TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025022140
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023126428
出願日
2023-08-02
発明の名称
電動工具
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
B25F
5/02 20060101AFI20250206BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ケーシング内のグリスが外部に漏れることを抑制できる電動工具を提供する。
【解決手段】電動工具は、モータと、モータにより駆動される遊星歯車と、遊星歯車と噛み合う内歯歯車と、遊星歯車及び内歯歯車を収容するケーシングと、ケーシングのうち内歯歯車の中心軸の軸方向に対する側方の一方側及び他方側にそれぞれ設けられる貫通孔と、それぞれの貫通孔に挿入され、内歯歯車を軸方向に移動可能なリンクと、貫通孔とリンクの間の隙間を覆うカバー部材とを有する。
【選択図】図8
特許請求の範囲
【請求項1】
モータと、
前記モータにより駆動される遊星歯車と、
前記遊星歯車と噛み合う内歯歯車と、
前記遊星歯車及び前記内歯歯車を収容するケーシングと、
前記ケーシングのうち前記内歯歯車の中心軸の軸方向に対する側方の一方側及び他方側にそれぞれ設けられる貫通孔と、
それぞれの前記貫通孔に挿入され、前記内歯歯車を前記軸方向に移動可能なリンクと、
前記貫通孔と前記リンクの間の隙間を覆うカバー部材と
を有する電動工具。
続きを表示(約 700 文字)
【請求項2】
前記カバー部材は、前記リンクの移動に連動して移動可能に設けられる
請求項1に記載の電動工具。
【請求項3】
前記カバー部材は、前記リンクの移動に連動して移動する移動範囲の全体に亘って前記隙間を覆った状態を維持するように形成される
請求項2に記載の電動工具。
【請求項4】
前記カバー部材は、移動方向の少なくとも一方の端部が先細りの形状を有する
請求項2又は請求項3に記載の電動工具。
【請求項5】
前記カバー部材は、前記軸方向に移動可能である
請求項2から請求項4のいずれか一項に記載の電動工具。
【請求項6】
前記カバー部材は、前記ケーシングの表面に沿って前記軸方向に交差する方向に移動可能である
請求項2から請求項4のいずれか一項に記載の電動工具。
【請求項7】
前記カバー部材は、前記軸方向に対して傾いた方向に延びるカバー側貫通孔を有する
請求項6に記載の電動工具。
【請求項8】
前記ケーシングは、前記カバー部材を案内する案内部を有する
請求項2から請求項7のいずれか一項に記載の電動工具。
【請求項9】
前記案内部は、前記カバー部材の移動方向の両側方に配置される
請求項8に記載の電動工具。
【請求項10】
前記ケーシングは、前記カバー部材が前記案内部から脱落することを抑制する脱落抑制部を有する
請求項8又は請求項9に記載の電動工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、電動工具に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
電動工具に係る技術分野において、特許文献1に開示されているような、遊星歯車の速度モードを高速モードと低速モードとに切り換えることができるドライバドリルが知られている。このようなドライバドリルでは、速度切り替えレバーを移動させることで、速度モードを切り替えることができる。
【先行技術文献】
【特許文献】
【0003】
中国特許出願公開第102049549号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のドライバドリルでは、遊星歯車がケーシングに収容される。速度切り替えレバーには、切り替えワイヤが接続される。切り替えワイヤは、ケーシングの外側から内側に挿入されて遊星歯車に接続される。ケーシングには、切り替えワイヤを挿入するための挿入穴が設けられる。切り替えワイヤを移動させるため、挿入穴は切り替えワイヤの移動方向に沿って形成される。このような構成において、ケーシング内のグリスが外部に漏れることを抑制することが求められる。
【課題を解決するための手段】
【0005】
本明細書は、電動工具を開示する。電動工具は、モータと、モータにより駆動される遊星歯車と、遊星歯車と噛み合う内歯歯車と、遊星歯車及び内歯歯車を収容するケーシングと、ケーシングのうち内歯歯車の中心軸の軸方向に対する側方の一方側及び他方側にそれぞれ設けられる貫通孔と、それぞれの貫通孔に挿入され、内歯歯車を軸方向に移動可能なリンクと、貫通孔とリンクの間の隙間を覆うカバー部材とを有する。
【0006】
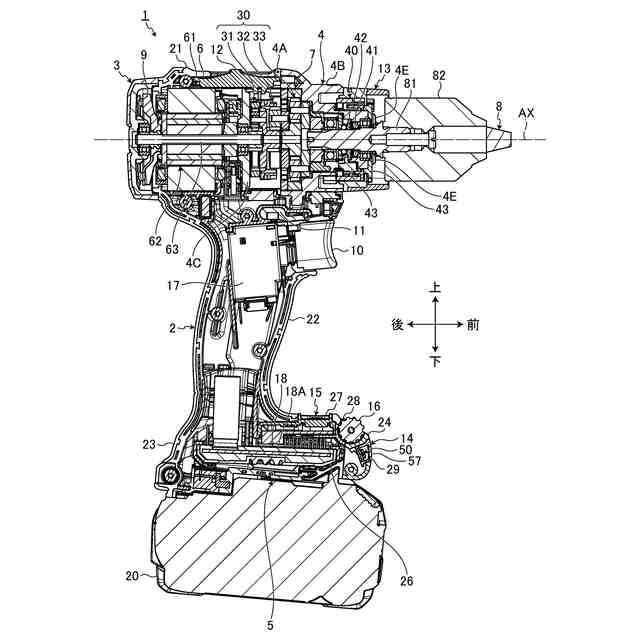
本明細書は、電動工具を開示する。電動工具は、モータと、モータの前方に配置され、モータにより駆動される遊星歯車と、遊星歯車と噛み合う内歯歯車と、遊星歯車及び内歯歯車を収容するケーシングと、遊星歯車の前方に配置され、遊星歯車により駆動される出力部と、ケーシングの右部に設けられ、前後方向に延びる右貫通溝と、ケーシングの左部に設けられ、前後方向に延びる左貫通溝と、右貫通溝に挿入され、内歯歯車を前後方向に移動可能な右リンクと、左貫通溝に挿入され、内歯歯車を前後方向に移動可能な左リンクと、右貫通溝及び右リンクの間の隙間を覆う右カバー部材と、左貫通溝及び左リンクの間の隙間を覆う左カバー部材と、を有する。
【発明の効果】
【0007】
本明細書で開示する技術によれば、ケーシング内のグリスが外部に漏れることを抑制できる電動工具が提供される。
【図面の簡単な説明】
【0008】
図1は、実施形態に係るドライバドリルを示す前方からの斜視図である。
図2は、実施形態に係るドライバドリルを示す側面図である。
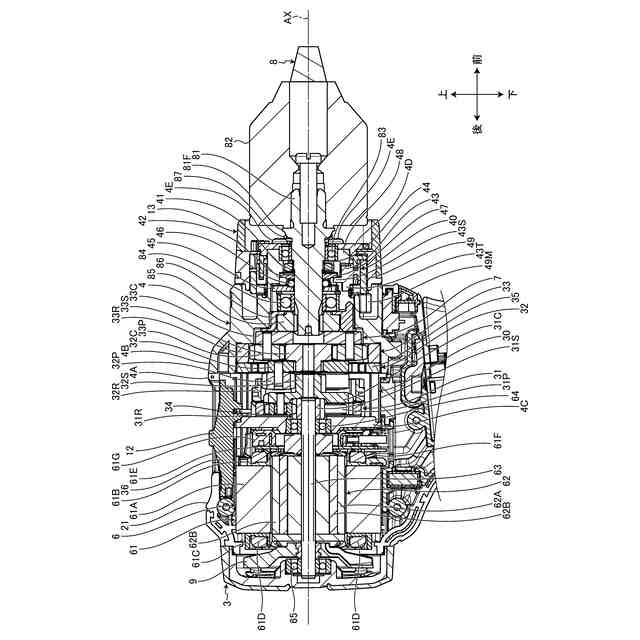
図3は、実施形態に係るドライバドリルを示す断面図である。
図4は、実施形態に係るドライバドリルの上部を示す断面図である。
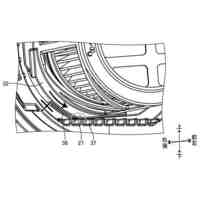
図5は、実施形態に係るケーシング及びリンクを示す斜視図である。
図6は、実施形態に係るケーシング及びリンクを示す分解斜視図である。
図7は、実施形態に係るケーシング及びリンクを示す側面図である。
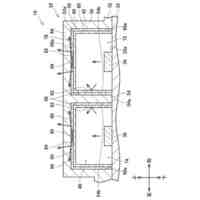
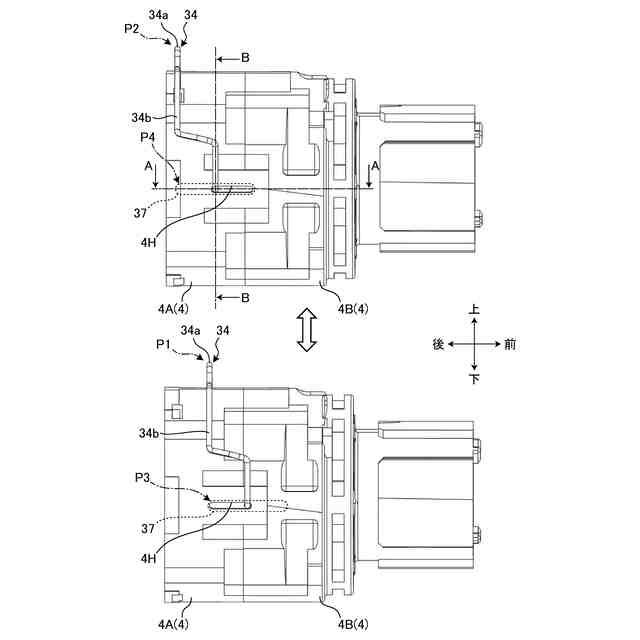
図8は、実施形態に係るケーシング及びリンクを示す断面図である。
図9は、実施形態に係る第1ケーシング及びリンクを示す斜視図である。
図10は、実施形態に係る第1ケーシング及びリンクを示す断面図である。
図11は、実施形態に係るケーシング及びリンクを示す斜視図である。
図12は、実施形態に係るケーシング及びリンクを示す分解斜視図である。
図13は、実施形態に係るケーシング及びリンクを示す側面図である。
図14は、実施形態に係るケーシング及びリンクを示す断面図である。
図15は、実施形態に係る第1ケーシング及びリンクを示す断面図である。
図16は、実施形態に係るケーシング及びリンクを示す斜視図である。
図17は、実施形態に係るケーシング及びリンクを示す分解斜視図である。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施形態において、電動工具は、モータと、モータにより駆動される遊星歯車と、遊星歯車と噛み合う内歯歯車と、遊星歯車及び内歯歯車を収容するケーシングと、ケーシングのうち内歯歯車の中心軸の軸方向に対する側方の一方側及び他方側にそれぞれ設けられる貫通孔と、それぞれの貫通孔に挿入され、内歯歯車を軸方向に移動可能なリンクと、貫通孔とリンクの間の隙間を覆うカバー部材とを有してもよい。
【0010】
上記の構成では、ケーシングの貫通孔とリンクと間の隙間がカバー部材で覆われる。これにより、ケーシング内のグリスが外部に漏れることを抑制できる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
8日前
株式会社マキタ
クリーナ
4日前
株式会社マキタ
表示装置
8日前
株式会社マキタ
作業機システムおよび作業機
11日前
株式会社マキタ
レシプロソー用のブレード及びレシプロソー
9日前
個人
腰袋
1か月前
株式会社アイセイ
搬送装置
23日前
川崎重工業株式会社
ハンド
17日前
国立大学法人金沢大学
ロボット
29日前
個人
けがき用治具
11日前
株式会社不二越
ロボット
9日前
株式会社マキタ
電動工具
1か月前
個人
深孔スリーブ駆動ロッド構造
1日前
株式会社不二越
ロボット操作装置
8日前
日本車輌製造株式会社
締め付け工具
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボットリスト
1か月前
川崎重工業株式会社
ロボット
9日前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
日本信号株式会社
作業機制御システム
1か月前
川崎重工業株式会社
ロボットシステム
17日前
株式会社黒澤鉄工製作所
けがき用治具
11日前
株式会社デンソー
操縦桿
9日前
個人
バール
1日前
株式会社京阪エンジニアリング
脱着装置
1か月前
梅馨堂合同会社
人協働ロボットシステム
3日前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
株式会社マキタ
集塵アタッチメント
1か月前
ARMA株式会社
UI付エンドエフェクタ
4日前
株式会社不二越
基板搬送用ロボット
18日前
アピュアン株式会社
衝撃工具
24日前
株式会社スター精機
ワーク搬送装置
1か月前
株式会社コスメック
把持装置
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ