TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127267
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024023905
出願日
2024-02-20
発明の名称
車両
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
B60W
40/02 20060101AFI20250825BHJP(車両一般)
要約
【課題】効率的なエイミングを実現する。
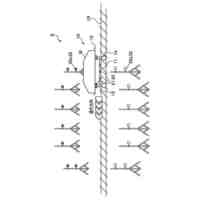
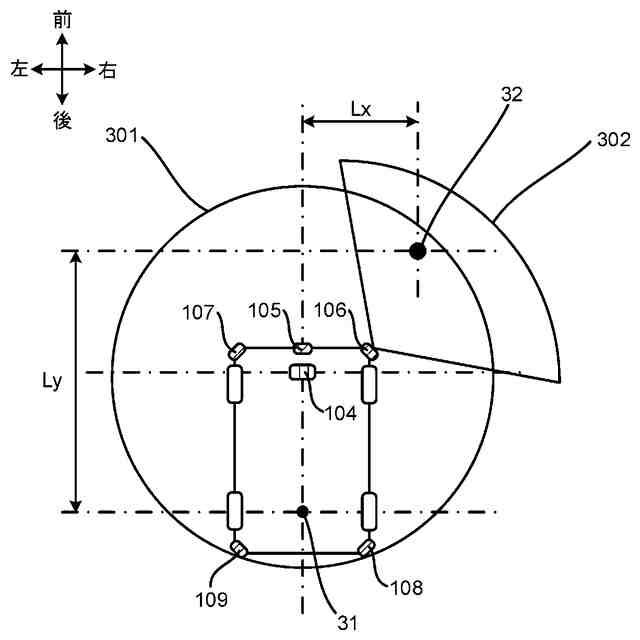
【解決手段】車両であって、回転式の基準ライダと、複数の固定ライダと、前記基準ライダを用いて前記複数の固定ライダのエイミング処理を実行する処理手段とを備える。
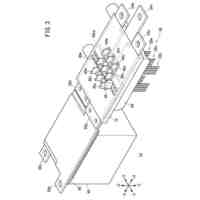
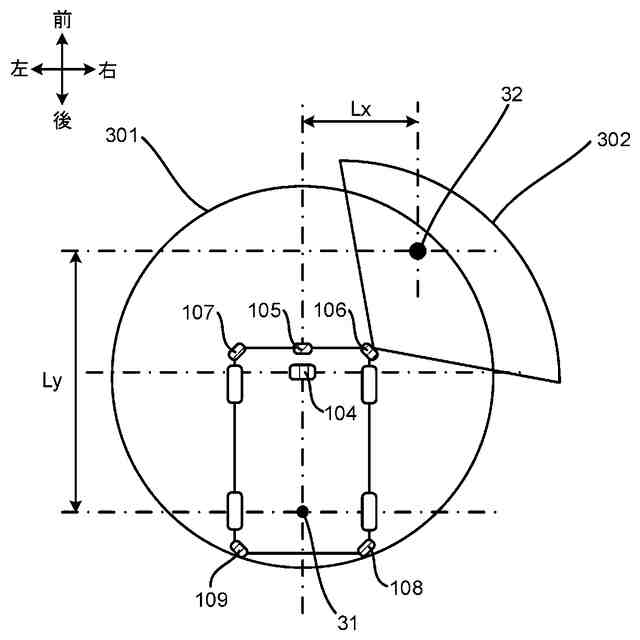
【選択図】 図3
特許請求の範囲
【請求項1】
車両であって、
回転式の基準ライダと、
複数の固定ライダと、
前記基準ライダを用いて前記複数の固定ライダのエイミング処理を実行する処理手段と、
を備えることを特徴とする車両。
続きを表示(約 970 文字)
【請求項2】
前記基準ライダは、Yaw方向で360度の視野角度範囲を有し、
前記複数の固定ライダの各々は、Yaw方向で所定の視野角度範囲を有し、
前記基準ライダの前記視野角度範囲と、各固定ライダの視野角度範囲との少なくとも一部が重複することを特徴とする請求項1に記載の車両。
【請求項3】
昇降可能なスタンドをさらに備え、
前記基準ライダは、前記スタンドに対して固定されており、
前記基準ライダは、前記スタンドの昇降動作に応じて昇降可能であることを特徴とする請求項2に記載の車両。
【請求項4】
前記スタンドは、前記車両の前部且つ上部に設置されていることを特徴とする請求項3に記載の車両。
【請求項5】
前記処理手段は、前記基準ライダが下降された状態で前記複数の固定ライダのエイミング処理を実行することを特徴とする請求項3に記載の車両。
【請求項6】
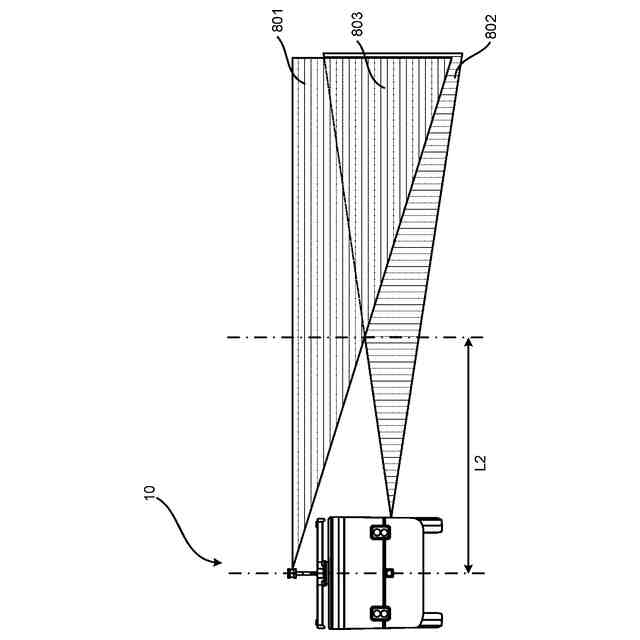
前記基準ライダが下降された状態における前記基準ライダの前記視野角度範囲と各固定ライダの視野角度範囲との重複領域の位置は、前記基準ライダが上昇された状態における前記基準ライダの前記視野角度範囲と各固定ライダの視野角度範囲との重複領域の位置よりも、前記基準ライダに対して近い位置で重複が生じることを特徴とする請求項3に記載の車両。
【請求項7】
前記複数の固定ライダは、
前記車両の前方に配置され、前記前方を中心に所定の視野角度範囲を有する前方ライダと、
前記車両の右前方に配置され、前記右前方の方向を中心に所定の視野角度範囲を有する右前方ライダと、
前記車両の左前方に配置され、前記左前方の方向を中心に所定の視野角度範囲を有する左前方ライダと、
前記車両の右後方に配置され、前記右後方の方向を中心に所定の視野角度範囲を有する右後方ライダと、
前記車両の左後方に配置され、前記左後方の方向を中心に所定の視野角度範囲を有する左後方ライダと、
を備えることを特徴とする請求項1に記載の車両。
【請求項8】
前記基準ライダは、前記車両に対して着脱可能であることを特徴とする請求項1乃至7の何れか1項に記載の車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
車両に搭載されたレーダ、ライダ(LiDAR:Light Detection And Ranging)等の物体検出装置のエイミング(光軸調整)処理が知られている。特許文献1は、特許文献1は、車両の前後軸線上の所定距離前方にエイミング冶具を設置し、エイミング冶具の基準反射体を検出することで上下方向のエイミングを行うことを開示している。
【先行技術文献】
【特許文献】
【0003】
特開2002-131434号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、大がかりなエイミング治具が必要となるため、車両に設置された複数のセンサを効率的にエイミングすることが難しいという課題がある。
【0005】
本発明は、上記の課題に鑑みてなされたものであり、効率的なエイミングを実現するための技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成する本発明の一態様による車両は、
回転式の基準ライダと、
複数の固定ライダと、
前記基準ライダを用いて前記複数の固定ライダのエイミング処理を実行する処理手段と、
を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、効率的なエイミングを実現することが可能となる。
【図面の簡単な説明】
【0008】
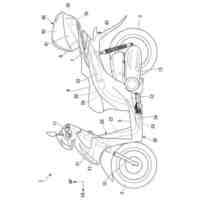
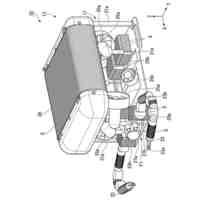
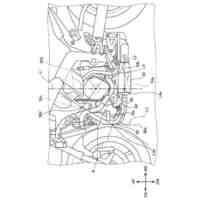
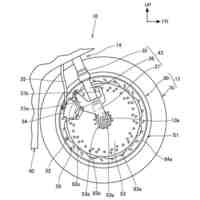
一実施形態に係る車両の外観構成の一例を示す図である。
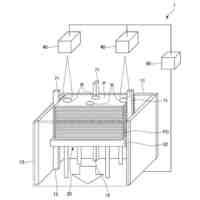
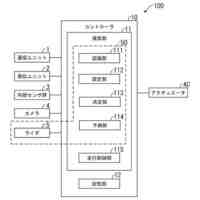
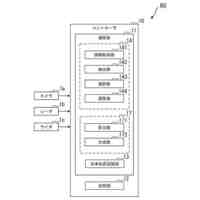
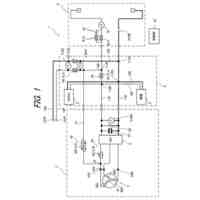
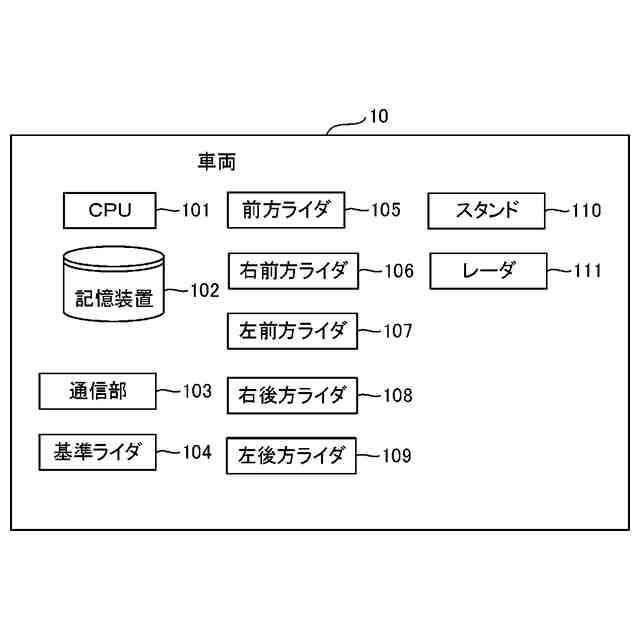
一実施形態に係る車両の構成例を示す図ある。
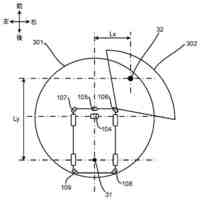
一実施形態に係るエイミング処理の説明図である。
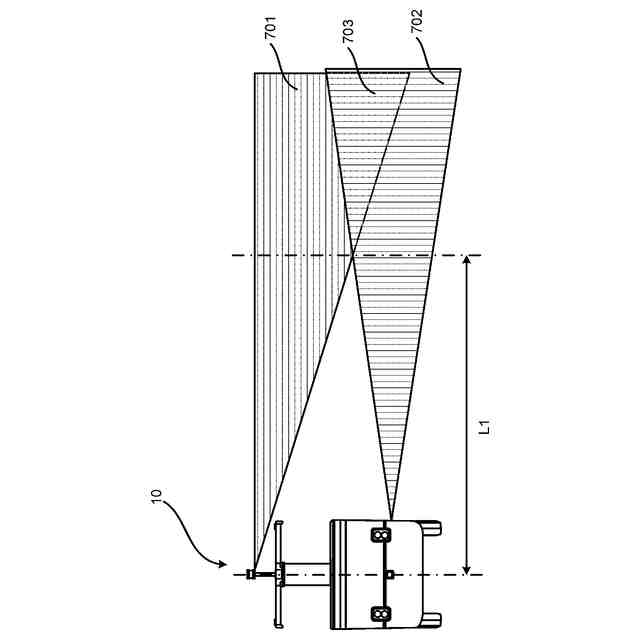
一実施形態に係るスタンド上昇時における基準ライダと固定ライダとの検出範囲の関係を示す図である。
一実施形態に係るスタンド下降時における基準ライダと固定ライダとの検出範囲の関係を示す図である。
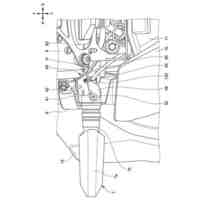
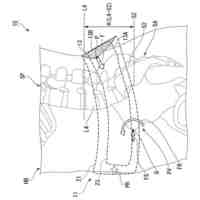
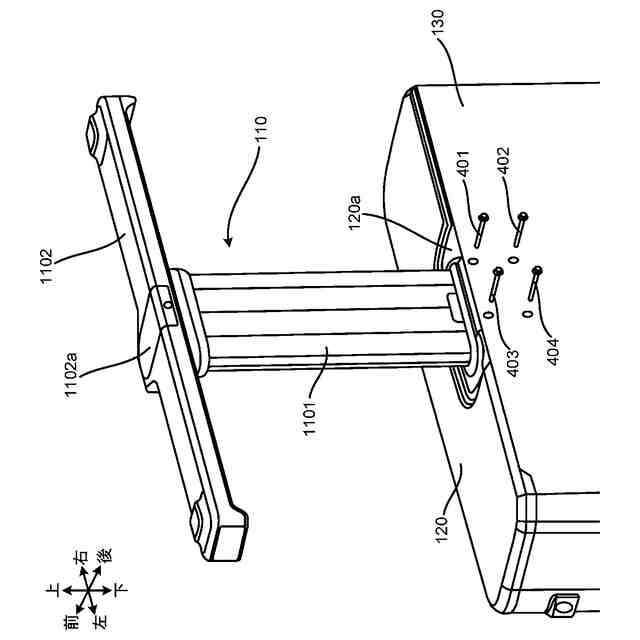
一実施形態に係る車両の部分拡大図である。
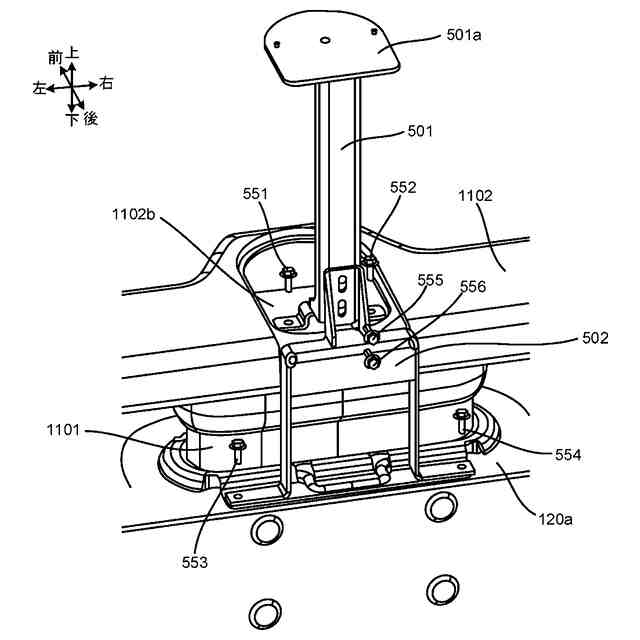
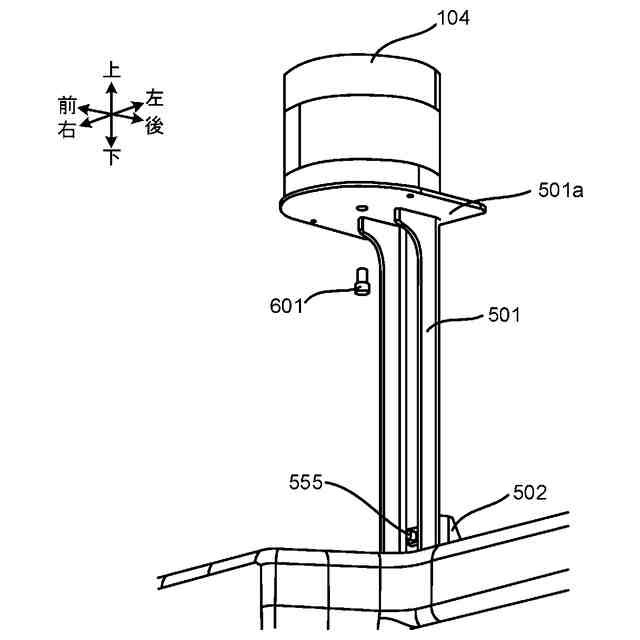
一実施形態に係るスタンドへ基準ライダを取り付けるための構造例を示す図である。
一実施形態に係るスタンドへ基準ライダを取り付けるための構造例を示す図である。
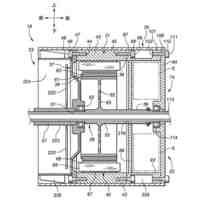
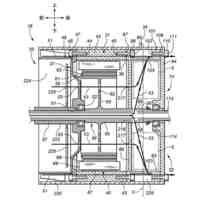
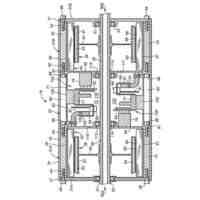
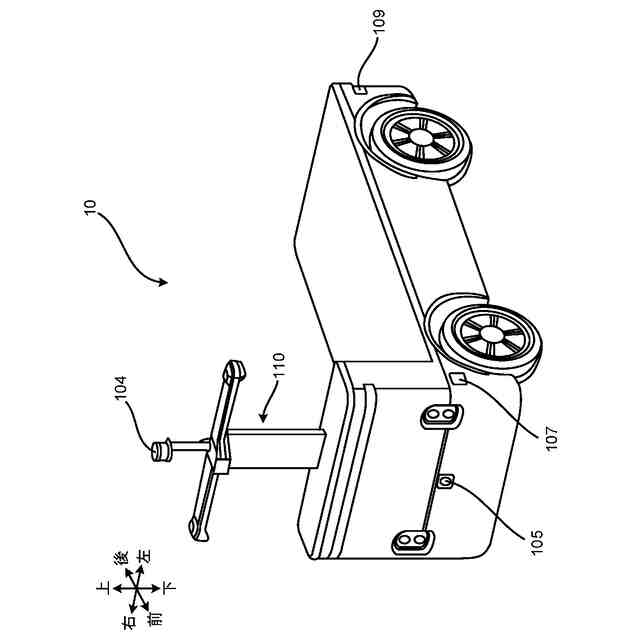
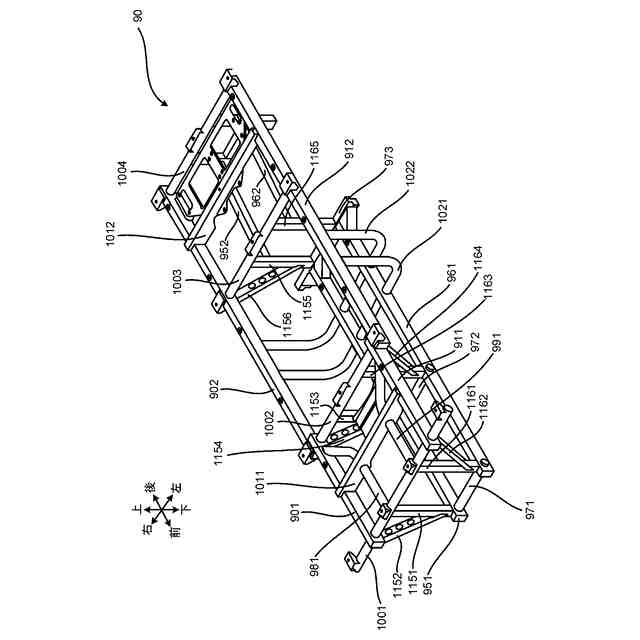
一実施形態に係る車両の内部構造の斜視図である。
一実施形態に係る車両の内部構造の正面図である。
一実施形態に係る車両の内部構造の上面図である。
一実施形態に係る車両の重畳例の説明図である(重畳前)。
一実施形態に係る車両の重畳例の説明図である(重畳後)。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴は任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0010】
各図面中の上下方向、左右方向、前後方向とは、車両に対して規定された方向を示している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
今日
本田技研工業株式会社
板ばね
25日前
本田技研工業株式会社
収納部
19日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
ロボット
25日前
本田技研工業株式会社
積層装置
24日前
本田技研工業株式会社
搬送装置
17日前
本田技研工業株式会社
触媒インク
今日
本田技研工業株式会社
鞍乗型車両
1か月前
本田技研工業株式会社
電池パック
27日前
本田技研工業株式会社
鞍乗型車両
18日前
本田技研工業株式会社
触媒インク
今日
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
鞍乗り型車両
20日前
本田技研工業株式会社
電力変換装置
11日前
本田技研工業株式会社
電力変換装置
11日前
本田技研工業株式会社
電流検出装置
12日前
本田技研工業株式会社
電流検出装置
12日前
本田技研工業株式会社
物体検出装置
12日前
本田技研工業株式会社
薄板搬送装置
13日前
本田技研工業株式会社
外界認識装置
14日前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
ガス回収装置
18日前
本田技研工業株式会社
鞍乗り型車両
20日前
本田技研工業株式会社
物体検出装置
10日前
本田技研工業株式会社
位置決め装置
24日前
本田技研工業株式会社
情報提供装置
26日前
本田技研工業株式会社
情報提供装置
26日前
本田技研工業株式会社
体幹用装着具
28日前
本田技研工業株式会社
画像処理装置
1か月前
本田技研工業株式会社
運転評価装置
1か月前
本田技研工業株式会社
電気駆動装置
1か月前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
電動駆動装置
1か月前
本田技研工業株式会社
蓄電システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ