工業株式会社
電気化学スタック
7日前
本田技研工業株式会社
冷却装置及び飛行体
9日前
本田技研工業株式会社
冷却装置及び飛行体
16日前
本田技研工業株式会社
電力供給システム及び移動体
8日前
本田技研工業株式会社
通信装置、及び通信制御方法
9日前
本田技研工業株式会社
固体二次電池及びその製造方法
6日前
本田技研工業株式会社
燃料電池用触媒インクの製造方法
12日前
本田技研工業株式会社
燃料電池及び燃料電池の製造方法
12日前
本田技研工業株式会社
電源装置及び電源装置の制御方法
6日前
本田技研工業株式会社
充電制御装置、及び充電制御方法
6日前
本田技研工業株式会社
支援下遠隔操作のための仮想ツール
1日前
本田技研工業株式会社
燃料電池システム及びその制御方法
14日前
本田技研工業株式会社
予測装置、予測方法及び予測プログラム
6日前
本田技研工業株式会社
活物質の分離装置、及び、活物資の分離方法
9日前
本田技研工業株式会社
制御装置、制御方法、及び、制御プログラム
8日前
本田技研工業株式会社
非接触電力伝送システム、送電装置及び移動体
19日前
本田技研工業株式会社
物体検知システム、物体検知方法、及びプログラム
12日前
本田技研工業株式会社
携帯端末、その制御方法、システム、プログラム及び記憶媒体
15日前
本田技研工業株式会社
携帯端末、その制御方法、システム、プログラム及び記憶媒体
15日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ