TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117112
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011802
出願日
2024-01-30
発明の名称
鞍乗り型車両
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
B62K
23/06 20060101AFI20250804BHJP(鉄道以外の路面車両)
要約
【課題】センサ等の部品の配置レイアウトが複雑になることが抑制された簡素な構成で、クラッチレバーが握り位置と非握り位置とに移動したことを精度よく検出することができる鞍乗り型車両を提供する。
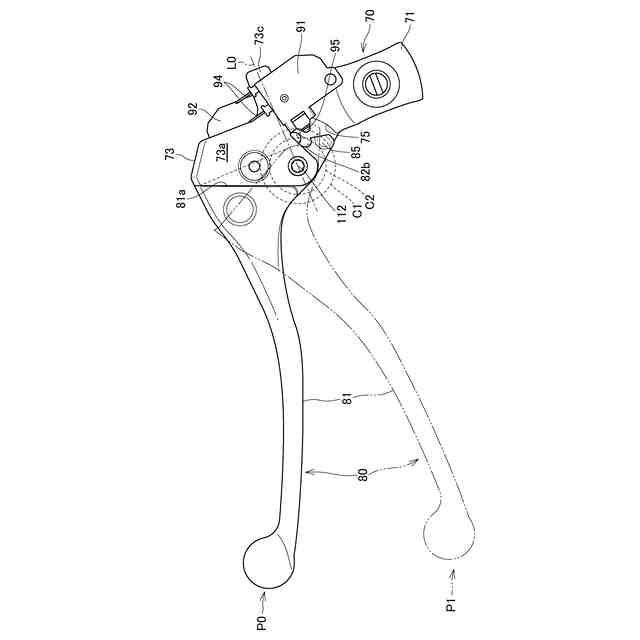
【解決手段】鞍乗り型車両は、クラッチレバー(80)とクラッチレバー(80)を支持する揺動軸(112)とレバーピボット(70)とを備え、第1センサ(91)はレバーピボット(70)の一面(73a)に固定され、第2センサ(92)はレバーピボット(70)の他面(73b)に固定され、第1センサ(91)と第2センサ(92)とは、揺動軸(112)を挟んで同心円状に配置され、第1センサ(91)のスイッチ(95)はクラッチレバー(80)が握り位置(P1)に移動した場合に押され、第2センサ(92)のスイッチ(95)はクラッチレバー(80)が非握り位置(P0)に移動した場合に押される。
【選択図】図11
特許請求の範囲
【請求項1】
クラッチレバー(80)と、前記クラッチレバー(80)を揺動可能に支持する揺動軸(112)と、前記揺動軸(112)が設けられるレバーピボット(70)と、前記クラッチレバー(80)に押されるスイッチ(95)を有する第1センサ(91)および第2センサ(92)と、を備える鞍乗り型車両において、
前記第1センサ(91)は、前記レバーピボット(70)の揺動軸方向一面(73a)に固定され、
前記第2センサ(92)は、前記レバーピボット(70)の揺動軸方向他面(73b)に固定され、
前記第1センサ(91)のスイッチ(95)と前記第2センサ(92)のスイッチ(95)とは、前記揺動軸(112)の軸方向視において、前記揺動軸(112)を挟んで同心円状に配置され、
前記第1センサ(91)のスイッチ(95)は、前記クラッチレバー(80)が握り位置(P1)に移動した場合に押され、
前記第2センサ(92)のスイッチ(95)は、前記クラッチレバー(80)が非握り位置(P0)に移動した場合に押される
ことを特徴とする鞍乗り型車両。
続きを表示(約 770 文字)
【請求項2】
前記クラッチレバー(80)の揺動軸方向一面には、前記握り位置(P1)に移動した場合に前記第1センサ(91)のスイッチ(95)を押す第1凸部(85)が設けられ、
前記クラッチレバー(80)の揺動軸方向他面には、前記非握り位置(P0)に移動した場合に前記第2センサ(92)のスイッチ(95)を押す第2凸部(86)が設けられ、
前記第1凸部(85)と前記第2凸部(86)とは、前記揺動軸(112)の軸方向視において、前記揺動軸(112)を挟んで同心円状に配置される
ことを特徴とする請求項1に記載の鞍乗り型車両。
【請求項3】
前記レバーピボット(70)の揺動軸方向一面(73a)には、前記クラッチレバー(80)の前記第1凸部(85)が進入可能な第1凹部(75)が設けられ、
前記レバーピボット(70)の揺動軸方向他面(73b)には、前記クラッチレバー(80)の前記第2凸部(86)が進入可能な第2凹部(76)が設けられ、
前記第1凹部(75)と前記第2凹部(76)は、前記揺動軸(112)の軸方向視において、前記揺動軸(112)を挟んで同心円状に配置される
ことを特徴とする請求項2に記載の鞍乗り型車両。
【請求項4】
前記レバーピボット(70)には、レバーカバー(100)が締結され、
前記レバーカバー(100)は、車体平面視で、前記第1センサ(91)および前記第2センサ(92)と重なる
ことを特徴とする請求項1から3のいずれかに記載の鞍乗り型車両。
【請求項5】
前記第1センサ(91)と前記第2センサ(92)とは、同一形状である
ことを特徴とする請求項1から3のいずれかに記載の鞍乗り型車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、鞍乗り型車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、クラッチレバーの操作状態を検出するセンサを備えた鞍乗り型車両が知られている(例えば、特許文献1参照)。特許文献1には、クラッチレバーが握られていない場合に接触子が押し込まれ、クラッチレバーが握られた場合は接触子の伸長が許容されるように配置されたクラッチスイッチが記載されている。また、特許文献1には、クラッチスイッチを反対側に配置し、クラッチレバーが握られていない場合に接触子の伸長を許容し、クラッチレバーが握られた場合に接触子を押し込むようにクラッチスイッチを配置することについても記載されている。特許文献1では、クラッチスイッチの検出結果に基づいてアイドルストップ処理を行っている。
【先行技術文献】
【特許文献】
【0003】
特許第5396363号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、基本的には、一つのクラッチスイッチの検出結果に基づいてクラッチレバーの操作状態を検出するため、所定の位置に移動したか否かのみが検出可能になるに過ぎず、所定の位置とは異なる位置にクラッチレバーが移動したことを検出する精度はそれ程求められてはいなかった。
しかし、車両によっては前記検出精度が求められる場合がある。
本発明は、上述した事情に鑑みてなされたものであり、センサ等の部品の配置レイアウトが複雑になることが抑制された簡素な構成で、クラッチレバーが握り位置と非握り位置とに移動したことを精度よく検出することができる鞍乗り型車両を提供することを目的とする。
【課題を解決するための手段】
【0005】
鞍乗り型車両は、クラッチレバーと、前記クラッチレバーを揺動可能に支持する揺動軸と、前記揺動軸が設けられるレバーピボットと、前記クラッチレバーに押されるスイッチを有する第1センサおよび第2センサと、を備える鞍乗り型車両において、前記第1センサは、前記レバーピボットの揺動軸方向一面に固定され、前記第2センサは、前記レバーピボットの揺動軸方向他面に固定され、前記第1センサのスイッチと前記第2センサのスイッチとは、前記揺動軸の軸方向視において、前記揺動軸を挟んで同心円状に配置され、前記第1センサのスイッチは、前記クラッチレバーが握り位置に移動した場合に押され、前記第2センサのスイッチは、前記クラッチレバーが非握り位置に移動した場合に押されることを特徴とする。
【発明の効果】
【0006】
センサ等の部品の配置レイアウトが複雑になることが抑制された簡素な構成で、クラッチレバーが握り位置と非握り位置とに移動したことを精度よく検出することができる鞍乗り型車両を提供することができる。
【図面の簡単な説明】
【0007】
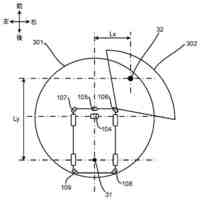
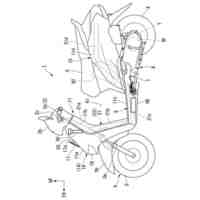
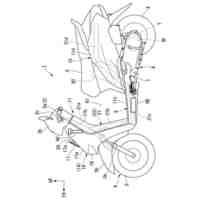
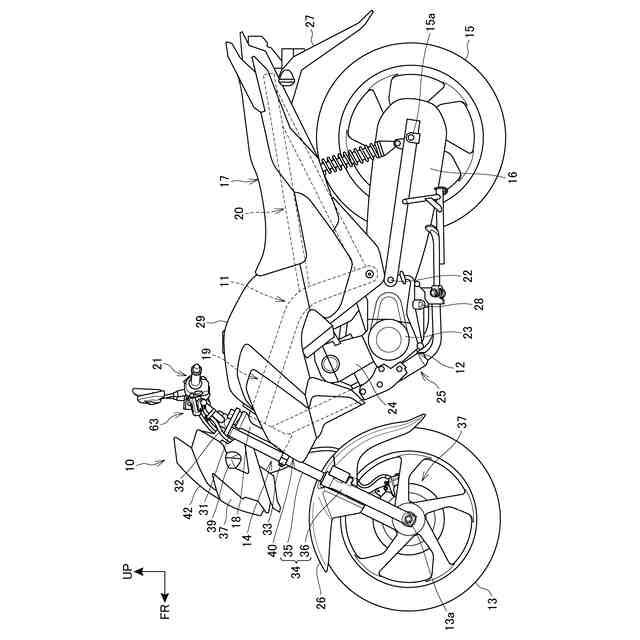
本発明の実施の形態に係る鞍乗り型車両の側面図である。
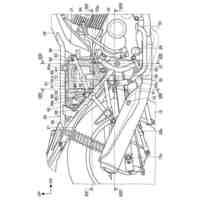
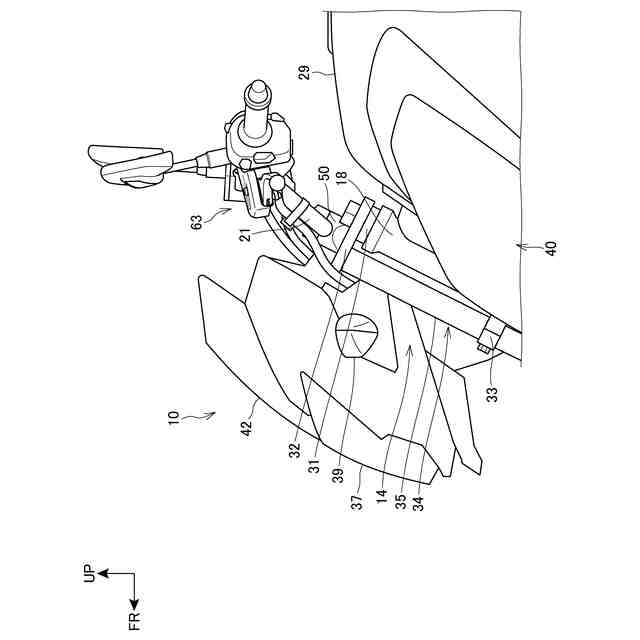
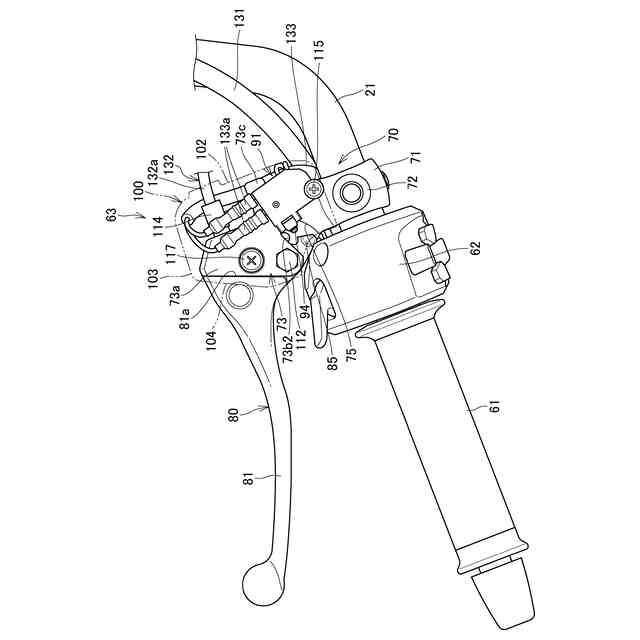
鞍乗り型車両のフロントフォークの上部の周辺部の側面図である。
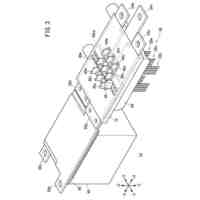
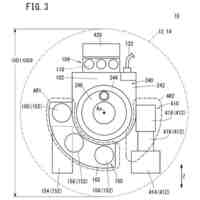
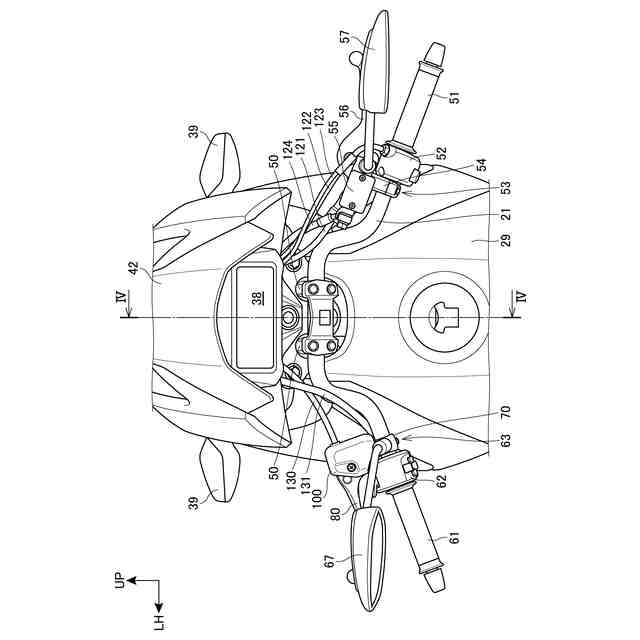
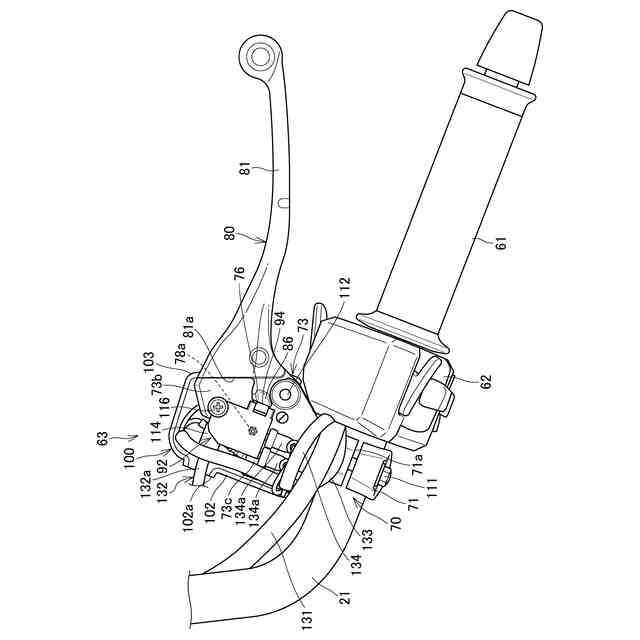
鞍乗り型車両のハンドルの周辺部の平面図である。
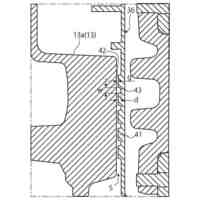
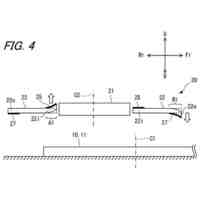
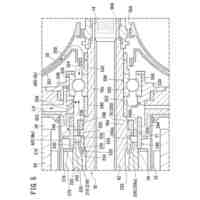
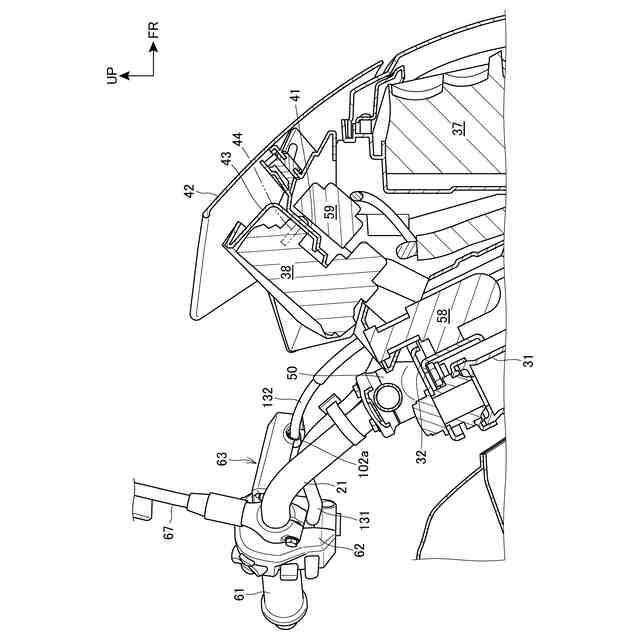
図3のIV-IV線断面図である。
クラッチレバー支持機構の周辺部を上側からの軸方向視で示す図である。
クラッチレバー支持機構の周辺部を下側からの軸方向視で示す図である。
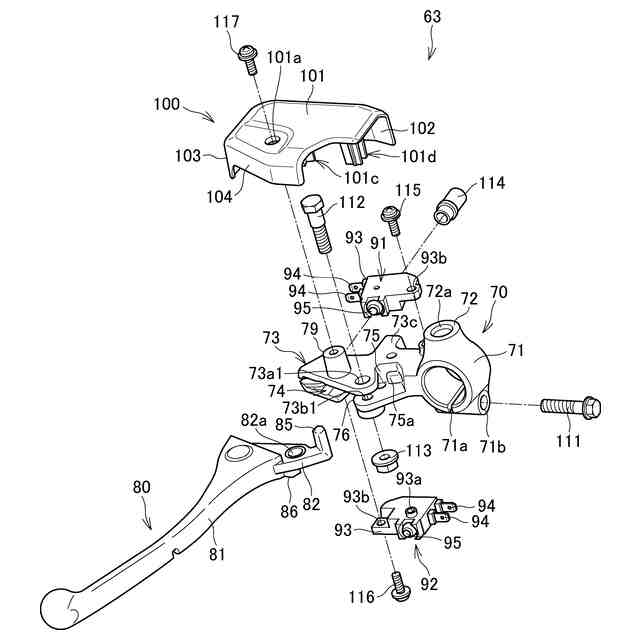
クラッチレバー支持機構の分解斜視図である。
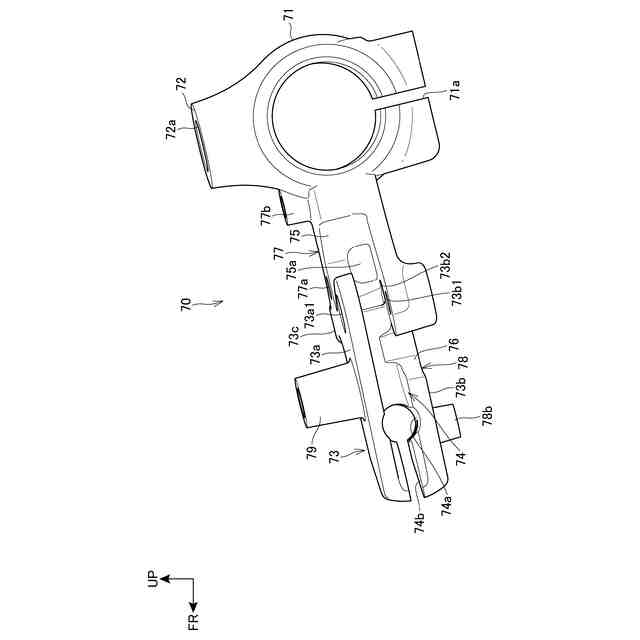
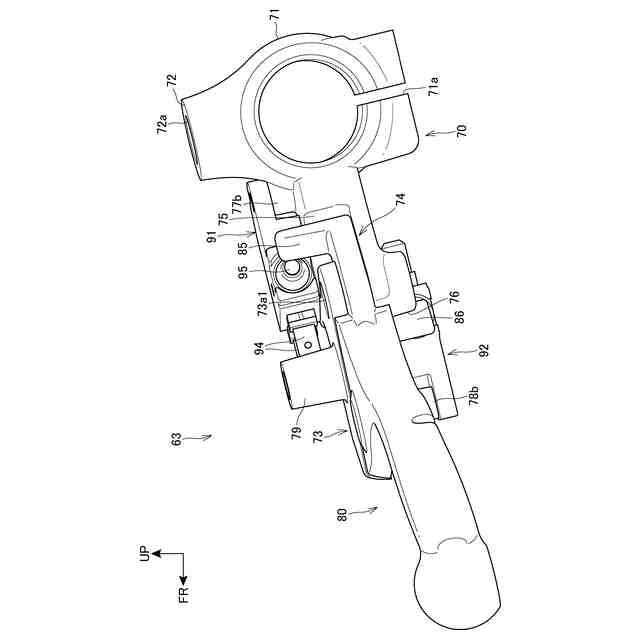
左レバーピボットの左側面図である。
クラッチレバー支持機構の要部左側面図である。
クラッチレバー支持機構の要部正面図である。
上側からの軸方向視の作用説明図である。
下側からの軸方向視の作用説明図である。
【発明を実施するための形態】
【0008】
以下、図面を参照して本発明の実施の形態について説明する。なお、説明中、前後左右および上下といった方向の記載は、特に記載がなければ車体に対する方向と同一とする。また、各図に示す符号FRは車体前方を示し、符号UPは車体上方を示し、符号LHは車体左方を示す。
【0009】
[実施の形態]
図1は、本発明の実施の形態に係る鞍乗り型車両10の側面図である。
鞍乗り型車両10は、車体フレーム11と、車体フレーム11に支持されるパワーユニット12と、前輪13を操舵自在に支持するフロントフォーク14と、後輪15を支持するスイングアーム16と、乗員用のシート17とを備える車両である。
鞍乗り型車両10は、乗員がシート17に跨るようにして着座する車両である。シート17は、車体フレーム11の後部の上方に設けられる。
【0010】
車体フレーム11は、車体フレーム11の前端部に設けられるヘッドパイプ18と、ヘッドパイプ18の後方に位置するフロントフレーム19と、フロントフレーム19の後方に位置するリアフレーム20とを備える。フロントフレーム19の前端部は、ヘッドパイプ18に接続される。
シート17は、リアフレーム20に支持される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
7日前
本田技研工業株式会社
回転機械
6日前
本田技研工業株式会社
搬送装置
24日前
本田技研工業株式会社
ロボット
5日前
本田技研工業株式会社
触媒インク
7日前
本田技研工業株式会社
触媒インク
7日前
本田技研工業株式会社
位置推定装置
13日前
本田技研工業株式会社
物体検出装置
19日前
本田技研工業株式会社
作業システム
6日前
本田技研工業株式会社
車両制御装置
13日前
本田技研工業株式会社
鞍乗り型車両
6日前
本田技研工業株式会社
鞍乗り型車両
6日前
本田技研工業株式会社
電力変換装置
18日前
本田技研工業株式会社
薄板搬送装置
20日前
本田技研工業株式会社
電力変換装置
14日前
本田技研工業株式会社
導体接合方法
13日前
本田技研工業株式会社
電流検出装置
19日前
本田技研工業株式会社
管理システム
14日前
本田技研工業株式会社
外界認識装置
21日前
本田技研工業株式会社
動力伝達装置
4日前
本田技研工業株式会社
電流検出装置
19日前
本田技研工業株式会社
電力変換装置
18日前
本田技研工業株式会社
物体検出装置
17日前
本田技研工業株式会社
鞍乗り型車両
11日前
本田技研工業株式会社
非接触受電装置
5日前
本田技研工業株式会社
水電解システム
3日前
本田技研工業株式会社
水電解システム
7日前
本田技研工業株式会社
水電解システム
13日前
本田技研工業株式会社
リーク検出装置
19日前
本田技研工業株式会社
形状計測システム
11日前
本田技研工業株式会社
燃料電池システム
18日前
本田技研工業株式会社
回転電機システム
6日前
本田技研工業株式会社
複合動力システム
19日前
本田技研工業株式会社
燃料電池システム
18日前
本田技研工業株式会社
燃料電池システム
3日前
本田技研工業株式会社
時間変化出力回路
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ