TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025040824
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2023147868
出願日
2023-09-12
発明の名称
作業機システムおよび作業機
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
B25F
5/00 20060101AFI20250317BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業機の使い勝手を向上させることが可能な技術を提供する。
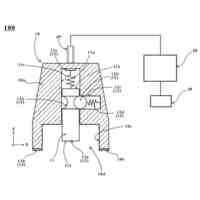
【解決手段】作業機システムは、作業部と電動モータと操作部と電源接続部と制御部を含む作業機と、ケース部と取付部を含む作業機ホルダと、作業機が作業機ホルダに保持されているか否かを検出する検出機構と、を備える。作業機は、第1状態と、第1状態に切り替えるために操作部への所定の切替操作を要する第2状態と、の間で切り替え可能である。制御部は、所定条件が成立する場合に作業機を第1状態から第2状態に切り替える第2状態移行処理を実行可能に構成されている。作業機が作業機ホルダに保持されていないことが検出機構で検出される場合、所定条件は、作業機の放置時間が第1所定時間以上となることを含む。作業機が作業機ホルダに保持されていることが検出機構で検出される場合、所定条件は、作業機の放置時間が第1所定時間よりも長い第2所定時間以上となることを含む。
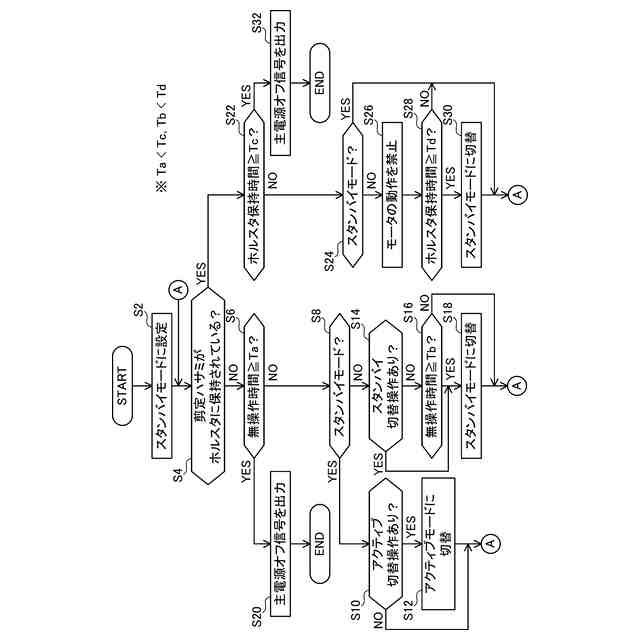
【選択図】図9
特許請求の範囲
【請求項1】
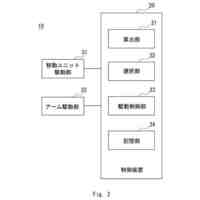
作業動作を行う作業部と、前記作業部を駆動する電動モータと、ユーザが操作可能な操作部と、電源に接続される電源接続部と、制御部と、を含む作業機と、
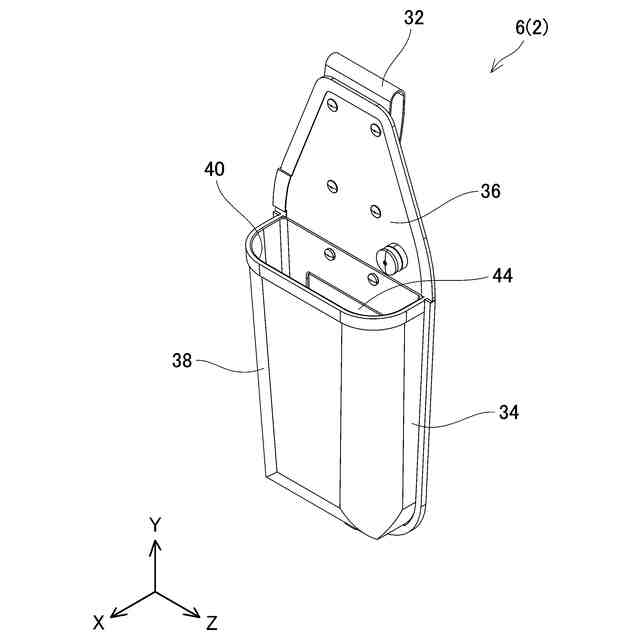
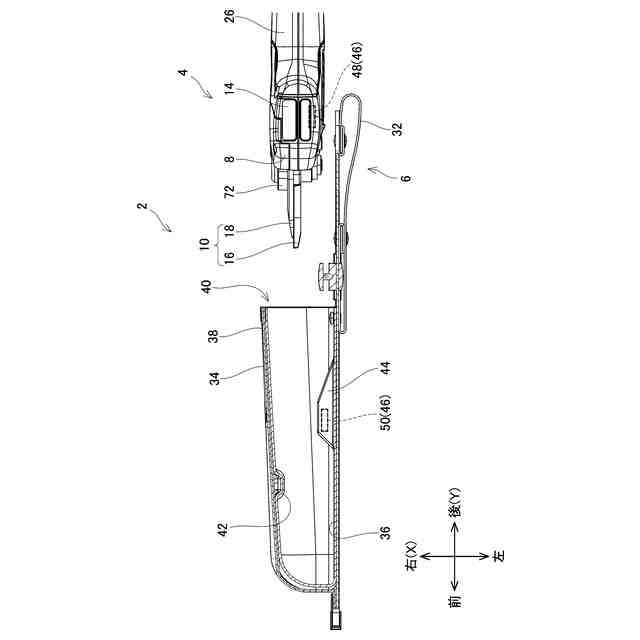
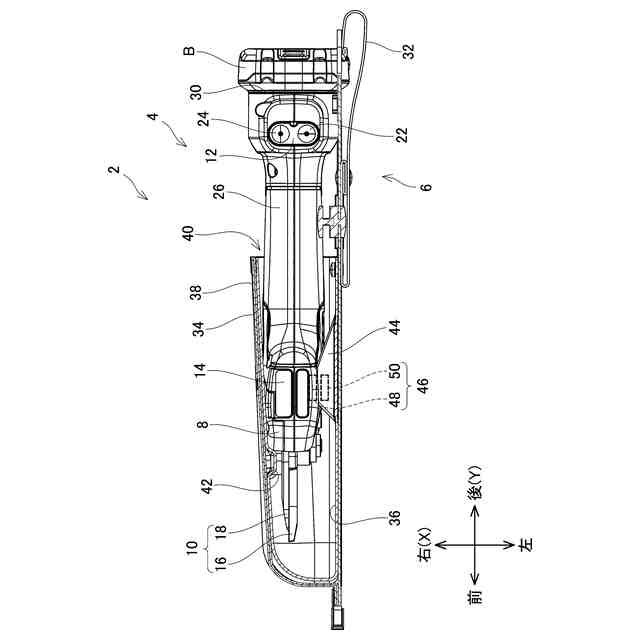
少なくとも前記作業部を収容可能なケース部と、ユーザに着脱可能に取り付けられる取付部と、を含む作業機ホルダと、
前記作業機が前記作業機ホルダに保持されているか否かを検出する検出機構と、を備えており、
前記作業機は、前記作業動作が許容される第1状態と、前記作業動作が禁止され、前記第1状態に切り替えるために前記操作部への所定の切替操作を要する第2状態と、の間で切り替え可能であり、
前記制御部は、所定条件が成立する場合に前記作業機を前記第1状態から前記第2状態に切り替える第2状態移行処理を実行可能に構成されており、
前記作業機が前記作業機ホルダに保持されていないことが前記検出機構で検出される場合、前記所定条件は、前記作業機の放置時間が第1所定時間以上となることを含み、
前記作業機が前記作業機ホルダに保持されていることが前記検出機構で検出される場合、前記所定条件は、前記作業機の前記放置時間が前記第1所定時間よりも長い第2所定時間以上となることを含む、作業機システム。
続きを表示(約 2,300 文字)
【請求項2】
作業動作を行う作業部と、前記作業部を駆動する電動モータと、ユーザが操作可能な操作部と、電源に接続される電源接続部と、制御部と、を含む作業機と、
少なくとも前記作業部を収容可能なケース部と、ユーザに着脱可能に取り付けられる取付部と、を含む作業機ホルダと、
前記作業機が前記作業機ホルダに保持されているか否かを検出する検出機構と、を備えており、
前記作業機は、前記作業動作が許容される第1状態と、前記作業動作が禁止され、前記第1状態に切り替えるために前記操作部への所定の切替操作を要する第2状態と、の間で切り替え可能であり、
前記制御部は、前記作業機を前記第1状態から前記第2状態に切り替える第2状態移行処理を実行可能に構成されており、
前記制御部は、
前記作業機が前記作業機ホルダに保持されていないことが前記検出機構で検出される場合、所定条件が成立すると、前記第2状態移行処理を実行し、
前記作業機が前記作業機ホルダに保持されていることが前記検出機構で検出される場合、前記所定条件が成立しても、前記第2状態移行処理を実行しない、作業機システム。
【請求項3】
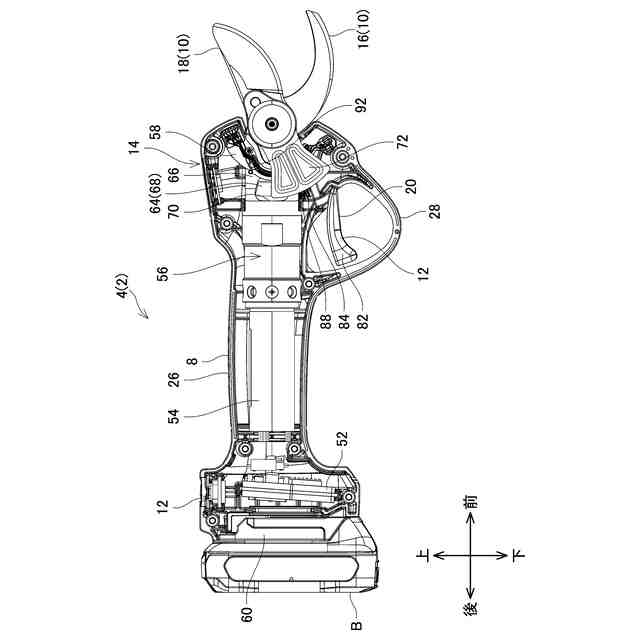
前記操作部は、前記作業部に前記作業動作を行なわせるためのトリガ操作部を備えており、
前記第1状態は、前記トリガ操作部に操作がなされる場合に前記制御部が前記電動モータを動作させて前記作業部に前記作業動作を行なわせるアクティブ状態であり、
前記第2状態は、前記トリガ操作部に操作がなされても前記制御部が前記作業部に前記作業動作を行なわせないスタンバイ状態であり、
前記切替操作は、前記トリガ操作部へのアクティブ切替操作を含み、
前記第2状態移行処理は、前記作業機を前記アクティブ状態から前記スタンバイ状態に切り替えるスタンバイ状態移行処理である、請求項1または2の作業機システム。
【請求項4】
前記操作部は、電源スイッチを備えており、
前記第1状態は、前記電源から前記制御部への電力供給が行われる電源オン状態であり、
前記第2状態は、前記電源から前記制御部への電力供給が行われない電源オフ状態であり、
前記切替操作は、前記電源スイッチへの操作を含み、
前記第2状態移行処理は、前記作業機を前記電源オン状態から前記電源オフ状態に切り替える電源オフ状態移行処理である、請求項1または2の作業機システム。
【請求項5】
前記作業機は、前記電源と前記電動モータの間を選択的に接続および遮断するスイッチ回路を備えており、
前記スイッチ回路は、前記作業機が前記作業機ホルダに保持されていないことが前記検出機構で検出される場合、前記電源と前記電動モータの間を電気的に接続し、前記作業機が前記作業機ホルダに保持されていることが前記検出機構で検出される場合、前記電源と前記電動モータの間を電気的に遮断する、請求項1から4の何れか一項の作業機システム。
【請求項6】
前記スイッチ回路は、前記制御部とは独立して動作する、請求項5の作業機システム。
【請求項7】
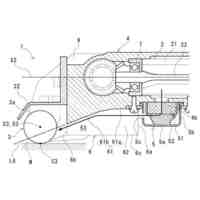
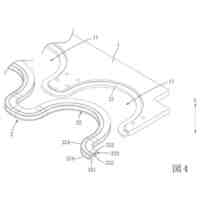
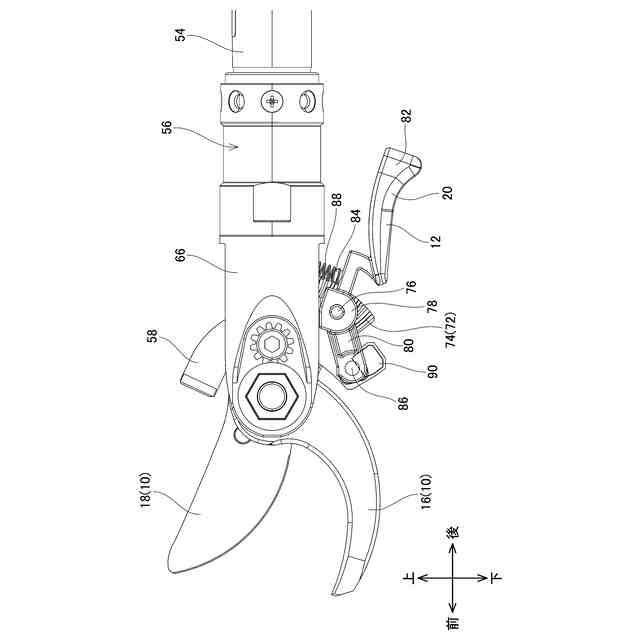
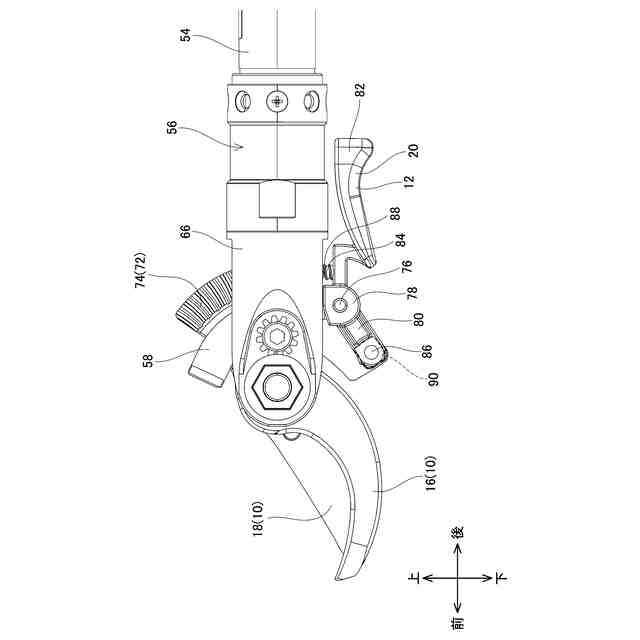
前記作業部は、第1刃と、前記第1刃に対して開位置と閉位置の間で移動可能な第2刃と、を備えており、
前記作業動作は、前記第2刃を前記開位置から前記閉位置に移動させる動作である、請求項1から6の何れか一項の作業機システム。
【請求項8】
前記検出機構は、
前記作業機および前記作業機ホルダの一方に設けられた磁気センサと、
前記作業機および前記作業機ホルダの他方に設けられた磁石と、を備える、請求項1から7の何れか一項の作業機システム。
【請求項9】
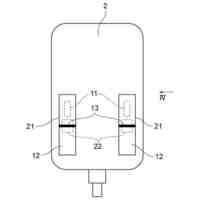
前記作業機ホルダは、前記ケース部の内面から突出しており、前記作業機に当接する突起部をさらに含んでおり、
前記検出機構は、
検出部と、
前記検出部によって検出される被検出部と、を備えており、
前記検出部および前記被検出部の一方は、前記作業機に設けられており、
前記検出部および前記被検出部の他方は、前記作業機ホルダの前記突起部に設けられる、請求項1から8の何れか一項の作業機システム。
【請求項10】
作業機ホルダに保持させることが可能な作業機であって、
作業動作を行う作業部と、
前記作業部を駆動する電動モータと、
ユーザが操作可能な操作部と、
電源に接続される電源接続部と、
前記作業機が前記作業機ホルダに保持されているか否かを検出する検出部と、
制御部と、を備えており、
前記作業機は、前記作業動作が許容される第1状態と、前記作業動作が禁止され、前記第1状態に切り替えるために前記操作部への所定の切替操作を要する第2状態と、の間で切り替え可能であり、
前記制御部は、所定条件が成立する場合に前記作業機を前記第1状態から前記第2状態に切り替える第2状態移行処理を実行可能に構成されており、
前記作業機が前記作業機ホルダに保持されていないことが前記検出部で検出される場合、前記所定条件は、前記作業機の放置時間が第1所定時間以上となることを含み、
前記作業機が前記作業機ホルダに保持されていることが前記検出部で検出される場合、前記所定条件は、前記作業機の前記放置時間が前記第1所定時間よりも長い第2所定時間以上となることを含む、作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、作業機システムおよび作業機に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1には、作業動作を行う作業部と、前記作業部を駆動する電動モータと、ユーザが操作可能な操作部と、電源に接続される電源接続部と、制御部と、を含む作業機と、少なくとも前記作業部を収容可能なケース部と、ユーザに着脱可能に取り付けられる取付部と、を含む作業機ホルダと、を備える作業機システムが開示される。前記作業機は、前記作業動作が許容される第1状態と、前記作業動作が禁止され、前記第1状態に切り替えるために前記操作部への所定の切替操作を要する第2状態と、の間で切り替え可能である。
【先行技術文献】
【特許文献】
【0003】
特開2008-067630号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業機を、第1状態で放置される状況が続く場合に、第1状態から第2状態に自動的に切り替わるように構成することがある。ただし、作業機が作業機ホルダに保持された状態で放置される場合には、その後にユーザが再び作業機を使用することが見込まれる。このため、作業機が作業機ホルダに保持されている間に作業機が自動的に(ユーザの意思とは無関係に)第2状態に切り替わると、ユーザに煩わしさを感じさせる場合がある。例えば、ユーザが作業機を第1状態で使用したい場合には、作業機を第2状態から第1状態に切り替えるための切替操作が必要となるので、ユーザに煩わしさを感じさせることになる。その結果、作業機の使い勝手が悪くなるおそれがある。本明細書では、作業機の使い勝手を向上させることが可能な技術を提供する。
【課題を解決するための手段】
【0005】
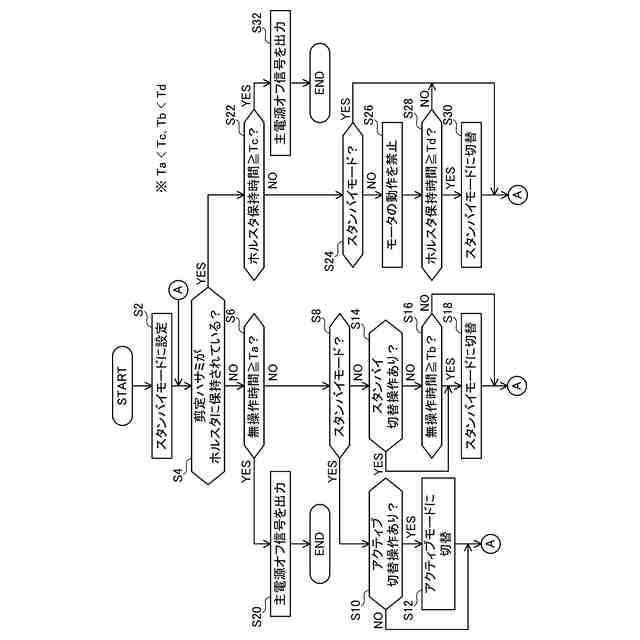
本明細書が開示する作業機システムは、作業動作を行う作業部と、前記作業部を駆動する電動モータと、ユーザが操作可能な操作部と、電源に接続される電源接続部と、制御部と、を含む作業機と、少なくとも前記作業部を収容可能なケース部と、ユーザに着脱可能に取り付けられる取付部と、を含む作業機ホルダと、前記作業機が前記作業機ホルダに保持されているか否かを検出する検出機構と、を備える。前記作業機は、前記作業動作が許容される第1状態と、前記作業動作が禁止され、前記第1状態に切り替えるために前記操作部への所定の切替操作を要する第2状態と、の間で切り替え可能である。前記制御部は、所定条件が成立する場合に前記作業機を前記第1状態から前記第2状態に切り替える第2状態移行処理を実行可能に構成されている。前記作業機が前記作業機ホルダに保持されていないことが前記検出機構で検出される場合、前記所定条件は、前記作業機の放置時間が第1所定時間以上となることを含む。前記作業機が前記作業機ホルダに保持されていることが前記検出機構で検出される場合、前記所定条件は、前記作業機の前記放置時間が前記第1所定時間よりも長い第2所定時間以上となることを含む。
【0006】
上記の構成では、作業機が第1状態で放置される場合、制御部が実行する第2状態移行処理によって、作業機が第1状態から第2状態に自動的に切り替わる。ただし、上記の構成によれば、作業機が作業機ホルダに保持されている間は、作業機が作業機ホルダに保持されていない間と比較して、第2状態移行処理のトリガとなる条件が成立しにくくなっている。このため、作業機が作業機ホルダに保持されている間は、作業機が第1状態から第2状態に自動的に切り替わることが抑制される。これにより、ユーザに煩わしさを感じさせることを抑制できるので、作業機の使い勝手を向上させることができる。
【0007】
本明細書が開示する別の作業機システムは、作業動作を行う作業部と、前記作業部を駆動する電動モータと、ユーザが操作可能な操作部と、電源に接続される電源接続部と、制御部と、を含む作業機と、少なくとも前記作業部を収容可能なケース部と、ユーザに着脱可能に取り付けられる取付部と、を含む作業機ホルダと、前記作業機が前記作業機ホルダに保持されているか否かを検出する検出機構と、を備える。前記作業機は、前記作業動作が許容される第1状態と、前記作業動作が禁止され、前記第1状態に切り替えるために前記操作部への所定の切替操作を要する第2状態と、の間で切り替え可能である。前記制御部は、前記作業機を前記第1状態から前記第2状態に切り替える第2状態移行処理を実行可能に構成されている。前記制御部は、前記作業機が前記作業機ホルダに保持されていないことが前記検出機構で検出される場合、所定条件が成立すると、前記第2状態移行処理を実行する。前記制御部は、前記作業機が前記作業機ホルダに保持されていることが前記検出機構で検出される場合、前記所定条件が成立しても、前記第2状態移行処理を実行しない。
【0008】
上記の構成では、作業機が第1状態で放置される場合、制御部が実行する第2状態移行処理によって、作業機が第1状態から第2状態に自動的に切り替わる。ただし、上記の構成によれば、作業機が作業機ホルダに保持されている間は、作業機が作業機ホルダに保持されていない間と比較して、第2状態移行処理が実行されにくくなる。このため、作業機が作業機ホルダに保持されている間は、作業機が第1状態から第2状態に自動的に切り替わることが抑制される。これにより、ユーザに煩わしさを感じさせることを抑制できるので、作業機の使い勝手を向上させることができる。
【0009】
本明細書が開示する作業機は、作業機ホルダに保持させることが可能となっている。前記作業機は、作業動作を行う作業部と、前記作業部を駆動する電動モータと、ユーザが操作可能な操作部と、電源に接続される電源接続部と、前記作業機が前記作業機ホルダに保持されているか否かを検出する検出部と、制御部と、を備える。前記作業機は、前記作業動作が許容される第1状態と、前記作業動作が禁止され、前記第1状態に切り替えるために前記操作部への所定の切替操作を要する第2状態と、の間で切り替え可能である。前記制御部は、所定条件が成立する場合に前記作業機を前記第1状態から前記第2状態に切り替える第2状態移行処理を実行可能に構成されている。前記作業機が前記作業機ホルダに保持されていないことが前記検出部で検出される場合、前記所定条件は、前記作業機の放置時間が第1所定時間以上となることを含む。前記作業機が前記作業機ホルダに保持されていることが前記検出部で検出される場合、前記所定条件は、前記作業機の前記放置時間が前記第1所定時間よりも長い第2所定時間以上となることを含む。
【0010】
上記の構成では、作業機が第1状態で放置される場合、制御部が実行する第2状態移行処理によって、作業機が第1状態から第2状態に自動的に切り替わる。ただし、上記の構成によれば、作業機が作業機ホルダに保持されている間は、作業機が作業機ホルダに保持されていない間と比較して、第2状態移行処理のトリガとなる条件が成立しにくくなっている。このため、作業機が作業機ホルダに保持されている間は、作業機が第1状態から第2状態に自動的に切り替わることが抑制される。これにより、ユーザに煩わしさを感じさせることを抑制できるので、作業機の使い勝手を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
17日前
株式会社アイセイ
搬送装置
23日前
個人
けがき用治具
11日前
株式会社不二越
ロボット
9日前
個人
深孔スリーブ駆動ロッド構造
1日前
株式会社不二越
ロボット操作装置
8日前
川崎重工業株式会社
ロボット
9日前
個人
バール
1日前
川崎重工業株式会社
ロボットシステム
17日前
株式会社黒澤鉄工製作所
けがき用治具
11日前
株式会社デンソー
操縦桿
9日前
梅馨堂合同会社
人協働ロボットシステム
3日前
株式会社不二越
基板搬送用ロボット
18日前
ARMA株式会社
UI付エンドエフェクタ
4日前
若井ホールディングス株式会社
レンチ構造とその製造方法
11日前
株式会社マキタ
作業機
8日前
株式会社マキタ
電動工具
23日前
三菱電機株式会社
トルク締め個所検出システム
1日前
高丸工業株式会社
ロボット操作システムの動作方法
1日前
シブヤパッケージングシステム株式会社
物品移載装置
9日前
株式会社デンソー
解体装置および解体プログラム
9日前
株式会社デンソー
作業装置および作業プログラム
9日前
株式会社ベッセル工業
インパクト工具
9日前
株式会社不二越
通信端末装置及びロボット制御システム
22日前
不二空機株式会社
エアツール及びエアツールの使用方法
17日前
JUKI株式会社
ハンドリング装置
3日前
学校法人 名古屋電気学園
制御システム
15日前
株式会社バイナス
ロボット可搬装置を有する自律走行搬送システム
15日前
株式会社SUBARU
ボルトの電動締結工具
4日前
マックス株式会社
ステープル取り外し装置
23日前
マックス株式会社
ステープル取り外し装置
23日前
住友林業株式会社
ビスなどの打ち込み装置用スタンド
17日前
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
23日前
川崎重工業株式会社
ロボットシステム、および、画像処理方法
23日前
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
23日前
元烽企業有限公司
炉芯管保持装置
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ