TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025021551
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125331
出願日
2023-08-01
発明の名称
ロボットシステム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
3/00 20060101AFI20250206BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】操作者による操作動作と連動してロボットを動作させる場合に、作業性の低下を抑制可能なロボットシステムを提供する。
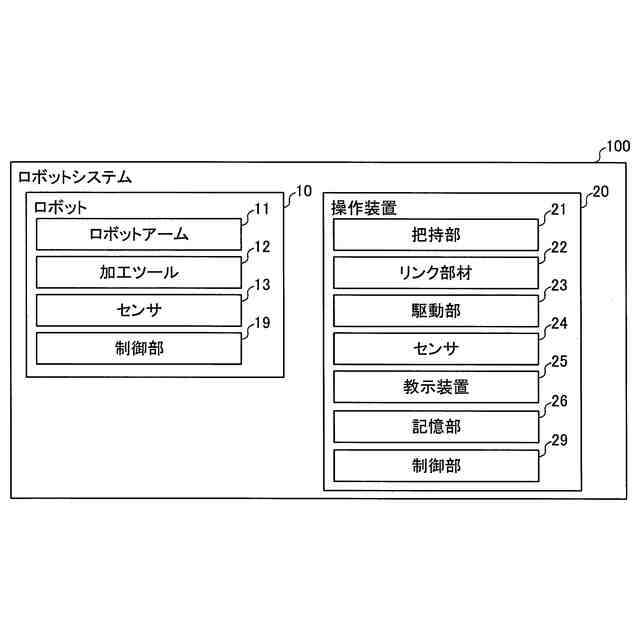
【解決手段】このロボットシステム100は、操作者による操作動作を検出する操作装置20と、操作装置20により検出された操作動作と連動して動作するロボット10と、ロボット10の動作範囲を、通常範囲から、通常範囲よりも範囲が小さい制限範囲に切り替える制御部29と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
操作者による操作動作を検出する操作装置と、
前記操作装置により検出された操作動作と連動して動作するロボットと、
前記ロボットの動作範囲を、予め設定された通常範囲から、前記通常範囲よりも範囲が小さい制限範囲に切り替える制御部と、を備える、ロボットシステム。
続きを表示(約 1,400 文字)
【請求項2】
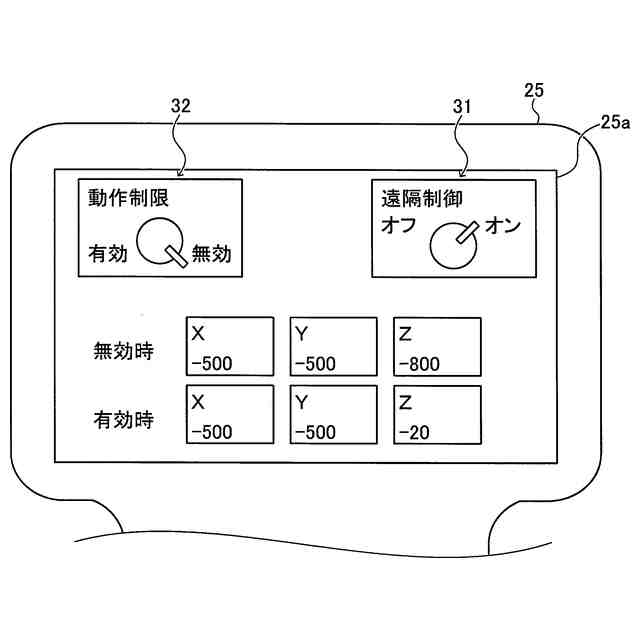
前記ロボットの動作範囲を切り替える操作を受け付ける切り替え操作部をさらに備え、
前記制御部は、前記切り替え操作部により受け付けられた操作に基づいて、前記ロボットの動作範囲を前記通常範囲から前記制限範囲に切り替える、請求項1に記載のロボットシステム。
【請求項3】
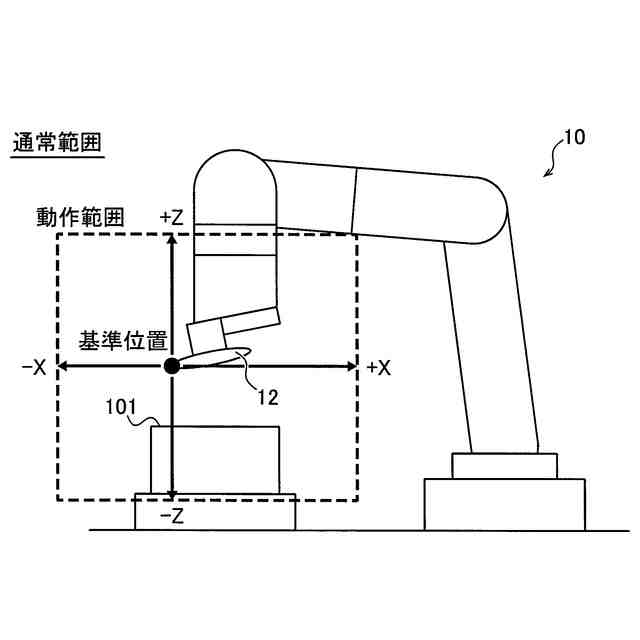
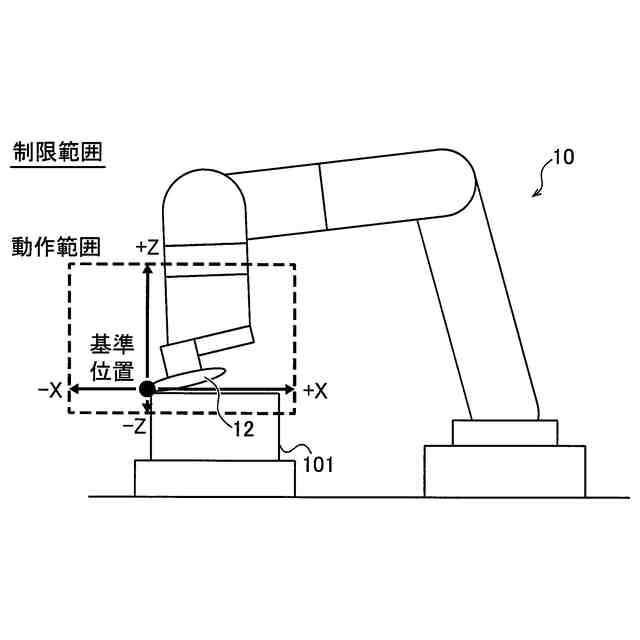
前記制御部は、前記ロボットに対して設定された制御点の基準位置を設定するとともに、設定された前記基準位置からの前記制御点の動作範囲を制限することによって、前記制限範囲を設定する、請求項1または2に記載のロボットシステム。
【請求項4】
前記ロボットは、前記ロボットに加えられる接触力を検出する接触センサを含み、
前記制御部は、前記接触センサからの検出結果に基づいて、前記接触力が検出されたタイミングにおける前記制御点の位置を前記基準位置として設定する、請求項3に記載のロボットシステム。
【請求項5】
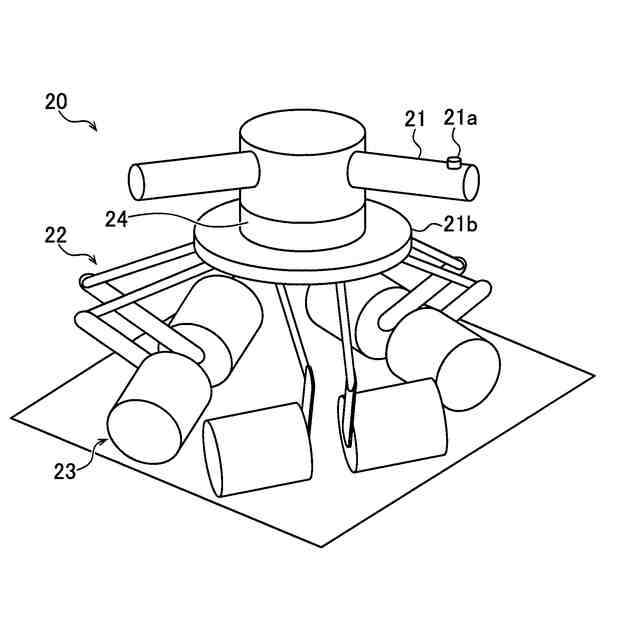
前記操作装置は、前記操作者により把持される把持部を含み、前記操作者による前記把持部を移動させる操作動作を検出し、
前記ロボットは、前記操作者による前記把持部を移動させる操作動作に連動して動作し、
前記制御部は、前記ロボットにおける前記通常範囲と前記制限範囲との各々の動作範囲に対応して前記把持部の移動範囲を制限する、請求項1または2に記載のロボットシステム。
【請求項6】
前記制御部は、前記ロボットの前記操作装置により検出された操作動作との連動が停止された状態で、前記ロボットの動作範囲を切り替える、請求項1または2に記載のロボットシステム。
【請求項7】
予め設定された前記制限範囲の大きさを記憶する記憶部をさらに備え、
前記切り替え操作部は、前記制限範囲の大きさを変更する操作を受け付け、
前記制御部は、前記切り替え操作部により受け付けられた操作に基づいて、前記記憶部に記憶された前記制限範囲の大きさを変更する、請求項2に記載のロボットシステム。
【請求項8】
前記切り替え操作部は、前記ロボットの動作を教示するための操作を受け付け、
前記制御部は、教示のための操作を受け付ける前記切り替え操作部により受け付けられた動作範囲を切り替える操作に基づいて、前記ロボットの動作範囲を切り替える、請求項2に記載のロボットシステム。
【請求項9】
前記ロボットは、研削加工を行う加工ツールが取り付けられるロボットアームを含み、
前記制御部は、前記ロボットの動作範囲を切り替えることによって、前記加工ツールの移動範囲を切り替える、請求項1または2に記載のロボットシステム。
【請求項10】
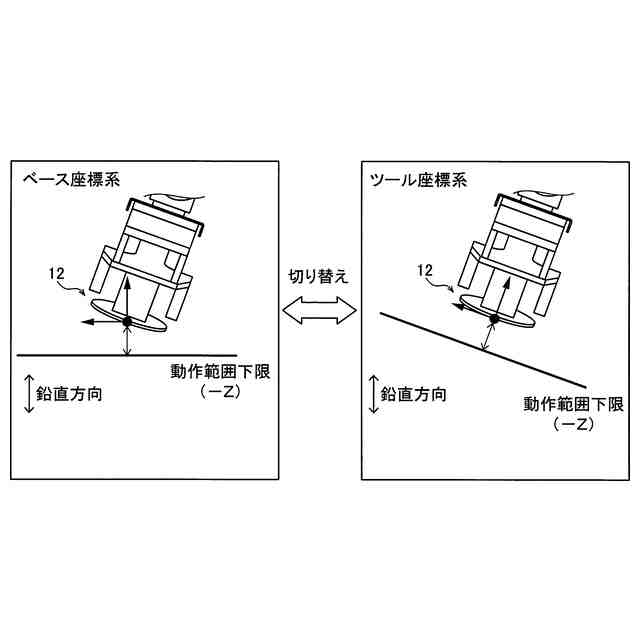
前記ロボットは、加工ツールが取り付けられるロボットアームを含み、
前記制御部は、
前記加工ツールの向きを基準としたツール座標系において前記ロボットを動作させることと、前記加工ツールの向きに係わらず絶対的な三次元空間を基準としたベース座標系において前記ロボットを動作させることとを切り替えるとともに、
前記ツール座標系における前記ロボットの動作と前記ベース座標系における前記ロボットの動作との各々において、前記ロボットの動作範囲を、前記通常範囲から前記制限範囲に切り替える、請求項1または2のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、スレーブ装置をマスタ装置に追従させるシステムが知られている。たとえば、特許文献1では、操作子を含むマスタ装置と、接触対象物に接触する接触子を含むスレーブ装置とを備える力触覚伝達システムが開示されている。上記特許文献1に開示されているシステムでは、マスタ装置とスレーブ装置との間で動作が追従するバイラテラル制御によって、マスタ装置の操作部に対して操作者が加えた力が、スレーブ装置に伝達される。これにより、操作者により操作子に加えられる力と連動してスレーブ装置が動作する。
【先行技術文献】
【特許文献】
【0003】
特許第6964293号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1の力触覚伝達システムでは、マスタ装置に加えられる操作者による操作動作と連動してスレーブ装置を動作させるため、マスタ装置に対する操作者の操作動作が直接的にスレーブ装置の動作に反映される。そのため、操作者は、スレーブ装置としてのロボットの動作が大きくなりすぎないように、マスタ装置としての操作装置に対する操作動作が大きくなりすぎないように注意する必要がある。これにより、動作範囲に注意しながら操作動作を行うことに起因して、ロボットの操作における作業性が低下する。このため、操作者による操作動作と連動するロボットを動作させる場合に、作業性の低下を抑制することが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、操作者による操作動作と連動してロボットを動作させる場合に、作業性の低下を抑制可能なロボットシステムを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面によるロボットシステムは、操作者による操作動作を検出する操作装置と、操作装置により検出された操作動作と連動して動作するロボットと、ロボットの動作範囲を、通常範囲から、通常範囲よりも範囲が小さい制限範囲に切り替える制御部と、を備える。
【0007】
この開示の一の局面によるロボットシステムは、上記のように、ロボットの動作範囲を、通常範囲から、通常範囲よりも範囲が小さい制限範囲に切り替える制御部を備える。これにより、ロボットの動作範囲を通常範囲よりも範囲が小さい制限範囲に切り替えることによって、ロボットの動作の動作範囲が大きくなりすぎることを制御部により自動的に抑制できる。そのため、動作範囲に注意しながら操作動作を行わずとも、ロボットの動作範囲が大きくなりすぎることを抑制できる。その結果、操作者による操作動作と連動してロボットを動作させる場合に、作業性の低下を抑制できる。
【発明の効果】
【0008】
本開示によれば、操作者による操作動作と連動してロボットを動作させる場合に、作業性の低下を抑制できる。
【図面の簡単な説明】
【0009】
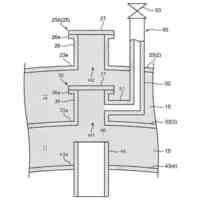
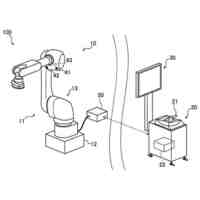
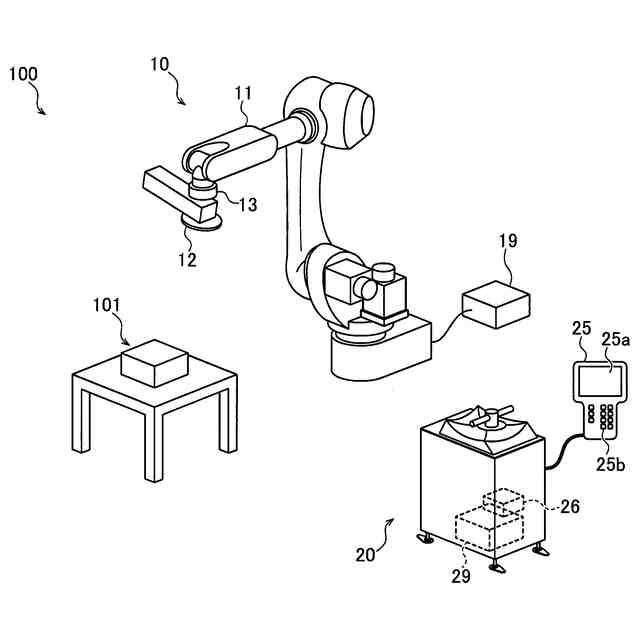
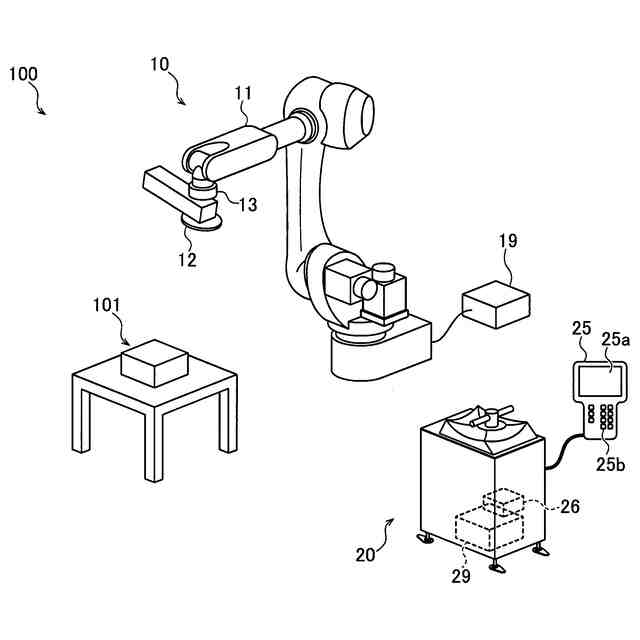
一実施形態によるロボットシステムの全体構成を示した斜視図である。
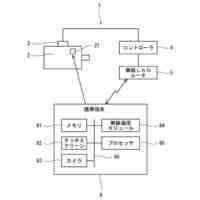
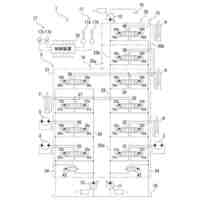
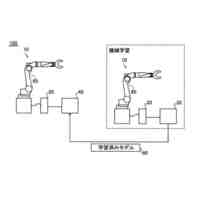
一実施形態によるロボットシステムの構成を示したブロック図である。
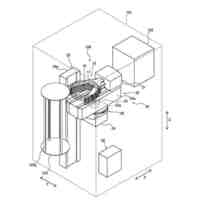
一実施形態による操作装置の構成を説明するための斜視図である。
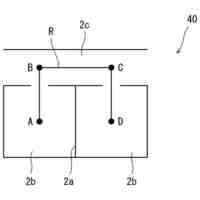
通常範囲におけるロボットの動作範囲を模式的に示した図である。
制限範囲におけるロボットの動作範囲を模式的に示した図である。
教示装置のタッチパネルを模式的に示した図である。
ベース座標系とツール座標系との切り替えを説明するための図である。
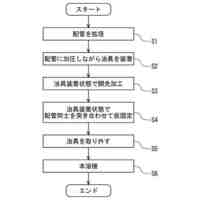
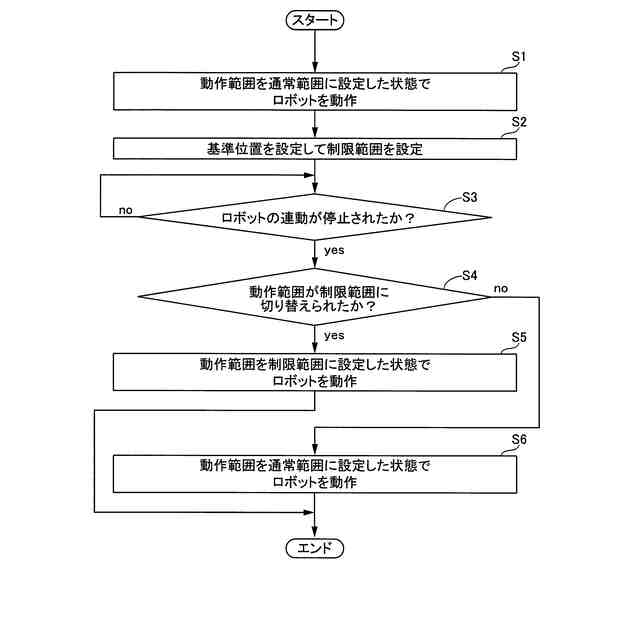
ロボットシステムによるロボットの動作範囲の切り替え処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の一実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
配管加工方法
3日前
川崎重工業株式会社
三重殻タンク
4日前
川崎重工業株式会社
三重殻タンク
4日前
川崎重工業株式会社
音響構造材及び構造体
4日前
川崎重工業株式会社
液化ガスシールシステム
4日前
川崎重工業株式会社
三重殻タンクのパージ方法
9日前
川崎重工業株式会社
プログラムおよびデータ処理方法
3日前
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
3日前
川崎重工業株式会社
ロボットシステム、および、画像処理方法
3日前
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
3日前
川崎重工業株式会社
液圧駆動システム、及びマルチコントロール弁
23日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの監視方法
3日前
川崎重工業株式会社
位置推定装置、位置推定方法及び位置推定プログラム
4日前
川崎重工業株式会社
バイオガス化施設と炭化燃料化施設を備える複合施設
9日前
川崎重工業株式会社
基板搬送ロボット、および、基板搬送ロボットの制御方法
3日前
川崎重工業株式会社
ロボットシステム、ブレーキ判定方法、および、ブレーキ判定プログラム
10日前
川崎重工業株式会社
診断/治療支援ロボット
18日前
川崎重工業株式会社
グリス交換時期予測方法
2日前
川崎重工業株式会社
ワーク搬送方法、ワーク搬送装置およびワーク搬送プログラム
18日前
個人
腰袋
1か月前
株式会社アイセイ
搬送装置
3日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
23日前
国立大学法人金沢大学
ロボット
9日前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットリスト
1か月前
株式会社ケー・エフ・シー
締結構造
13日前
日本車輌製造株式会社
締め付け工具
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
日本信号株式会社
作業機制御システム
23日前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社京阪エンジニアリング
脱着装置
24日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ