TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126063
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024022440
出願日
2024-02-16
発明の名称
形状計測システム
出願人
本田技研工業株式会社
代理人
弁理士法人磯野国際特許商標事務所
主分類
G01B
11/24 20060101AFI20250821BHJP(測定;試験)
要約
【課題】 台車によって搬送される対象物の三次元形状を高精度に計測することが可能な形状計測システムを提供する。
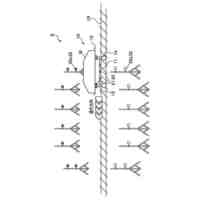
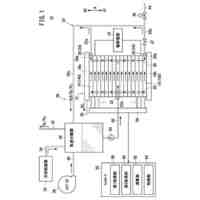
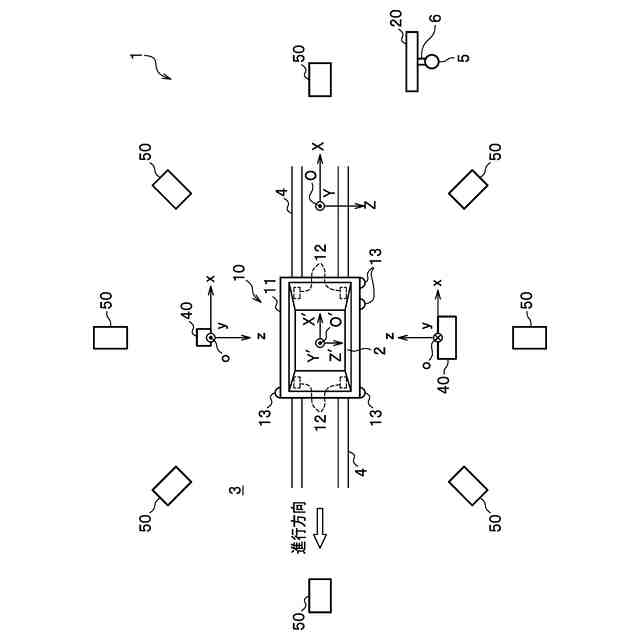
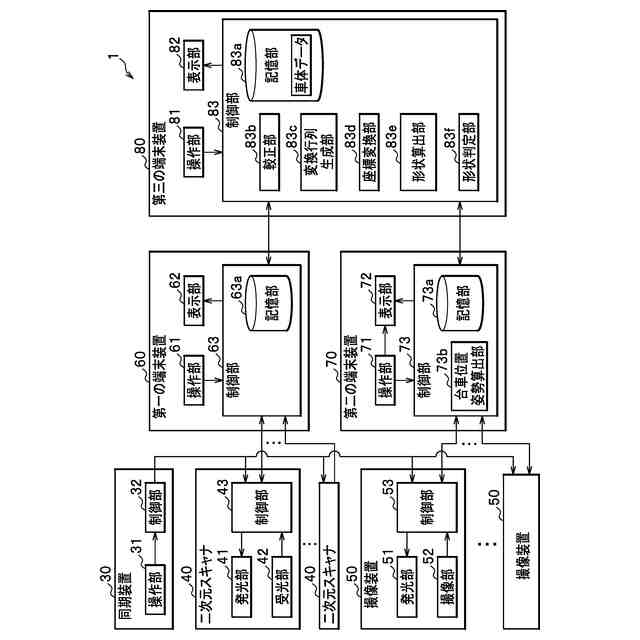
【解決手段】 形状計測システム1は、台車10に搭載されて搬送されているホワイトボディ2の二次元形状データを計測する一以上の二次元スキャナ40と、台車10を撮像する複数の撮像装置50と、複数の撮像装置50の撮像結果に基づいて、台車10の位置及び姿勢を算出する台車位置姿勢算出部と、台車位置姿勢算出部73bの算出結果に基づいて、二次元形状データを、二次元スキャナ40を基準とした三次元座標系から複数の撮像装置50の撮像結果に対応する三次元座標系に変換する座標変換部と、変換された二次元形状データ及び台車位置姿勢算出部の算出結果に基づいて、対象物の三次元形状データを算出する形状算出部と、を備える。
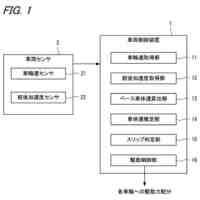
【選択図】図1
特許請求の範囲
【請求項1】
台車に搭載されて搬送されている対象物の二次元形状データを計測する一以上の二次元スキャナと、
前記台車を撮像する複数の撮像装置と、
複数の前記撮像装置の撮像結果に基づいて、前記台車の位置及び姿勢を算出する台車位置姿勢算出部と、
前記台車位置姿勢算出部の算出結果に基づいて、前記二次元形状データを、前記二次元スキャナを基準とした三次元座標系から複数の前記撮像装置の撮像結果に対応する三次元座標系に変換する座標変換部と、
変換された前記二次元形状データ及び前記台車位置姿勢算出部の算出結果に基づいて、前記対象物の三次元形状データを算出する形状算出部と、
を備えることを特徴とする形状計測システム。
続きを表示(約 260 文字)
【請求項2】
一以上の前記二次元スキャナは、前記台車に搭載されて搬送されている前記対象物を計測可能な位置に固定されている
ことを特徴とする請求項1に記載の形状計測システム。
【請求項3】
一以上の前記二次元スキャナの計測タイミングと、複数の前記撮像装置の撮像タイミングとを同期させる同期装置を備える
ことを特徴とする請求項1に記載の形状計測システム。
【請求項4】
前記対象物は、組立後かつ塗装前の車体である
ことを特徴とする請求項1に記載の形状計測システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物の三次元形状を計測する技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
車両の製造時に車体のキズ、へこみ、組付の歪みを修正するため、塗装前の車体であるホワイトボディの形状を計測することが行われている。
対象物としてのホワイトボディの形状計測は、ホワイトボディを静止させた状態で、スキャナを特定の方向に移動させたり回転させたりすることによって行われている。
かかる形状計測の手法では、ホワイトボディを静止状態で設置するための計測専用スペースを必要とする、計測前後における計測専用スペースに対しての移動に手間及び時間を要する、長い計測時間を要する、計測専用の設備を必要とする等といった計測効率及びコスト上の問題があった。
【0003】
これに対し、特許文献1には、搬送中の対象物の三次元形状を計測する際に、外乱による高さ変動量を形状データに基づいて推定し、推定された高さ変動量を差し引いて対象物の三次元形状を取得する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
特許第6380667号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
これに対し、台車によるホワイトボディ(対象物)の搬送においては、高さ方向のズレだけではなく、台車の進行方向に対する横方向へのズレ、台車の回転(ヨー、ピッチ、ロール)方向へのズレが発生するが、特許文献1に記載の技術では、これらのズレに対応することができない。
【0006】
本発明は、前記の点に鑑みてなされたものであり、台車によって搬送される対象物の三次元形状を高精度に計測することが可能な形状計測システムを提供することを課題とする。
【課題を解決するための手段】
【0007】
前記した課題を解決するために、本発明の形状計測システムは、台車に搭載されて搬送されている対象物の二次元形状データを計測する一以上の二次元スキャナと、前記台車を撮像する複数の撮像装置と、複数の前記撮像装置の撮像結果に基づいて、前記台車の位置及び姿勢を算出する台車位置姿勢算出部と、前記台車位置姿勢算出部の算出結果に基づいて、前記二次元形状データを、前記二次元スキャナを基準とした三次元座標系から複数の前記撮像装置の撮像結果に対応する三次元座標系に変換する座標変換部と、変換された前記二次元形状データ及び前記台車位置姿勢算出部の算出結果に基づいて、前記対象物の三次元形状データを算出する形状算出部と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によると、台車の進行方向に対する横方向へのズレ、台車の回転(ヨー、ピッチ、ロール)方向へのズレを補正しながら対象物の三次元形状を計測するので、対象物の三次元形状を高精度に計測することができる。
【図面の簡単な説明】
【0009】
本発明の実施形態に係る形状計測システムを模式的に示す平面図である。
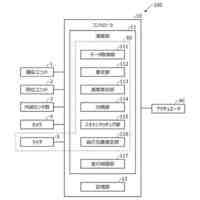
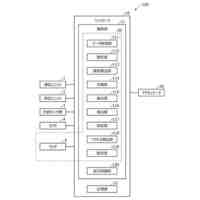
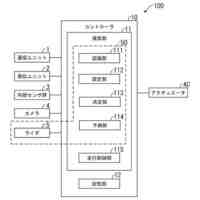
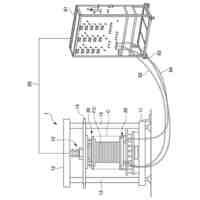
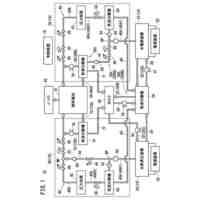
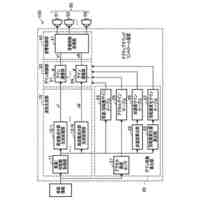
本発明の実施形態に係る形状計測システムを模式的に示すブロック図である。
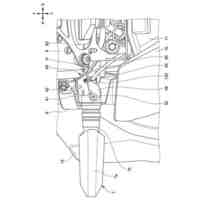
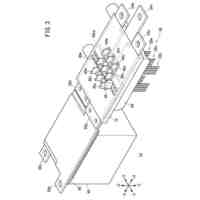
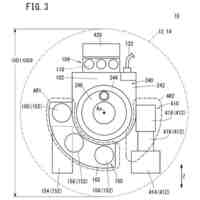
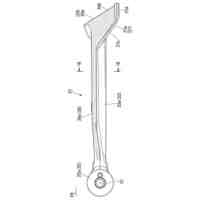
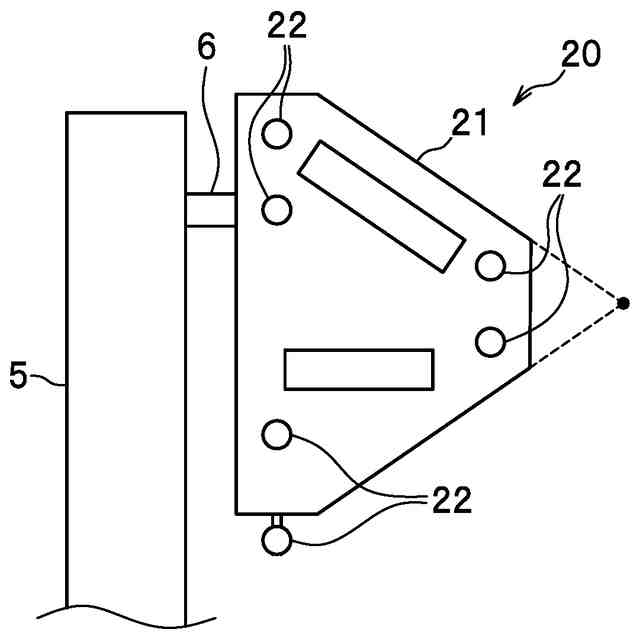
治具を模式的に示す図である。
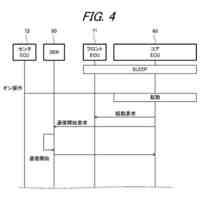
第一の端末装置によってファイル化された、二次元スキャナの計測結果の例を模式的に示す表である。
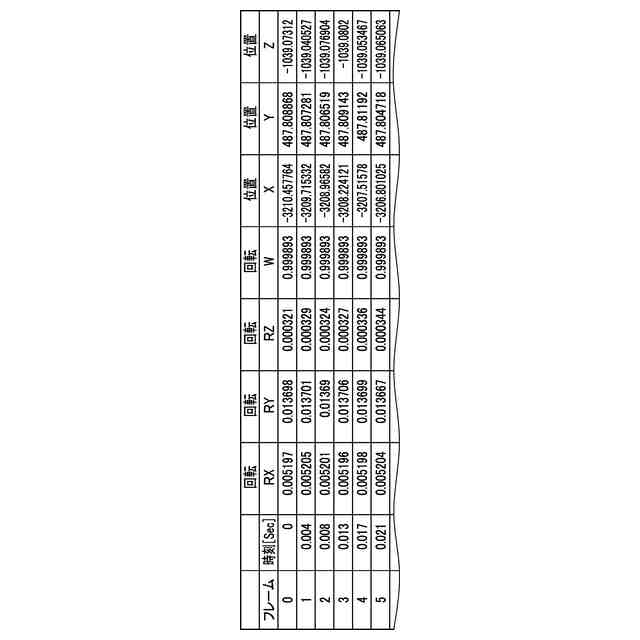
第二の端末装置によってファイル化された、台車の位置及び姿勢の算出結果の例を模式的に示す表である。
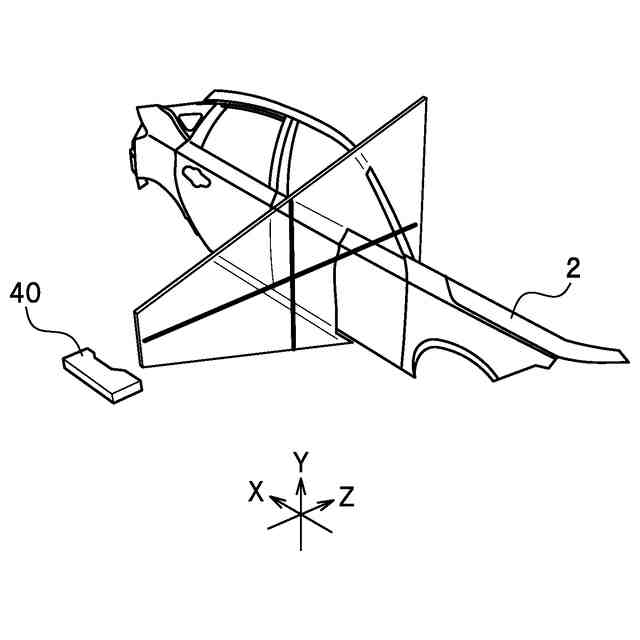
二次元スキャナによる対象物の計測を模式的に示す斜視図である。
二次元スキャナによる対象物の計測を模式的に示す斜視図であり、対象物の姿勢変化の補正を説明するための図である。
【発明を実施するための形態】
【0010】
次に、本発明の実施形態について、本発明の形状計測システムを車体(ホワイトボディ)の形状計測に適用した場合を例にとり、適宜図面を参照しながら詳細に説明する。以下の説明において、同一の構成には同一の符号を付し、重複する説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
搬送装置
13日前
本田技研工業株式会社
鞍乗型車両
14日前
本田技研工業株式会社
ガス回収装置
14日前
本田技研工業株式会社
位置推定装置
2日前
本田技研工業株式会社
導体接合方法
2日前
本田技研工業株式会社
電力変換装置
3日前
本田技研工業株式会社
管理システム
3日前
本田技研工業株式会社
物体検出装置
6日前
本田技研工業株式会社
薄板搬送装置
9日前
本田技研工業株式会社
物体検出装置
8日前
本田技研工業株式会社
鞍乗り型車両
今日
本田技研工業株式会社
電力変換装置
7日前
本田技研工業株式会社
電力変換装置
7日前
本田技研工業株式会社
外界認識装置
10日前
本田技研工業株式会社
電流検出装置
8日前
本田技研工業株式会社
電流検出装置
8日前
本田技研工業株式会社
車両制御装置
2日前
本田技研工業株式会社
水電解システム
2日前
本田技研工業株式会社
リーク検出装置
8日前
本田技研工業株式会社
複合動力システム
8日前
本田技研工業株式会社
燃料電池システム
7日前
本田技研工業株式会社
時間変化出力回路
7日前
本田技研工業株式会社
形状計測システム
今日
本田技研工業株式会社
燃料電池システム
7日前
本田技研工業株式会社
車両制御システム
13日前
本田技研工業株式会社
二酸化炭素回収装置
13日前
本田技研工業株式会社
充給電管理システム
6日前
本田技研工業株式会社
サイドスタンド構造
今日
本田技研工業株式会社
二酸化炭素回収装置
10日前
本田技研工業株式会社
座席使用状態認識装置
8日前
本田技研工業株式会社
再生型燃料電池システム
1日前
本田技研工業株式会社
固体二次電池の製造方法
2日前
本田技研工業株式会社
撮像装置の洗浄システム
1日前
本田技研工業株式会社
ステータコアの製造方法
6日前
本田技研工業株式会社
能動型走行効果音発生装置
7日前
本田技研工業株式会社
能動型走行効果音発生装置
7日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ