TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025022239
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023126652
出願日
2023-08-02
発明の名称
腰袋
出願人
個人
代理人
個人
主分類
B25H
3/00 20060101AFI20250206BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】容易に腰ベルトに着脱できる腰袋を提供する。
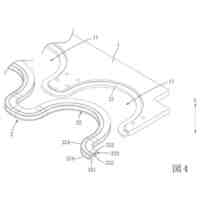
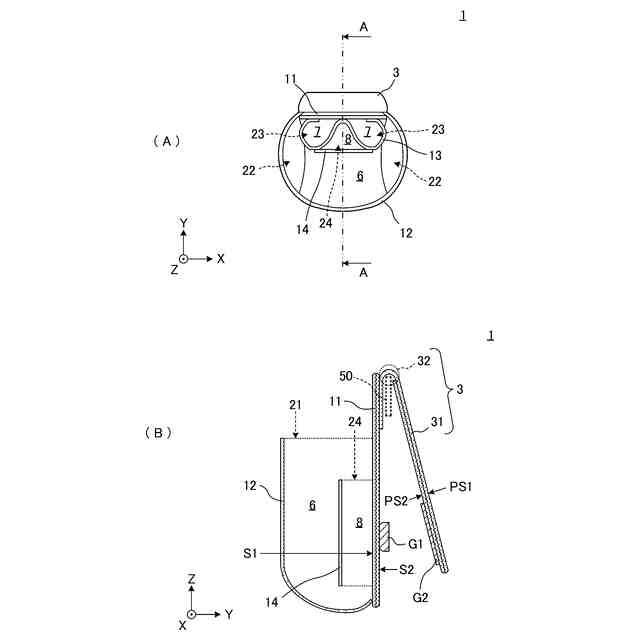
【解決手段】腰袋1は、開口21を有する収納部2、二つに折り曲げて可塑変形したベルト取付部材3、収納部2の外面に取り付けられた第1磁性体G1、ベルト取付部材3に取り付けられた第2磁性体G2を備える。ベルト取付部材3は、ベルト受け部32、長尺状のベルト挿込部31を有する。ベルト取付部材3を折り曲げた状態で、ベルト挿込部31は収納部2の外面の一部を覆い、第1磁性体G1および第2磁性体G2は少なくとも一部が対向する。ベルト挿込部31は、第1磁性体G1および第2磁性体G2が磁力によって吸着して、収納部2に固定される。
【選択図】図5
特許請求の範囲
【請求項1】
作業者の腰に装着する腰ベルトに吊下げる腰袋であって、
開口を有する袋状の収納部と、
二つに折り曲げて可塑変形し、 前記収納部の上側に連結したベルト取付部材と、
前記収納部の外面に取り付けられた第1磁性体と、
前記ベルト取付部材に取り付けられた第2磁性体と、
を備え、
前記ベルト取付部材は、前記腰ベルトに引っ掛けるベルト受け部と、前記腰ベルトと前記作業者との間に挿通する長尺状のベルト挿込部と、を有し、
前記ベルト取付部材を折り曲げた状態で、前記ベルト挿込部はフラップ状に前記収納部の外面の一部を覆い、かつ、前記第1磁性体および前記第2磁性体は少なくとも一部が対向し、
前記ベルト挿込部は、前記第1磁性体および前記第2磁性体が磁力によって互いに吸い付くことで、前記収納部に固定される、腰袋。
続きを表示(約 220 文字)
【請求項2】
前記ベルト挿込部を前記収納部に固定した状態で、前記ベルト受け部から前記第1磁性体および前記第2磁性体が接触した部分までの長さは、10cm以上である、請求項1に記載の腰袋。
【請求項3】
前記ベルト挿込部の平面形状は先細り形状である、請求項1に記載の腰袋。
【請求項4】
前記収納部の素材、および前記ベルト取付部材の素材は、主に牛革である、請求項1から3のいずれかに記載の腰袋。
発明の詳細な説明
【技術分野】
【0001】
本発明は、工具等を収容するために、作業者が腰に吊下げて使用する腰袋に関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来から作業現場等では、作業時に用いる工具等(工具や小物、道具)を収容・携帯するため、腰に吊下げる腰袋が用いられている。これらの腰袋の多くは、腰に巻くズボン等の腰ベルトに装着するタイプであり、工具等を収納する収納部とベルト通し部とを有する。
【0003】
例えば特許文献1,2には、帯状部材の両先端を縫着(溶着、またはリベット止め)してループ状(筒状)にしたベルト通し部に、腰ベルトを挿通する腰袋がそれぞれ開示されている。
【先行技術文献】
【特許文献】
【0004】
実全平01-114287号公報
特開2018-134715号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の腰袋は、ループ状のベルト通し部に腰ベルトを挿通して取り付けるため、作業中に外れ難い。しかし、その一方で、取り付ける際はベルト通し部に腰ベルトを通す作業が必要であり、取り外しの際はベルト通し部から腰ベルトを引き抜く作業が必要である。つまり、上記の腰袋の取り付け・取り外しは容易ではなく、かなり手間がかかるという問題があった。本発明の目的は、作業中には外れ難く、かつ、容易に腰ベルトに着脱できる腰袋を提供することにある。
【課題を解決するための手段】
【0006】
本発明の腰袋は、作業者の腰に装着する腰ベルトに吊下げるものであって、
開口を有する袋状の収納部と、
二つに折り曲げて可塑変形し、 前記収納部の上側に連結したベルト取付部材と、
前記収納部の外面に取り付けられた第1磁性体と、
前記ベルト取付部材に取り付けられた第2磁性体と、
を備え、
前記ベルト取付部材は、前記腰ベルトに引っ掛けるベルト受け部と、前記腰ベルトと前記作業者との間に挿通する長尺状のベルト挿込部と、を有し、
前記ベルト取付部材を折り曲げた状態で、前記ベルト挿込部はフラップ状に前記収納部の外面の一部を覆い、かつ、前記第1磁性体および前記第2磁性体は少なくとも一部が対向し、
前記ベルト挿込部は、前記第1磁性体および前記第2磁性体が磁力によって互いに吸い付くことで、前記収納部に固定されることを特徴とする。
【0007】
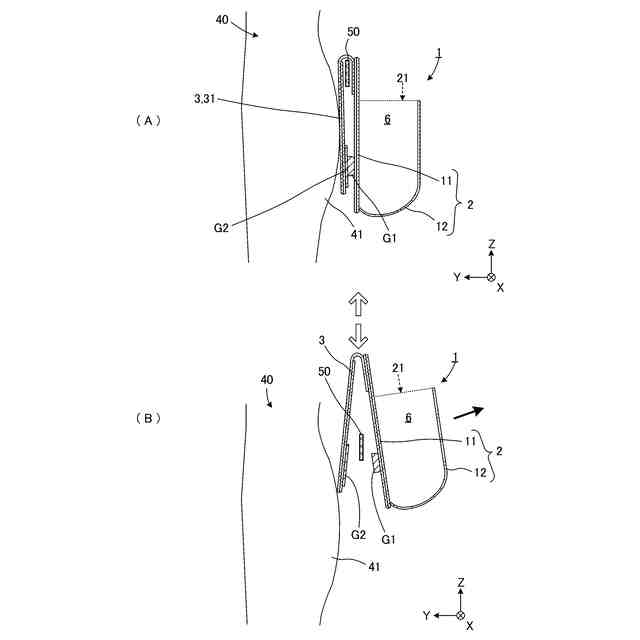
一般に、腰ベルトに掛ける腰袋は、ループ(環状・筒状)のベルト通しに腰ベルトを挿通して装着するタイプが多い。これら腰袋は、車や徒歩での移動時や飲食店等への入店時に取り外したり、作業再開時には再び取り付けたりと、一日の中で何度か取り付け・取り外しを繰り返し行う必要がある場合がある。しかしながら、従来の上記腰袋の取り付け・取り外しには腰ベルトへの着脱を伴うため、取り付け・取り外しには手間がかかってしまうという問題があった。本発明の構成によれば、取り付ける際は、作業者と腰ベルトとの間にベルト挿込部を挿し込んで、ベルト受け部を腰ベルトに引っ掛けた後、第1磁性体と第2磁性体を磁力で吸着させるだけで固定できるため、取り付けが容易である。また、取り外す際は、収納部またはベルト挿込部を上方に引き抜くだけで、第1磁性体と第2磁性体が離れて、容易に取り外すことができる。このように、余計な手間や時間をかけず、片手でも容易に取り付け・取り外しが可能な腰袋を実現できる。
【0008】
また、本発明では、比較的剛性の高い素材からなる収納部およびベルト取付部材に、それぞれ第1磁性体および第2磁性体が取り付けられた構造である。例えば、収納部やベルト取付部材の剛性が低いと外力等によって変形しやすいため(撚れやすいため)、第1磁性体および第2磁性体の位置がずれやすくなって、ベルト取付部材と収納部との固定が上手くできない虞がある。したがって、上記構成によれば、腰袋を取り付ける際に第1磁性体および第2磁性体の相対的な位置がずれにくくなり、ベルト取付部材および収納部の固定が安定化する。
【0009】
また、本発明では、ベルト受け部が、二つに折り曲げられた状態で可塑変形している。腰ベルトを引っ掛けるベルト受け部が可塑変形していないと、ベルト取付部材の様々な箇所に腰袋等の重量による応力が掛かって、吸着させた第1磁性体と第2磁性体が離れやすくなる場合がある。また、腰ベルトを引っ掛けるベルト受け部が可塑変形していないと、腰ベルトが引っ掛かる箇所が毎回異なることになり、ベルト取付部材と収納部(第1磁性体と第2磁性体)の固定が不安定となる虞がある。一方、ベルト受け部が二つに折り曲げられた状態で可塑変形していることにより、余計な応力が第1磁性体および第2磁性体に掛かるのを抑制でき、外れ難くできる。また、上記構成によれば、取り付ける際に腰ベルトが引っ掛かる箇所が毎回略同じ位置になるため、ベルト取付部材と収納部の固定が安定化する。
【発明の効果】
【0010】
本発明によれば、作業中に外れ難く、かつ、容易に腰ベルトに着脱が可能な腰袋を実現できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
深孔スリーブ駆動ロッド構造
3日前
株式会社不二越
ロボット操作装置
10日前
個人
バール
3日前
梅馨堂合同会社
人協働ロボットシステム
5日前
ARMA株式会社
UI付エンドエフェクタ
6日前
株式会社マキタ
作業機
10日前
三菱電機株式会社
トルク締め個所検出システム
3日前
高丸工業株式会社
ロボット操作システムの動作方法
3日前
JUKI株式会社
ハンドリング装置
5日前
株式会社SUBARU
ボルトの電動締結工具
6日前
元烽企業有限公司
炉芯管保持装置
7日前
東京ロボティクス株式会社
物体操作方法、ロボット及びプログラム
3日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
6日前
川崎重工業株式会社
指令値送信装置、制御システム、及び、指令値送信方法
3日前
株式会社不二越
入出力信号保持装置及び入出力信号保持装置システム
5日前
オムロン株式会社
経路計画装置、方法、及びプログラム
11日前
国立大学法人九州工業大学
把持装置、把持システムおよび把持装置の制御方法
10日前
セイコーエプソン株式会社
ロボットの制御方法およびロボットシステム
4日前
東京ロボティクス株式会社
物体操作装置、多関節ロボットアーム、及び移動ロボット
3日前
株式会社国際電気通信基礎技術研究所
制御信号送信システム、及びリフレクトアレー
5日前
ARMA株式会社
UI付エンドエフェクタ
6日前
三和コンベア株式会社
搬送システム及びプログラム記憶媒体
4日前
コネクテッドロボティクス株式会社
検出方法
6日前
パナソニックIPマネジメント株式会社
工具システム、工具、処理方法及びプログラム
5日前
株式会社東芝
処理装置、処理システム、ハンドリングシステム、処理方法、プログラム、又は記憶媒体
3日前
キヤノン株式会社
ロボットシステム、制御方法、物品の製造方法、プログラム及び記録媒体
3日前
キヤノン株式会社
駆動装置、制御方法、ロボット、プログラム、記録媒体、物品の製造方法
6日前
本田技研工業株式会社
遠隔操作制御装置、操作制御システム、遠隔操作制御方法、およびプログラム
5日前
キヤノン株式会社
ロボットシステム、制御方法、物品の製造方法、プログラム、及び記録媒体
6日前
株式会社東芝
制御装置、保持システム、荷役装置、処理方法、プログラム、及び記憶媒体
3日前
キヤノン株式会社
ロボット、ロボットの制御方法、プログラム、記録媒体、物品の製造方法、駆動装置、駆動装置の制御方法
3日前
キヤノン株式会社
ロボット、ロボットの制御方法、駆動装置、駆動装置の制御方法、物品の製造方法、プログラム、記録媒体
3日前
美之嵐機械工業有限公司
3つの運動エネルギーを有する電動・エアースクリュードライバー
7日前
キヤノン株式会社
ロボットシステム、ロボットシステムの制御方法、移動架台、移動架台の制御方法、物品の製造方法、プログラム、記録媒体
5日前
キヤノン株式会社
ロボットシステム、ロボットシステムの制御方法、ロボットシステムを用いた物品の製造方法、移動装置、移動装置の制御方法、台、制御プログラム及び記録媒体
4日前
他の特許を見る





 特許ウォッチ
特許ウォッチ