TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018448
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122148
出願日
2023-07-27
発明の名称
制御装置及び制御方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20250130BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワーク毎に当該ワークを良好に把持することができる把持点を導き出せる制御装置を実現する。
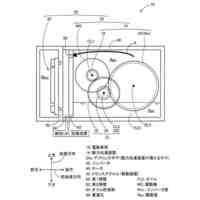
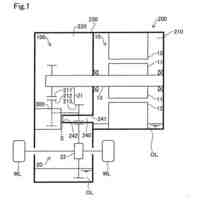
【解決手段】本開示の一形態に係る制御装置(5)は、ワーク(W)の重心点(G)をロボットアーム(2)に設けられた力覚センサ(3)の検出情報に基づいて導き出し、ワーク(W)の重心点(G)とワーク(W)の把持点(P)とのズレ量と、ロボットアーム(2)の関節情報と、を入力とし、ワーク(W)の把持点(P)を出力とする深層強化学習モデルによって、ワーク(W)の重心点(G)に対してズレ量が最小となるワーク(W)の把持点(P)を学習する強化学習部(5b)を備える。強化学習部(5b)は、深層強化学習モデルによってワーク(W)の把持点(P)を再学習する。
【選択図】図1
特許請求の範囲
【請求項1】
ワークを拾い上げて移動させるロボットアームの制御装置であって、
前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点を前記ロボットアームに設けられた力覚センサの検出情報に基づいて導き出し、前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点と前記ワークの把持点とのズレ量と、前記ロボットアームで前記ワークを拾い上げた際の前記ロボットアームの関節情報と、を入力とし、前記ワークの把持点を出力とする深層強化学習モデルによって、前記ワークの重心点に対してズレ量が最小となる前記ワークの把持点を学習する強化学習部と、
前記深層強化学習モデルによって学習した前記ワークの把持点で前記ワークを拾い上げるように、前記ロボットアームの関節情報を導き出す経路生成部と、
前記導き出したロボットアームの関節情報に基づいて前記ロボットアームを制御する制御部と、
を備え、
前記強化学習部は、前記深層強化学習モデルによって、前記導き出したロボットアームの関節情報に基づいて前記ロボットアームを制御して前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点と前記ワークの把持点とのズレ量と、前記導き出したロボットアームの関節情報と、を用いて、前記ワークの把持点を再学習する、制御装置。
続きを表示(約 1,200 文字)
【請求項2】
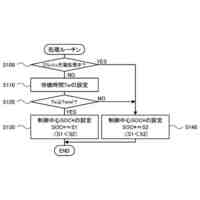
前記ロボットアームで拾い上げるワークの種類並びに拾い上げるワークの順番に関する情報、及び学習済みワークの種類に関する情報を取得し、前記ロボットアームで拾い上げるワークの種類並びに拾い上げるワークの順番に関する情報、及び学習済みワークの種類に関する情報に基づいて、今回、拾い上げるワークが学習済みか否かを判定する判定部を備え、
前記今回、拾い上げるワークが学習済みの場合、前記深層強化学習モデルによる学習を省略し、前記今回、拾い上げるワークが学習済みでない場合、前記深層強化学習モデルによる学習を行う、請求項1に記載の制御装置。
【請求項3】
前記ロボットアームの関節情報として前記ロボットアームの各関節部の角度情報の他に、前記ロボットアームの関節部を駆動するモータの角速度情報、角加速度情報又はトルク情報の少なくとも何れか1つを含む、請求項1又は2に記載の制御装置。
【請求項4】
ワークを拾い上げて移動させるロボットアームの制御方法であって、
前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点を前記ロボットアームに設けられた力覚センサの検出情報に基づいて導き出す工程と、
前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点と前記ワークの把持点とのズレ量と、前記ロボットアームで前記ワークを拾い上げた際の前記ロボットアームの関節情報と、を入力とし、前記ワークの把持点を出力とする深層強化学習モデルによって、前記ワークの重心点に対してズレ量が最小となる前記ワークの把持点を学習する工程と、
前記深層強化学習モデルによって学習した前記ワークの把持点で前記ワークを拾い上げるように、前記ロボットアームの関節情報を導き出す工程と、
前記導き出したロボットアームの関節情報に基づいて前記ロボットアームを制御する工程と、
前記深層強化学習モデルによって、前記導き出したロボットアームの関節情報に基づいて前記ロボットアームを制御して前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点と前記ワークの把持点とのズレ量と、前記導き出したロボットアームの関節情報と、を用いて、前記ワークの把持点を再学習する工程と、
を備える、制御方法。
【請求項5】
前記ロボットアームで拾い上げるワークの種類並びに拾い上げるワークの順番に関する情報、及び学習済みワークの種類に関する情報を取得し、前記ロボットアームで拾い上げるワークの種類並びに拾い上げるワークの順番に関する情報、及び学習済みワークの種類に関する情報に基づいて、今回、拾い上げるワークが学習済みか否かを判定する工程を備え、
前記今回、拾い上げるワークが学習済みの場合、前記深層強化学習モデルによる学習を省略し、前記今回、拾い上げるワークが学習済みでない場合、前記深層強化学習モデルによる学習を行う、請求項4に記載の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置及び制御方法に関し、例えば、ワークを拾い上げて移動させるロボットアームの制御装置及び制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
例えば、特許文献1の制御装置は、ロボットアームでワークを拾い上げた際の当該ワークの重心点をロボットアームに設けられた力覚センサの検出情報に基づいて算出し、算出した重心点を参照してワークの種類を判定している。
【先行技術文献】
【特許文献】
【0003】
特開2022-67995号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本出願人は、以下の課題を見出した。特許文献1の制御装置は、ワークの種類を判別することはできるが、ワーク毎に当該ワークを良好に拾い上げることができる把持点を導き出せない課題を有する。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、ワーク毎に当該ワークを良好に拾い上げることができる把持点を導き出せる制御装置及び制御方法を実現する。
【課題を解決するための手段】
【0006】
本開示の一態様に係る制御装置は、ワークを拾い上げて移動させるロボットアームの制御装置であって、
前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点を前記ロボットアームに設けられた力覚センサの検出情報に基づいて導き出し、前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点と前記ワークの把持点とのズレ量と、前記ロボットアームで前記ワークを拾い上げた際の前記ロボットアームの関節情報と、を入力とし、前記ワークの把持点を出力とする深層強化学習モデルによって、前記ワークの重心点に対してズレ量が最小となる前記ワークの把持点を学習する強化学習部と、
前記深層強化学習モデルによって学習した前記ワークの把持点で前記ワークを拾い上げるように、前記ロボットアームの関節情報を導き出す経路生成部と、
前記導き出したロボットアームの関節情報に基づいて前記ロボットアームを制御する制御部と、
を備え、
前記強化学習部は、前記深層強化学習モデルによって、前記導き出したロボットアームの関節情報に基づいて前記ロボットアームを制御して前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点と前記ワークの把持点とのズレ量と、前記導き出したロボットアームの関節情報と、を用いて、前記ワークの把持点を再学習する。
【0007】
上述の制御装置は、前記ロボットアームで拾い上げるワークの種類並びに拾い上げるワークの順番に関する情報、及び学習済みワークの種類に関する情報を取得し、前記ロボットアームで拾い上げるワークの種類並びに拾い上げるワークの順番に関する情報、及び学習済みワークの種類に関する情報に基づいて、今回、拾い上げるワークが学習済みか否かを判定する判定部を備え、
前記今回、拾い上げるワークが学習済みの場合、前記深層強化学習モデルによる学習を省略し、前記今回、拾い上げるワークが学習済みでない場合、前記深層強化学習モデルによる学習を行うことが好ましい。
【0008】
上述の制御装置において、前記ロボットアームの関節情報として前記ロボットアームの各関節部の角度情報の他に、前記ロボットアームの関節部を駆動するモータの角速度情報、角加速度情報又はトルク情報の少なくとも何れか1つを含むことが好ましい。
【0009】
本開示の一態様に係る制御方法は、ワークを拾い上げて移動させるロボットアームの制御方法であって、
前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点を前記ロボットアームに設けられた力覚センサの検出情報に基づいて導き出す工程と、
前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点と前記ワークの把持点とのズレ量と、前記ロボットアームで前記ワークを拾い上げた際の前記ロボットアームの関節情報と、を入力とし、前記ワークの把持点を出力とする深層強化学習モデルによって、前記ワークの重心点に対してズレ量が最小となる前記ワークの把持点を学習する工程と、
前記深層強化学習モデルによって学習した前記ワークの把持点で前記ワークを拾い上げるように、前記ロボットアームの関節情報を導き出す工程と、
前記導き出したロボットアームの関節情報に基づいて前記ロボットアームを制御する工程と、
前記深層強化学習モデルによって、前記導き出したロボットアームの関節情報に基づいて前記ロボットアームを制御して前記ロボットアームで前記ワークを拾い上げた際の前記ワークの重心点と前記ワークの把持点とのズレ量と、前記導き出したロボットアームの関節情報と、を用いて、前記ワークの把持点を再学習する工程と、
を備える。
【0010】
上述の制御方法は、前記ロボットアームで拾い上げるワークの種類並びに拾い上げるワークの順番に関する情報、及び学習済みワークの種類に関する情報を取得し、前記ロボットアームで拾い上げるワークの種類並びに拾い上げるワークの順番に関する情報、及び学習済みワークの種類に関する情報に基づいて、今回、拾い上げるワークが学習済みか否かを判定する工程を備え、
前記今回、拾い上げるワークが学習済みの場合、前記深層強化学習モデルによる学習を省略し、前記今回、拾い上げるワークが学習済みでない場合、前記深層強化学習モデルによる学習を行うことが好ましい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
ロータ
今日
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
サーバ
7日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
ロータ
今日
トヨタ自動車株式会社
リレー
今日
トヨタ自動車株式会社
燃焼器
2日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
内燃機関
7日前
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
充電施設
今日
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
収容ケース
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
異物除去装置
2日前
トヨタ自動車株式会社
点検支援装置
今日
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
自動運転車両
今日
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ