TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018821
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122843
出願日
2023-07-27
発明の名称
ロボットアーム
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
19/00 20060101AFI20250130BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
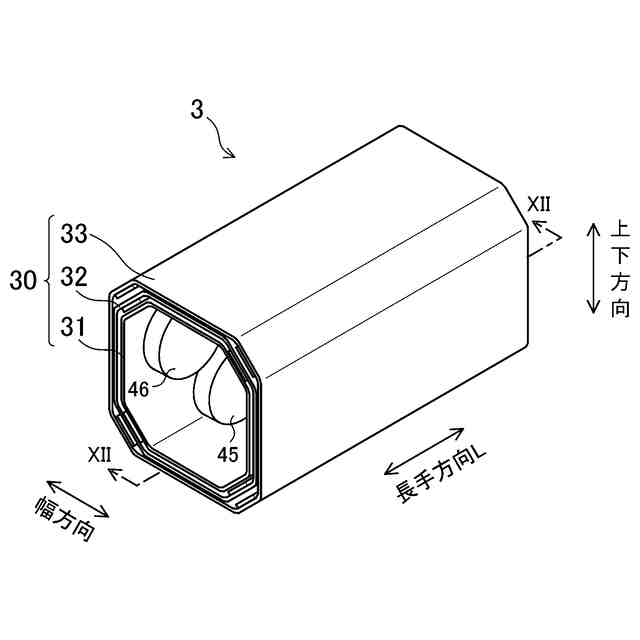
【課題】コンパクトにケーブルを収容しつつ、アームハウジングの伸縮時におけるケーブルの縺れ及び破損の発生を抑制する。
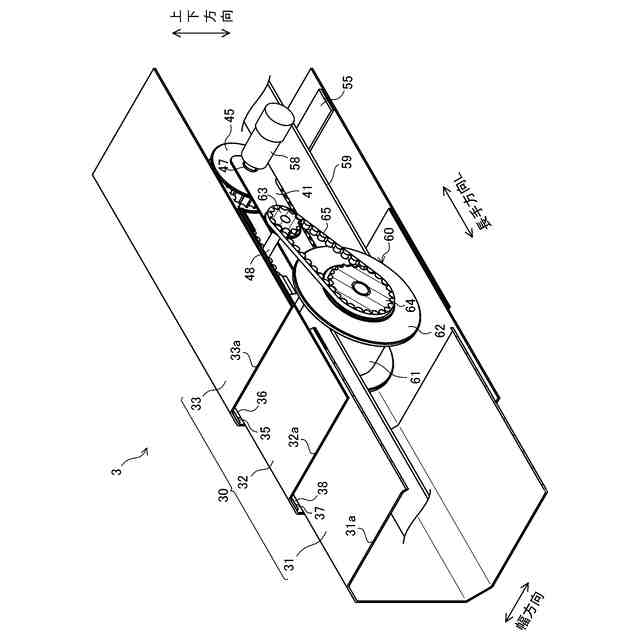
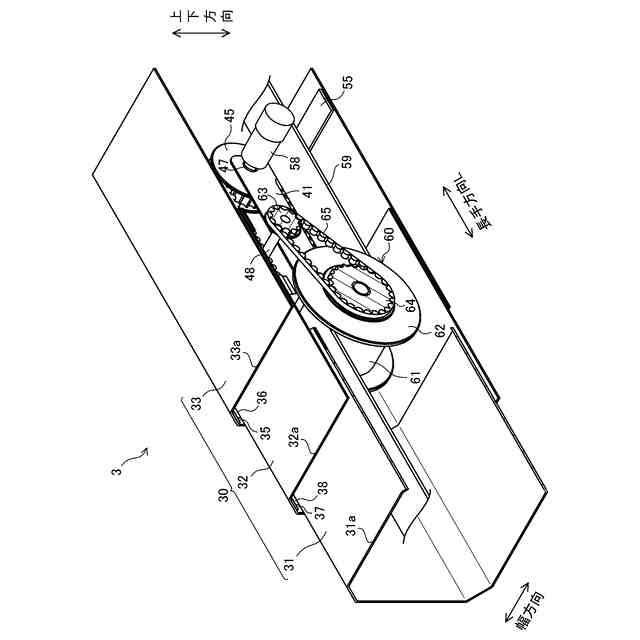
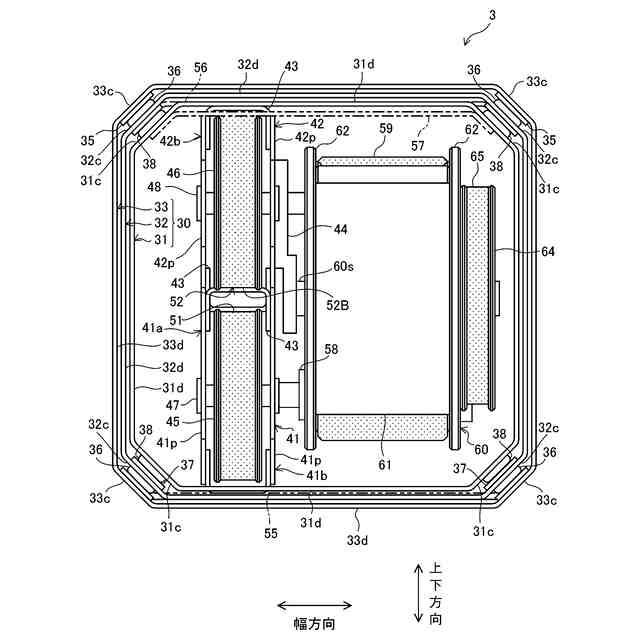
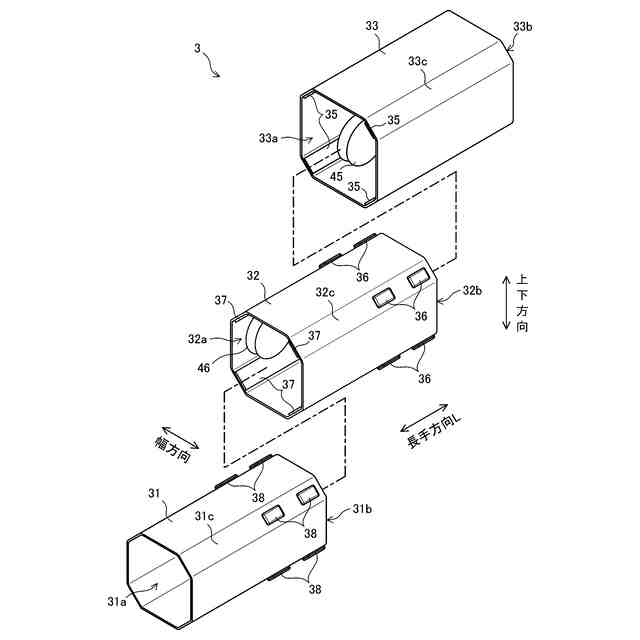
【解決手段】ロボットアーム3は、所定の長手方向Lに伸縮するアームハウジング30と、アームハウジング30を伸縮させる駆動力を発生するモータ58と、アームハウジング30内に収容されるケーブル59と、アームハウジング30内に配置され、ケーブル59を巻き取るリール60とを備え、リール60は、モータ58の駆動力によって駆動され、アームハウジング30の伸縮と連動してケーブル59の繰り出し及び巻き取りを行う。
【選択図】図5
特許請求の範囲
【請求項1】
所定の長手方向に伸縮するアームハウジングと、
前記アームハウジングを伸縮させる駆動力を発生する駆動器と、
前記アームハウジング内に収容されるケーブルと、
前記アームハウジング内に配置され、前記ケーブルを巻き取るリールとを備え、
前記リールは、前記駆動器の駆動力によって駆動され、前記アームハウジングの伸縮と連動して前記ケーブルの繰り出し及び巻き取りを行うロボットアーム。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載のロボットアームにおいて、
前記アームハウジングは、前記長手方向に延びる筒状である先端アームハウジングと、前記長手方向に延びる筒状であって、前記リールを保持して、前記長手方向へ進退自在に前記先端アームハウジングを組み込む保持アームハウジングとを有し、
前記ケーブルは、前記リールから前記先端アームハウジングへ延びる部分を含み、
前記リールは、前記先端アームハウジングが前記保持アームハウジングに対して進出するときに前記ケーブルを繰り出し、且つ、前記先端アームハウジングが前記保持アームハウジングに対して後退するときに前記ケーブルを巻き取るロボットアーム。
【請求項3】
請求項2に記載のロボットアームにおいて、
前記リールによる前記ケーブルの繰り出し量及び巻き取り量は、前記進出時又は前記後退時の前記長手方向への前記保持アームハウジングに対する前記先端アームハウジングの移動量であるストローク量に対応するロボットアーム。
【請求項4】
請求項1乃至3の何れか1つに記載のロボットアームにおいて、
前記駆動器から前記リールへ駆動力を伝達する伝達器をさらに備え、
前記伝達器は、タイミングプーリ及びタイミングベルトを有するロボットアーム。
【請求項5】
請求項1乃至3の何れか1つに記載のロボットアームにおいて、
前記アームハウジングは、前記長手方向に延びる筒状である先端アームハウジングと、前記長手方向に延びる筒状であって、前記リールを保持して、前記長手方向へ進退自在に前記先端アームハウジングを組み込む保持アームハウジングと、前記長手方向に延びる筒状であって、前記長手方向へ進退自在に前記保持アームハウジングを組み込む基端アームハウジングとを有し、
前記ケーブルは、前記リールから前記先端アームハウジングへ延びる第1部分と、前記リールから前記基端アームハウジングへ延びる第2部分とを含み、
前記リールは、前記保持アームハウジングが前記基端アームハウジングに対して進出し且つ前記先端アームハウジングが前記保持アームハウジングに対して進出するときに前記ケーブルの前記第1部分及び前記第2部分の両方を繰り出し、且つ、前記保持アームハウジングが前記基端アームハウジングに対して後退し且つ前記先端アームハウジングが前記保持アームハウジングに対して後退するときに前記ケーブルの前記第1部分及び前記第2部分の両方を巻き取るロボットアーム。
【請求項6】
請求項5に記載のロボットアームにおいて、
前記ケーブルの前記第1部分において、前記リールによる前記ケーブルの繰り出し量及び巻き取り量は、前記進出時又は前記後退時の前記長手方向への前記保持アームハウジングに対する前記先端アームハウジングの移動量である第1ストローク量に対応し、
前記ケーブルの前記第2部分において、前記リールによる前記ケーブルの繰り出し量及び巻き取り量は、前記進出時又は前記後退時の前記長手方向への前記基端アームハウジングに対する前記保持アームハウジングの移動量である第2ストローク量に対応するロボットアーム。
【請求項7】
請求項1乃至3の何れか1つに記載のロボットアームにおいて、
前記リールは、前記リールの回転軸に交差する面内で延びる溝と、前記リールの外周面に配置され、前記溝の両端となる2つの開口とを有し、
前記ケーブルは、前記溝において前記リールに固定され、且つ、前記2つの開口のそれぞれから前記リールの周方向の一側に引き出され、
前記溝の両端部のそれぞれは、前記リールの径方向の外側で且つ周方向の前記一側へ向かって湾曲しながら延びているロボットアーム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、ロボットアームに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
例えば、特許文献1には、伸縮動作を行うロボットアームが開示されている。ロボットアームは、伸縮するアームハウジングと、アームハウジング内に収容されたケーブルと、ケーブルの配線経路を延長するための経路延長部とを備えている。経路延長部は、ケーブルが引き回される複数のプーリを有する。このロボットアームでは、アームハウジングの伸縮に対応してケーブル自体が伸縮する。
【先行技術文献】
【特許文献】
【0003】
特開2016-78160号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
アームハウジング内にケーブルを収容する場合、アームハウジングの伸縮時にケーブルの縺れ及び破損が発生する虞がある。特許文献1に記載のロボットアームのように、経路延長部のような機構を設けると、ロボットアームが大型化する虞がある。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、コンパクトにケーブルを収容しつつ、アームハウジングの伸縮時におけるケーブルの縺れ及び破損の発生を抑制することにある。
【課題を解決するための手段】
【0006】
ここに開示されたロボットアームは、所定の長手方向に伸縮するアームハウジングと、アームハウジングを伸縮させる駆動力を発生する駆動器と、アームハウジング内に収容されるケーブルと、アームハウジング内に配置され、ケーブルを巻き取るリールとを備え、リールは、駆動器の駆動力によって駆動され、アームハウジングの伸縮と連動してケーブルの繰り出し及び巻き取りを行う。
【発明の効果】
【0007】
前記ロボットアームは、コンパクトにケーブルを収容しつつ、アームハウジングの伸縮時におけるケーブルの縺れ及び破損の発生を抑制できる。
【図面の簡単な説明】
【0008】
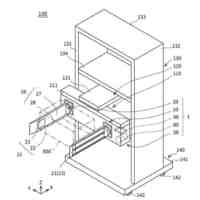
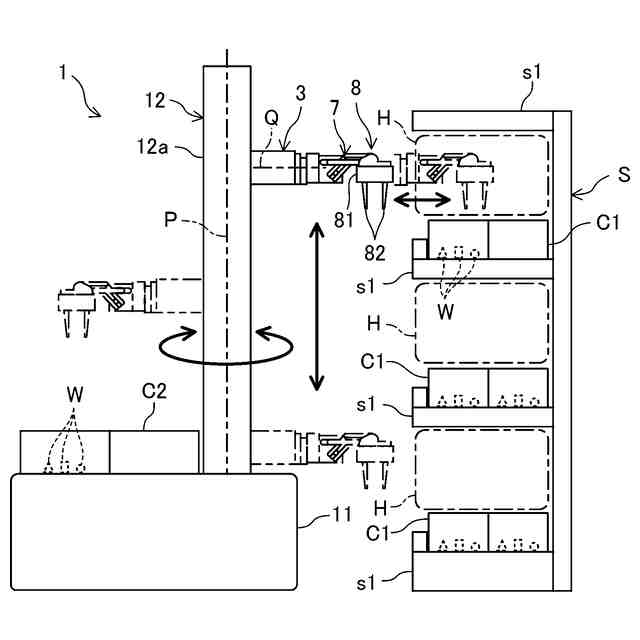
図1は、ロボットを示す模式図である。
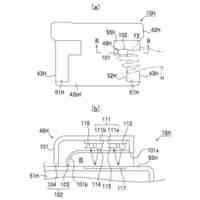
図2は、ピッキング作業の一例を示す模式図である。
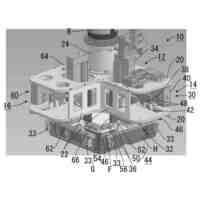
図3は、伸長状態のロボットアームの斜視図である。
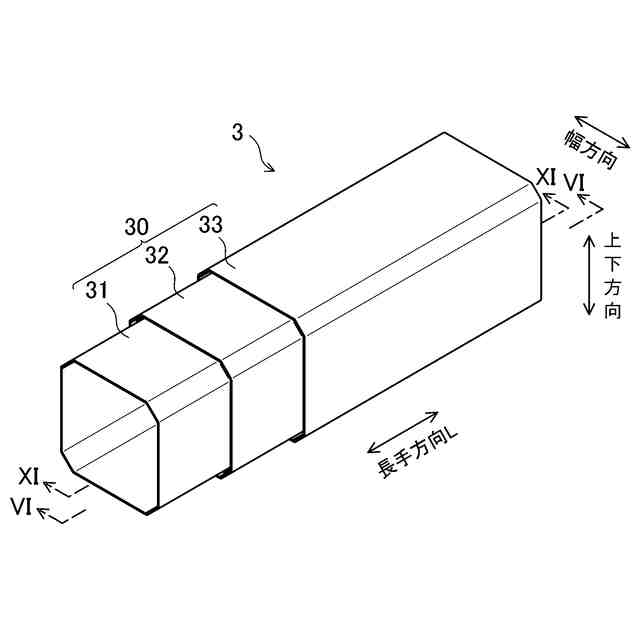
図4は、収縮状態のロボットアームの斜視図である。
図5は、ロボットアームの外壁の一部を切断した斜視図である。
図6は、図3のVI-VI線における断面図である。
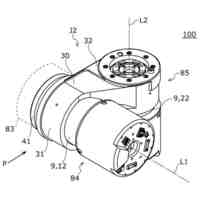
図7は、ロボットアームの正面図である。
図8は、ロボットアームの分解斜視図である。
図9は、第3アームハウジングと第1プーリホルダとの連結を説明するための正面図である。
図10は、第2アームハウジングと第2プーリホルダとの連結を説明するための正面図である。
図11は、図3のXI-XI線における断面図である。
図12は、図4のXII-XII線における断面図である。
図13は、図11のリール部分の拡大図である。
図14は、変形例に係るロボットアームの斜視図である。
図15は、図14のXV-XV線における断面図である。
図16は、変形例に係る、収縮状態のロボットアームの断面図である。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。図1は、ロボット1を示す模式図である。ロボット1は、ピッキング作業を行う。具体的には、ロボット1は、棚Sに載置された第1コンテナC1からワークWを取り出して、ワークWを第2コンテナC2へ移送する。第1コンテナC1は、ワークWを収容する移送元のコンテナである。第2コンテナC2は、ワークWを収容する移送先のコンテナである。
【0010】
棚Sは、上下方向に間隔を空けて配列された複数の棚板S1を有している。第1コンテナC1は、棚板S1の上に載置されている。棚Sにおいて、第1コンテナC1と第1コンテナC1の上方に位置する棚板S1との間には、ロボットアーム3が進入可能な作業スペースHが存在する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
23日前
株式会社クレスコ
補助吸着具
16日前
株式会社不二越
ロボット
8日前
株式会社エビス
腰ベルト用連結具
23日前
個人
深孔スリーブ駆動ロッド構造
1か月前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
1か月前
川崎重工業株式会社
制動システム
8日前
株式会社イノウ
給油口キャップ用開閉具
9日前
住友重機械工業株式会社
ロボット
2日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社不二越
垂直多関節ロボット
9日前
アイホン株式会社
ネジ締めカウントシステム
10日前
芝浦機械株式会社
双腕ロボット
1日前
パナソニック株式会社
工具
9日前
株式会社デンソーウェーブ
ロボット制御システム
29日前
パナソニック株式会社
工具
9日前
住友重機械工業株式会社
ロボット及びカバー
2日前
学校法人法政大学
装着型アシスト装置
1か月前
アピュアン株式会社
エアー式衝撃工具
26日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
2日前
住友重機械工業株式会社
アクチュエータ支持部材
1日前
株式会社マキタ
打ち込み工具
10日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
24日前
株式会社マキタ
インパクト工具
24日前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
SB C&S株式会社
治具セット
23日前
中国電力株式会社
電動ドライバー
1か月前
オムロン株式会社
モバイルロボット
1か月前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
26日前
JUKI株式会社
ハンドリング装置
1か月前
オムロン株式会社
モバイルロボット
1か月前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
1か月前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ