TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025134085
公報種別
公開特許公報(A)
公開日
2025-09-16
出願番号
2025025821
出願日
2025-02-20
発明の名称
支援下遠隔操作のための仮想ツール
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
G06F
3/01 20060101AFI20250908BHJP(計算;計数)
要約
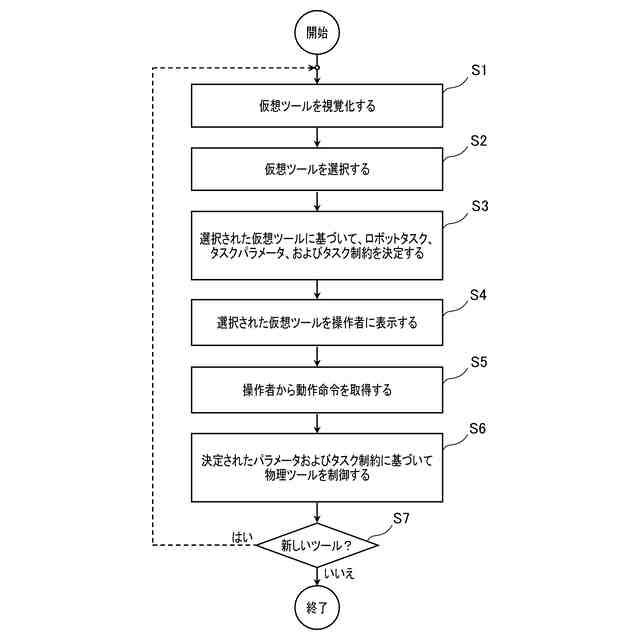
【課題】遠隔操作システムに命令するためのユーザインターフェース、および遠隔操作システムを提供すること。
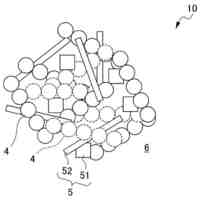
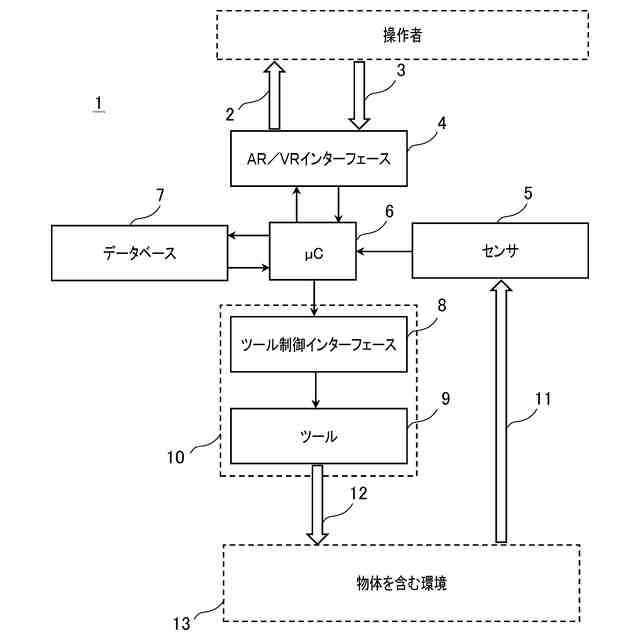
【解決手段】ユーザインターフェースは、少なくとも1つのツールの少なくとも1つの仮想ツール表現を、遠隔操作システムの操作者に出力するように構成された出力装置と、出力された少なくとも1つの仮想ツール表現の1つを選択するための操作者からの選択命令を取得するように構成された入力装置とを含む。ユーザインターフェースは、制御回路であって、選択された仮想ツール表現に基づいてタスクを決定し、出力装置を介して、操作者への選択された仮想ツール表現の表示を制御し、入力装置を介して操作者から動作命令を取得し、決定されたタスクに基づいて取得された動作命令を解釈し、解釈された動作命令および選択された仮想ツール表現に基づいて、少なくとも1つのツールを使用して動作を行うように遠隔操作システムを制御する、ように構成された制御回路をさらに含む。
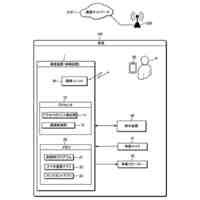
【選択図】図1
特許請求の範囲
【請求項1】
遠隔操作システム(1)に動作を行うように命令するためのユーザインターフェースであって、
少なくとも1つのツール(9)の少なくとも1つの仮想ツール表現(21、22、23)を、前記遠隔操作システム(1)の操作者に出力するように構成された出力装置(4)と、
前記出力された少なくとも1つの仮想ツール表現(21、22、23)の1つを選択するための前記操作者からの選択命令を受け取るように構成された入力装置(4)と、
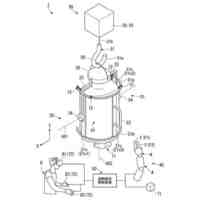
制御回路(6)であって、
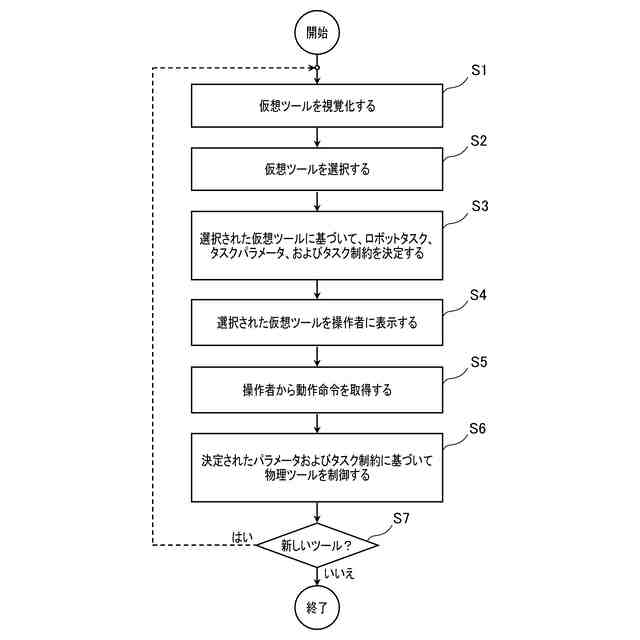
前記選択された仮想ツール表現(21、22、23)に対するタスクを決定し、
前記出力装置(4)を介して、前記操作者への前記選択された仮想ツール表現(21、22、23)の表示を制御し、
前記入力装置(4)を介して前記操作者から動作命令を取得し、
前記決定されたタスクに基づいて前記取得された動作命令を解釈し、
前記解釈された動作命令および前記選択された仮想ツール表現(21、22、23)に基づいて、前記少なくとも1つのツール(9)を使用して動作を行うように前記遠隔操作システム(1)を制御する
ように構成された制御回路(6)と、を備える、ユーザインターフェース。
続きを表示(約 1,500 文字)
【請求項2】
前記制御回路が、
前記選択された仮想ツール表現(21、22、23)に基づいてタスクパラメータおよびタスク制約を決定し、
前記決定されたタスク、タスクパラメータ、およびタスク制約に基づいて、前記取得された動作命令を解釈する
ように構成される、請求項1に記載のユーザインターフェース。
【請求項3】
前記出力装置(4)が、複数のツール(9)の複数の仮想ツール表現(21、22、23)を前記操作者に出力するように構成され、
前記動作が、前記複数のツール(9)のうちの異なるツール(9)を使用することにより、前記選択された仮想ツール表現(21、22、23)に対応するツールの使用を模倣する、請求項1に記載のユーザインターフェース。
【請求項4】
各仮想ツール表現(21、22、23)が、少なくとも1つの調節可能なツール制約を備え、
前記調節可能なツール制約が、方向の制約、大きさの制約、最大速度設定、および物体から除去される材料の最大厚、の少なくとも1つを含む、請求項1に記載のユーザインターフェース。
【請求項5】
前記少なくとも1つの仮想ツール表現(21、22、23)が、前記調節可能なツール制約を適合するために前記操作者によって操作されるように構成されている要素を含む、請求項4に記載のユーザインターフェース。
【請求項6】
前記少なくとも1つの仮想ツール表現(21、22、23)が、調節可能なツール制約を数値的に適合するために前記操作者によって操作されるように構成されている動作要素、特に、仮想のスライドコントロールまたは回転コントロールを含む、請求項4に記載のユーザインターフェース。
【請求項7】
前記ユーザインターフェースが、仮想現実システムまたは拡張現実システムの一部である、請求項1に記載のユーザインターフェース。
【請求項8】
前記入力装置(4)がポインタデバイスを含む、請求項1に記載のユーザインターフェース。
【請求項9】
ユーザインターフェースを含む遠隔操作システムであって、前記ユーザインターフェースが、
少なくとも1つのツール(9)の少なくとも1つの仮想ツール表現(21、22、23)を、前記遠隔操作システムの操作者に出力するように構成された出力装置(4)と、
前記出力された少なくとも1つの仮想ツール表現(21、22、23)の1つを選択するための前記操作者からの選択命令を受け取るように構成された入力装置(4)と、
制御回路(6)であって、
前記選択された仮想ツール表現(21、22、23)に対するタスクを決定し、
前記出力装置(4)を介して、前記操作者への前記選択された仮想ツール表現(21、22、23)の表示を制御し、
前記入力装置(4)を介して前記操作者から動作命令を取得し、
前記決定されたタスクに基づいて前記取得された動作命令を解釈し、
前記解釈された動作命令および前記選択された仮想ツール表現(21、22、23)に基づいて、前記少なくとも1つのツール(9)を使用して動作を行うように前記遠隔操作システムを制御する
ように構成された制御回路(6)と、を備える、遠隔操作システム。
【請求項10】
前記遠隔操作システムが、複数のツール(9)の動作能力に対応する複数の動作を行うように構成された多目的物理ツール(9)を含む、請求項9に記載の遠隔操作システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、仮想現実の一般的な分野、および遠隔操作システムのためのインターフェースに関する。詳細には、遠隔操作システムのためのユーザインターフェース、遠隔操作システムを制御するためのコンピュータ実装方法、および対応するプログラムが開示される。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
人工知能(AI:artificial intelligence)で支援される遠隔操作では、支援なし、中程度のタスク支援、およびロボットの完全な自律性という支援の幅が存在する。現在の遠隔操作システムは、ユーザインターフェース(UI)に仮想現実(VR:virtual reality)または拡張現実(AR:augmented reality)システムを適用しており、それらの効率は、支援機能の設定、嗜好、および制約の直感的で効率的な伝達に依拠する。
【0003】
遠隔操作は、遠方操作(remote operation)と呼ばれることもあり、距離を隔てて位置するシステムまたは機械の操作を意味する。遠隔操作は、人間-機械システムの例である。遠隔操作システムは、手動の制御から、自律デバイス(ロボット)の完全な自動操縦に及ぶ自律性の幅を提供する。
【0004】
遠隔操作において、最新技術は、汎用アクチュエータを備えるロボットと、操作者がそのアクチュエータの動きを直接制御することを含む。汎用アクチュエータの典型的な例は把持マニピュレータである。それでも、多くの場合は操作者によるマニピュレータの直接の制御がマニピュレータの動きを提供し、これは非効率的で不正確である。
【0005】
遠隔操作の分野の代替手法は、ロボットに、固有のツールアタッチメントを含む特殊アクチュエータを搭載する。代替として、ロボットが、スパナのような特定のツールを保持している汎用アクチュエータを備え、操作者がそのツールを1:1の手動制御モードで制御する。この代替手法の効率は、汎用アクチュエータを搭載したロボットを利用する手法と比べると向上する可能性があるが、この代替手法は、ロボットが特殊ツールを搭載することを必要とする。
【0006】
実践では、ロボットは、トルクレンチのような物理ツールに対する制約を設定するのが難しいことが多く、またはさらには物理ツールに制約を設定することが可能でない場合もある。
【0007】
代替として、ロボットは、例えば動力ドリルなどの特殊ツールを使用することがあるが、これは、汎用ツールに比べて柔軟性が低く、しばしばはるかに高価である。
【0008】
一般に、AI支援の遠隔操作では、最新技術は、テキストメニューから明示的に、またはVRユーザインターフェースでボタンを押す、もしくはスライダーを動かすことにより、ロボットによって実行される特定の支援モードを選択する負担を操作者に課し、それらは直感的に使用することができない。具体的な例として、操作者は、VRユーザインターフェースのダイヤルを使用して、トルクレンチの最終トルクおよび回転速度を選択する。
【0009】
米国特許第9,272,418(B1)号は、ロボットに教示能力を学習させることが可能な、遠隔操作の操作者用のユーザインターフェースを開示している。ロボットの各能力は、操作者からのユーザ入力として制約の組を必要とする。ユーザインターフェースは、ロボットの各能力に関するそれぞれの制約の入力を支援するインターフェース要素を提供する。操作者は、各能力が何を行うのか、および各能力に対してどの制約を与えるべきかを知っていなければならない。操作者は、ユーザインターフェースで所望のロボットの能力を選択し、選択した能力について所望の制約を設定する。意図される動作をうまく行うためには、必要な制約を事前に設定する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0010】
述べられた遠隔操作システムの態様は、改良された遠隔操作システムおよび遠隔操作システムのための改良されたユーザインターフェースが望ましいことを示唆している。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
15日前
本田技研工業株式会社
回転機械
14日前
本田技研工業株式会社
ロボット
13日前
本田技研工業株式会社
触媒インク
15日前
本田技研工業株式会社
触媒インク
15日前
本田技研工業株式会社
作業システム
14日前
本田技研工業株式会社
鞍乗り型車両
14日前
本田技研工業株式会社
鞍乗り型車両
14日前
本田技研工業株式会社
動力伝達装置
12日前
本田技研工業株式会社
鞍乗り型車両
19日前
本田技研工業株式会社
鞍乗り型車両
7日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
クラッチ装置
6日前
本田技研工業株式会社
水電解システム
11日前
本田技研工業株式会社
水電解システム
15日前
本田技研工業株式会社
非接触受電装置
13日前
本田技研工業株式会社
回転電機システム
14日前
本田技研工業株式会社
形状計測システム
19日前
本田技研工業株式会社
電気化学スタック
6日前
本田技研工業株式会社
燃料電池システム
11日前
本田技研工業株式会社
冷却装置及び飛行体
8日前
本田技研工業株式会社
サイドスタンド構造
19日前
本田技研工業株式会社
冷却装置及び飛行体
15日前
本田技研工業株式会社
航空機用電動駆動装置
18日前
本田技研工業株式会社
撮像装置の洗浄システム
20日前
本田技研工業株式会社
再生型燃料電池システム
20日前
本田技研工業株式会社
電力供給システム及び移動体
7日前
本田技研工業株式会社
通信装置、及び通信制御方法
8日前
本田技研工業株式会社
燃料電池の発電制御システム
20日前
本田技研工業株式会社
固体二次電池及びその製造方法
5日前
本田技研工業株式会社
燃料電池及び燃料電池の製造方法
11日前
本田技研工業株式会社
燃料電池用触媒インクの製造方法
11日前
本田技研工業株式会社
電源装置及び電源装置の制御方法
5日前
本田技研工業株式会社
充電制御装置、及び充電制御方法
5日前
本田技研工業株式会社
燃料電池システム及びその制御方法
13日前
本田技研工業株式会社
固体高分子型燃料電池の活性化方法
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ